Материал: 1671
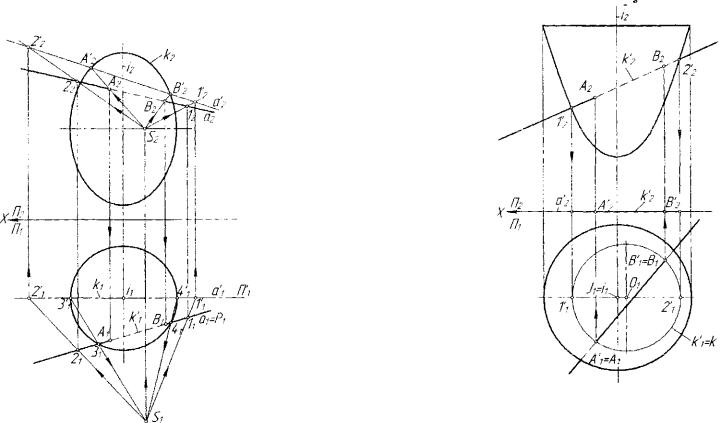
Определим точки пересечения эллипсоида вращения 0 и прямой линии а (рис. 7.18). В соответствии с предложенным выше алго ритмом заключим прямую а в проецирующую плоскость 7*17/,.
Получим |
ах= Р\ |
(след |
проецирующей |
плоскости |
Р). |
Отрезки |
||||
3 4 ' , = А;, |
и |
3,4, = к\ |
представляют собой |
вырожденные |
проекции |
|||||
двух конических |
сечений |
- |
эллипсов к' |
и к, где к'=РГ]0, к |
- |
|||||
фронтальный |
очерк квадрики |
0. На основании свойства 2 |
квадрики |
|||||||
определяем вначале проекцию |
S, =3'1 3,П4',4,, а затем |
S2 |
центра |
S |
||||||
проецирующей связки |
Ф 5 " ' . Отображая этой связкой компланарные |
|||||||||
линии к' и а на плоскость отображения 77", которой принадлежит линия к , получаем образы этих линий: к'—> к(кх,к2), а-*а'(и\,а\).
Рис. 7.18. Пример определения пересечения прямой и квадрики
230
Определяем проекции образов искомых точек a'2f]k2 |
= |
(А'2,В'2), а |
|
затем |
и сами прообразы: А\ —» А2 еа2, В\ —> В2 еа2; |
А2 |
-» Ах е сц, |
В2-> |
Вхеах. |
|
|
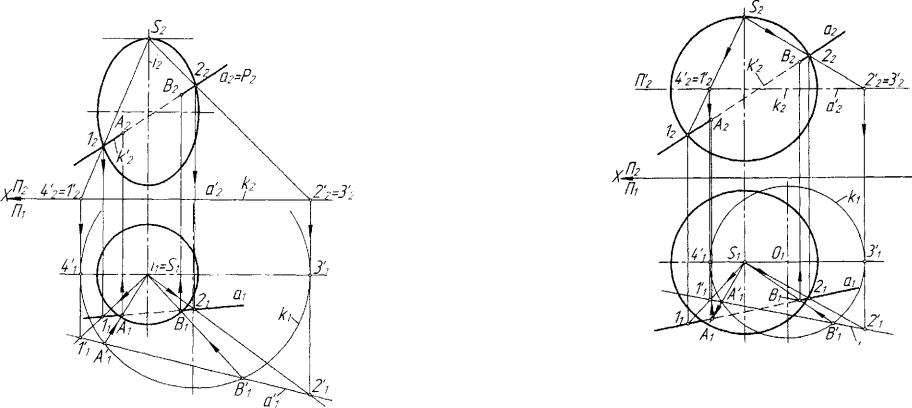
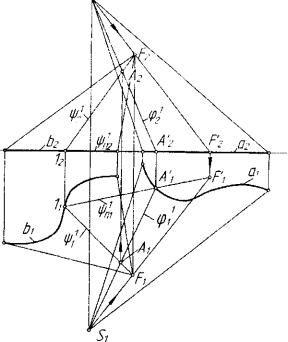
Рассмотрим другой пример. Определим точки пересечения прямой а и параболоида вращения 0 (рис. 7.19). Решение задачи выполним на основе использования омбилической точки. Как было отмечено выше (при пояснении геометрического смысла и значения
омбилической точки), |
проецирование наклонного конического |
|||||||||||
сечения |
параболоида |
вращения |
© |
из |
его |
несобственной |
||||||
|
|
|
омбилической точки (несоб |
|||||||||
|
|
|
ственной точки jr оси вра |
|||||||||
|
|
|
щения |
|
/) |
на |
плоскость, |
|||||
|
|
|
перпендикулярную |
оси |
вра |
|||||||
|
|
|
щения |
i, дает |
окружность. |
|||||||
|
|
|
В таком |
случае отображение |
||||||||
|
|
|
компланарных линий |
а з |
Р |
|||||||
|
|
|
и |
к'= |
Pf\& |
проецирующей |
||||||
а2=Рг |
|
|
связкой |
с |
несобственным |
|||||||
|
|
|
центром |
./^ (У,,./.,,) |
на |
оси |
