Материал: 1671
ГЛАВА 2. ГЕОМЕТРИЧЕСКОЕ МОДЕЛИРОВАНИЕ ЕВКЛИДОВА ПРОСТРАНСТВА
В геометрии известны следующие методы моделирования абст рактных пространств: аналитический, конструктивный и аксиомати ческий [16, 24]. При аналитическом моделировании в зависимости от структуры исходного пространства применяют различные системы координат. В случае евклидова пространства, характеризующегося линейной структурой, применяются: декартова, сферическая, цилинд рическая системы координат. Для аффинного и проективного про странств применяются соответственно косоугольная и проективная системы координат. Для моделирования линейчатого пространства с основным объектом - прямой линией, характеризующеюся квадра тичной структурой, применяют плкжкеровы координаты, удовлетво ряющие однородному квадратному уравнению [17, 28].
Вслучае конструктивного моделирования исходное пространство
иего модель связаны некоторой проекционной системой, включаю щей проецирующие линии и поверхности. Такое моделирования дос таточно очевидно и наглядно. Оно является основным методом ис следования в классической начертательной геометрии.
При аксиоматическом моделировании отсутствует конструктив ная проекционная связь между исходным пространством и его моде лью - пространством образов. Важным критерием существования ак сиоматической модели исходного пространства является равенство размерностей основного объекта пространства и его образа на модели
исохранение структуры пространства на его модели.
2.1.Конструктивные модели пространства Еп
В главе 1 было показано, что операция проецирования устанав ливает однозначное отображение точек {А е £ „ ) - » (Л'е П2), однако она не позволяет установить обратное отображение А'-+ А. Поэтому утверждается, что поле точек 112 не является моделью пространства Еп. С практической точки зрения чрезвычайно важно, чтобы отобра жение Е„ —> П2 было взаимно однозначным почти для всего про странства Еп. Термин "почти" означает, что отображение Еп <-> П2 будет взаимно однозначным кроме конечного числа подпространств Е„ и конечного числа точек и прямых плоскости П2. Если такое ото-
40
бражение получено, то говорят, что построена обратимая модель про странства £„ на плоскости П2. Смысл обратимости состоит в том, что по заданному образу точки на П2 можно восстановить прообраз этой точки в Е„. Однако образом не может быть точка, так как двух
параметрическое множество точек П2 не эквивалентно п |
парамет |
рическому множеству точек Еп: оо2 Ф С О " . Следовательно, |
образом |
должна быть некая фигура Ф е П2, состоящая из конечного числа то чек и прямых, связанных условиями инцидентности в определенном порядке. Например, это может быть к точек (А:-вершинник, полный к -угольник) или к прямых (А-сторонник), пригодные для модели рования четномсрных пространств Е2к, это могут быть кривые (ок ружности, параболы, эллипсы и гиперболы для моделирования £ 3 , Е4, Е5 соответственно), множества кривых и др.
Поскольку в данной главе мы имеем дело с линейным простран ством, то использовать в качестве образов кривые линии нет необхо димости. Ограничимся только фигурами, состоящими из точек и пря
мых. Пусть пространство Еп |
четномерно: п = 2к. Тогда, используя к |
|||||||
операций |
проецирования |
из |
( я - З ) - м е р н ы х центров |
5,',_3, i-\,...,k |
||||
на плоскость П2, получим |
к |
точек А' е П2 |
в качестве |
образа точки |
||||
А € 5„ . Возникает |
вопрос, |
как |
должны |
быть |
выбраны центры |
|||
{Sl,_3}<zE„, |
чтобы |
отображение |
(А е Е„) О |
({А1} |
с Пг) |
было обра |
||
тимым? Для ответа на него будем рассуждать следующим образом.