||||||
|
|
|
; |
поверхности |
0 |
на |
плос |
|||||
|
|
|
кость |
отображения |
п = |
Я, |
||||||
|
|
|
дает |
образы |
этих |
|
линий: |
|||||
|
|
|
прямую |
ЛИНИЮ |
а'(а\,а'2) |
|
И |
|||||
|
|
|
окружность к(кх,к2), кото |
|||||||||
|
|
|
рые |
позволяют |
получить |
|||||||
|
|
|
искомые |
точки |
А(А{,А7) И |
|||||||
|
|
|
В{В1.в2) пересечения |
af) |
& . |
|||||||
|
|
|
|
На рисунке 7.20 |
приве |
|||||||
|
|
|
дено решение задачи опре |
|||||||||
|
|
|
деления |
точек |
пересечения |
|||||||
|
|
|
прямой |
а |
и |
поверхности |
||||||
|
n1=d1 |
|
эллипсоида |
вращения |
© |
с |
||||||
|
|
|
осью |
/ _L 77, |
|
Для |
|
этих |
||||
|
Рис. 7.19. Пример определения |
целей |
выбрана |
проецирую |
||||||||
|
пересечения прямой и квадрики |
|||||||||||
|
щая связка Ф2(1) |
с центром в |
||||||||||
омбилической точке S(SX,S2) и плоскость отображения П-Пх. |
||||||||||||
Отображение компланарных линий |
а с Р и |
к'=РС\0 на плоскость |
/7, |
|||||||||
|
|
231 |
|
|
|
|
|
|
|
|
|
|
позволяет получить образы этих линий |
- |
прямую а'(а\,а'2) и окруж |
|||||
ность к(к{,к2). Точки пересечения |
А' |
и |
В' |
этих образов позволяет по |
|||
строить их |
прообразы А |
и В |
в |
рассматриваемом |
отображении: |
||
А'-* А(АиА2), |
В'-> В(ВиВ2). |
Точки |
|
А |
и |
В являются |
результатом |
решения задачи.
Рис. 7.20. Пример определения пересечения прямой и квадрики
Т1а |
рисунке 7.21 |
приведены |
построения |
для определения точек |
|||
пересечения |
прямой |
а |
и поверхности сферы 0. Проецирующая |
||||
связка |
Ф2(и |
определена |
своим |
центром - |
омбилической |
точкой |
|
S(SUS2) |
сферы , плоскостью отображения служит плоскость |
П'IIП,, |
|||||
проходящая |
через центр |
сферы |
0. Искомыми являются |
точки |
|||
А(АРА2) |
иВ(В,,Я2 ). |
|
|
|
|
|
|
Для всех вышерассмотренных задач на пересечение, в условия, которых была задана квадрика, решения выполнялись на основе кон струирования центра проецирующей связки Ф2(,) и выборе некоторой плоскости отображения.