Пусть |
5^_3 выбраны в |
Е„ совершенно независимо друг от друга. То- |
|||
, |
i |
|
к . |
|
Yi |
гда /А[ ,S'N_3) = PLN_2. Можно заметить, что Г\К-2 = Л, где к = |
. Дей- |
||||
СТВИТеЛЬНО, Р^2Г\Рп-2 |
- En-4 ' |
En~S\Pn-2 = Еп-Ь > |
Еп-бС\Р*-2 |
= Е п - К > |
|
En |
2kl2f)P*-2 =Еп-2к |
=Ео =А- |
Таким образом, |
условие |
обрати |
мости модели пространства Еп |
для точки удовлетворяется. По удов |
||||
летворяется ли условие обратимости для прямой? Прямая задается
двумя точками |
А е Ел |
и |
В е £ „ , |
А Ф В. Те же к |
операций проециро |
|
вания породят на П2 |
к |
образов прямых /т"В', для которых будет со |
||||
блюдаться |
проективное |
соответствие |
точечных |
рядов: |
||
(А,В,С,...)л(А',В',С,...), i |
= |
l, |
к. Следовательно, на |
П2 будут |
||
|
|
|
|
41 |
|
|
порождаться проективные соответствия |
рядов (А |
,В ,С ,...)л |
|
л(А2 ,В2 ,С2 ,...)л... л(Ак ,Вк ,Ск,...). Но |
эти |
проективные |
соответст |
вия будут служить моделью прямой |
АВ в том случае, если будут из |
||
вестны по три точки из каждого точечного ряда. А наша конструкция
позволяет иметь на |
П2 только по две точки А' и В', так как |
S'„_3f]n2 = 0 - Таким |
образом, условие обратимости модели для пря |
мой не удовлетворяется. Следовательно, центры проецирования S'n_3
не могут выбираться в |
Еп |
произвольно, независимо друг от друга. |
|
||||||||||||||
|
Рассмотрим |
другой |
случай. |
|
Пусть |
{ ^ . , } с Р „ _ 2 с £ й . |
Тогда |
||||||||||
Р„_2Г)П2=0. |
Пусть |
выбрана |
точка |
ЛеЕ„, |
|
А^РП_^. |
Тогда |
||||||||||
(А, Рп_2\ - Рп_: |
|
и |
РП_ХГ\П2=ЬХ, |
ОеЦ. |
Имеем |
следующее: |
|||||||||||
(A, S'„.3) = |
PJ, |
2 с Р„ .,, |
|
Р1_2П Ц |
= А1 . |
|
Следовательно, |
А1 е L,, |
|||||||||
/ = 1,...,и-1. |
Моделью |
точки |
АеЕп |
на |
112 |
будет |
множество |
точек |
|||||||||
А' б L,. Проверим обратимость модели. Пусть произвольно |
заданы |
||||||||||||||||
точки |
|
А' € £ , ; |
/ = |
|
- 1 . |
|
Имеем |
[A\S'^3) = />п'_2 |
с Р„ |
,, |
|||||||
^ 2 0 ^ 2 = ^ . 3 ^ ^ - 1 , |
^ - з П ^ - 2 = ^ - 4 с : Р п |
|
.... |
Я , П С " 2 |
= |
||||||||||||
= £<, |
= |
/1 е |
|
. Таким |
образом, |
модель точки |
АеЕ„, |
представляю |
|||||||||
щая |
собой |
множество |
A' |
e i , , |
L, |
э 0 . i |
= l,,..,n-\, |
является обратимой |
|||||||||
для точки. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Проверим |
обратимость |
модели |
для |
|
прямой |
АВсЕп, |
|||||||||||
ABf}P„ : - 0 - |
Будем иметь: (А, В, С,...) л (А1, В',С',...), / |
= 1, . . . , « - 1 , |
|||||||||||||||
(A,B,C,-)A(Lf,Lf,!!{,...). |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Поскольку |
Ц*эО, |
|
i f a O , |
|
эО, |
|
то |
(Л1 ,5! ,С',...)л |
|||||||||
л(А~,В |
,С2,...)л...л(А"~},В"~1,С"~Л,...). |
|
Перспективное |
соответст |
|||||||||||||
вие точечных рядов задается двумя парами соответственных точек, поэтому получаемая модель обратима для прямой АВ. Из этого непо средственно следует, что модель обратима для двух пересекающихся прямых, т.е. - для плоскости, для трех пересекающихся в одной точке
прямых, т.е. - для 3-плоскости и т.д. |
|
|
|
|||
|
Изменим рассмотренную конструкцию таким образом, чтобы мо |
|||||
дель |
точки |
А |
представляла |
собой |
множество |
точек |
[ U ' j c / ^ a O l U |
|
\А"-2&И2\, А"-2е1л, |
i = l, |
. . . , « - 3 . Это |
означа- |