Рис. 7.21. Пример определения пересечения прямой и квадрики
В некоторых случаях для достижения наибольшей простоты в построениях удобно применить некоторое линейное преобразование пространства Ej, в результате которого исходная квадрика преобразу ется в квадрику вращения. Пусть, например, заданы эллиптический параболоид 0, прямая а, и требуется определить точки пересечения аГ\0 (рис, 7.22). Выполним родственное преобразование простран ства £ 3 , в результате которого эллиптический параболоид 0 преобра зуется в параболоид вращения & с осью вращения /', которая служи ла для поверхности 0 линией центров непрерывного множества эл-
2 3 2 |
2 3 3 |
|
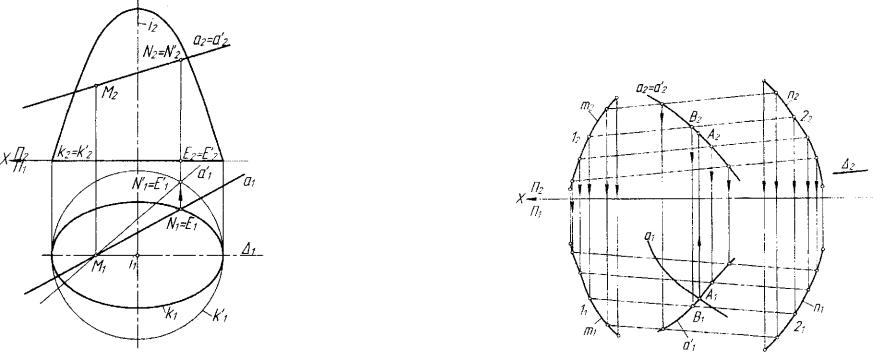
липсов в плоскостях, перпендикулярных линии i. Очевидно, гранич ный эллипс AX^j,^) отсека параболоида © преобразуется в окруж
ность |
к\к\,к\). |
Введенное |
родственное |
преобразование |
определено |
||||
двойной плоскостью |
АНП2 |
родства, проходящей через ось |
/ поверх |
||||||
ности |
& и |
парой |
соответственных |
в родстве |
точек |
E^^EQ) и |
|||
Е(Е1,Е2) таких, что |
ЕЕ' |
J_ |
А. |
Прямой |
линии « ( а , , ^ ) соответствует |
||||
ее образ - прямая а'{а\ |
,а\ |
) |
во введенном родстве |
(А,Е,Е'). |
|||||
В результате применения родственного преобразования получаем
Рис. 7.22. Пример применения преобразования (родства)
задачу определения точек пересечения А'Г]&, решение которой было рассмотрено выше (рис. 7.19). Полученные точки пересечения A'F)@' являются образами искомых точек в родстве (А,Е,Е). Выполнив по-
строения прообразов точек пересечения а'Г\0' в родстве, тем самым получим искомые точки пересечения af]0.
Рассмотрим применение алгоритма 7.3 для случая линейчатой поверхности, не являющейся квадрикой. Определим пересечение про странственной кривой а и поверхности цилиндроида 0(т,п,А) (рис. 7.23), у которого линии т и п - направляющие линии, плос кость A JL П2 - плоскость параллелизма. В соответствии с алгорит мом 7.3 примем связку проецирующих, относительно плоскости П2,
прямых |
в |
качестве |
фактормножества |
пространства |
|
Е3 = Е2{{) |
={Jcr]. В этом |
случае заданной линией а |
выделяется из |
||
|
|
2 |
|
|
|
связки {Jax |
проецирующая поверхность Р(а,П2) = {Jcr1, |
где <г] - про- |
|||
2 |
|
|
|
I |
|
ецирующая относительно п2 прямая, пересекающая линию а.
Рис. 7.23. Пример определения пересечения кривой линии и цилиндроида
Линия пересечения а'±(а\,а'2)= РГ]0 есть образ линии а на
поверхности 0 в отображении связкой [ja1. Точка А(Ау,А2) пересе-
2
2 3 4 |
235 |
чения образа d и прообраза а является искомой точкой пересечения
аГ\в.
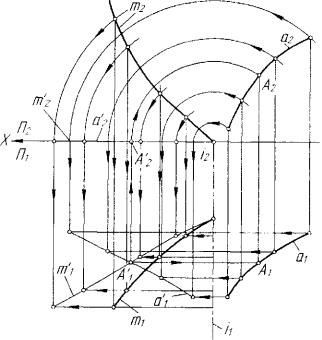
Рассмотрим пример применения алгоритма 7.4 для случая поверхности вращения, также не являющейся квадрикой. Определим пересечение пространственной кривой а и поверхности вращения @(i,m), где /'(/,,/2) 1 П2 ~ ось вращения поверхности, т(тх,т2) - ее образующая линия (рис. 7.24). Для решения задачи в соответствии с алгоритмом 7.4 примем прямую i в качестве оси нормальной циклической конгруэнции \Jiy], плоскости окружностей ц/] которой
2
перпендикулярны оси /'. Рассматривая эту конгруэнцию в качестве
Рис. 7.24. Пример определения пересечения кривой линии и поверхности вращения
проецирующего фактормножества пространства 7%, то есть Е3 = *Р2(1) = Uv7' > и принимая плоскость П - Пу в качестве плоскости
2
отображения, строим образ — вырожденное (поскольку поверхность
&(i,m) |
является |
проецирующей) |
отображение |
т'(т\,т'2) |
||||
поверхности 0(i,m) и образ а\а\,а'2) |
заданной |
линии |
а |
на |
||||
плоскости П{ |
в этом |
проецирующем отображении. |
Точка |
А\А\,А\) |
||||
является образом искомой точки пересечения. Прообраз |
- точка |
|||||||
А(А1,А2), |
полученная |
по схеме |
А\ -> АА |
е а,; А'2 -> А2 е а2, |
есть |
|||
искомый результат решения задачи. |
|
|
|
|
||||
7.4. |
Алгоритмы конструктивного определения множества |
|||||||
пересечения двух двумерных нелинейных множеств |
|
|
||||||
|
|
|
(поверхностей) |
|
|
|
|
|
Одной из наиболее сложных в алгоритмическом построении и |
||||||||
конструктивной |
реализации |
задач, |
рассматриваемых |
в |
||||
начертательной геометрии, является задача о построении линии пересечения двух поверхностей. Для ее решения применяются различные способы: вспомогательных плоскостей, вспомогательных поверхностей и др. |2, 15, 20, 22J. Покажем, используя различные отображения пространства i% на плоскость, что эти способы являются логическим следствием общего теоретико-множественного подхода к решению задач на пересечение рассматриваемого типа.
Рассмотрим решения задач на основе применения линейного фактормножества пространства Е^. Этот подход применяется в тех случаях, когда одна из двух пересекающихся поверхностей является конической или цилиндрической. Такая поверхность, представляемая
как линейное однопараметрическое множество Ф1(1) =U<p' |
линейных |
||
классов <р{, в |
соответствии с алгоритмом 7.2, индуцирует |
||
проецирующее |
фактормножество |
Ф2(,) = [jtp1 - Еъ. |
Это |
|
|
2 |
|
фактормножество представляет собой проецирующую связку прямых с собственным или несобственным центром - ядром проецирования, которое исключается из фактормножества. В свете сказанного покажем применение алгоритма 7.2 для двух пересекающихся конических поверхностей &(S,а) и Q(F,b), где а(ах,а2) и b(bx,b2)
направляющие линии этих поверхностей (рис. 7.25). Поверхность О представляем следующим образом: 0 - Ф ш ) = [)q>1, где tp] - образующая прямая этой поверхности. Принимая вершину S в
236 |
237 |
качестве |
исключеного ядра |
проецирующей |
связки Ф2(1)=и^\ |
||
пространство Еъ |
представляем |
проецирующим |
фактормножеством: |
||
Еу = Ф2(!) - U ^ 1 . |
Поверхность Q представляем следующим образом: |
||||
О = |
= U ^ ' , |
где (//' - образующая прямая этой поверхности. |
|||
Примем плоскость П = Я,, которой принадлежит обе линии а |
и b ,в |
||||
качестве |
плоскости отображения. В таком случае линию |
а(ах,а2) |
|||
можно рассматривать как образ поверхности 6> в ее отображении связкой U<p' *>а плоскость 11х. Возьмем любую образующую
y/]{y\,4/\)czQ и две точки F(F1,F2) и l(lul2) на ней. Используя проецирующую связку, построим образ F'(FX,F'2) точки F на
X
/7;
Рис. 7.25. Пример определения точки линии пересечения двух конических поверхностей
плоскости Я, : F2 -» V\; F\-> F\eSxFx. Образом точки 1 будет сама точка. В итоге получаем образ yniWn\^w\ii) [ФЯМ0И W1 в принятом отображении. Точка А'(А\,А'2) = у/пГ]а есть образ искомой точки пересечения. Сама точка А - проообраз, определяется гак: А\ -> Аг е у/\, А'2-> А2 ву/\. Очевидно, образом поверхности Q в рассматриваемом отображении будет пучок прямых с центром
Рассмотрим еще пример применения в алгоритме 7.2 проецирующего фактормножества пространства Е3> представля
ющего собой связку Ф2(1)=и^' прямых ср . Определим несколько
2
точек линии персечения конической поверхности 0(S,m) и поверхности вращения Q(a,t), где m a t — соответственно направляющая и образующая линии, а - ось вращения (рис. 7.26). Последовательность алгоритмических действий и конструктивных построений может быть нижеследующей.
1. Поверхность 0 представляем как непрерывное однопарамет рическое множество прямых линий: О - Ф1(1) = {jcpl, где <р\(р\,(р\) - образующая этой поверхности.
2.Пространство £, "заменяем" фактормножеством £3 = Ф2<1) =
=[j(pl, представляющем собой проецирующую связку с исключен-
2
ным ядром 5(5,,5 2 ).
3. В качестве плоскости отображения принимаем плоскость
Я= Л,, которой принадлежит направляющая линия Ш поверхности
0.В этом случае образом поверхности 0 в принятом отображении
будет |
ее направляющая |
т(тх,т2). |
4. |
Поверхность Q(a,t) представляем как непрерывное однопара |
|
метрическое множество |
Wm = {Jy/X окружностей у/1 (\{/\,уА), |
|
принадлежащих нормальной циклической конгруэнции с осью а .
5.Строим отображение одной из линий - окружности у1 на
плоскость |
11-у. При этом центр 0(Ох,02) окружности у/ отображается |
в точку |
0'(0\,0'2), одна из ее точек 1(1M,12) - в точку I'O'i Д'г)- |
238 |
239 |