|
|
|
|
42 |
|
|
|
ет, что центры проецирования |
S'n_2 cz Р„^2, но S^_2 cztP„,2. Тогда для |
|||||||||||||||||||||
любой точки |
А е Еп, |
А& Рп_2 |
получим |
выбранную модель, |
которую |
|||||||||||||||||
проверим |
на обратимость. Для множества точек |
j^'jczL,, |
Lj э 0 по |
|||||||||||||||||||
лучим i подпространств Р„' _ 2 сР и _ ,, пересечением которых |
будет |
|||||||||||||||||||||
единственное |
подпространство |
Е2аРпА. Тогда |
E2f](^An'2 ,S",Z2) |
= |
||||||||||||||||||
= Е0 = А, |
Л е Рп л. Следовательно, модель обратима для точки. |
|
|
|||||||||||||||||||
|
Чтобы |
получить |
обратимость |
модели |
для |
прямой |
АВ, |
на |
||||||||||||||
плоскости |
П2 |
необходимо |
получить |
|
исключенную |
|
точку |
|||||||||||||||
О = Р„-2Г\П2, которая будет центром пучка прямых |
(Ц, |
Lf, |
L\ |
, |
...) |
л |
||||||||||||||||
л (А, В, С, ...), и исключенную прямую т = P„_.xf\ll2, |
которая будет |
|||||||||||||||||||||
носителем третьих точек проективных рядов |
{А"'2, |
В"~2, М" |
2, |
...) |
л |
|||||||||||||||||
(А, |
В, |
М, |
...), |
где М = АВ |
f]P„_x. При |
этом |
Оет. Прямая |
АВ с Е„, |
||||||||||||||
AB(Z.Pn2, |
будет |
иметь |
моделью |
|
соответственные |
точечные |
ряды |
|||||||||||||||
(А, |
В, |
С, |
..АлЩ', |
I», |
4', |
...), |
|
|
(А\ |
В\СХ, |
...) л (А2,В2,С\ |
•••) |
л |
|||||||||
X |
...л (А"'3, В"~\ |
С"-3, ...), |
|
(А, |
В, |
М, |
...)л |
(Ли_2, В"'2, |
М" |
2, ..,), |
||||||||||||
(А"~2,В"~2,МП-2, ... )л {AZ,B\M\ |
...), |
|
где |
М' = Л*В'Г\т, |
i = |
1, |
|
|||||||||||||||
п - 3. Это возможно в том случае, если центр |
S"Zl |
будет относитель |
||||||||||||||||||||
но |
Р„_2 |
не |
в |
общем |
положении, |
а |
|
в |
частном. |
Именно, |
||||||||||||
SnJ\\P„.2 |
= |
S"„-J. |
Тогда (s"n:lPn_2) |
= |
Pn_x. |
|
|
|
|
|
|
|
|
|
|
|||||||
|
Пусть |
модель |
точки |
|
А |
представляет |
|
собой |
множество |
|||||||||||||
[A1 |
cLx |
эО] |
IJ |
К'- 4 |
е Л 2 , / |
3 |
е Я 2 ] , |
А"~4 eLx, |
|
А П Ы Ц , |
|
/ |
= 1, |
|
|
|||||||
n - 5. Рассуждая аналогично, можно доказать ее обратимость. |
|
|
|
|||||||||||||||||||
|
Моделью |
прямой |
АВ с Ел, АВ <Х Рп2 |
будут |
па |
|
П2 |
соответст |
||||||||||||||
венные точечные ряды, аналогичные приведенным выше. Однако
центры 5^Г3 |
и 5*^ J должны быть не в общем положении относитель- |
|||||
но |
и |
относительно друг друга, а - в частном. А именно, |
||||
необходимо, |
чтобы |
S"Z$ П Р„ |
г - |
> |
s"-l\\Pn-2 ~ |
|
[S"Z*,Р„-2) |
= |
(Зп-1>рп-г) = |
Рп-\ - в э т о м |
слУчае |
модель будет обрати |
|
ма для прямой.
43
Продолжая этот процесс, мы придем к выводу, что вес центры
проецирования о„_3, i = l, должны принадлежать гиперплоско
сти Рп_{ пространства # я .
Пусть пространство Еп нечетномерно: « = 3,5,7,.... Тогда усло вие расположения центров проецирования {S'n 3} с Рп_2 с Еп, i = 1,..., п-1, порождает обратимую модель на плоскости П2 • Доказательство этому будет аналогично доказательству в случае четномерного про странства.
Выводя из подпространства Рп_2 |
центры S'n_3 один за другим, |
|
получим модель, состоящую из точек |
[{А'\ с Ll,Ll э 0] (J |
[А' е / / , ] , |
А> г А,, 0 = Р я _ 2 П Я 2 , £ , = Р И . , П ^ 2 - |
|
|
Существование гиперплоскости |
необходимо для |
выполне |
ния условия проективности точечных рядов при получении модели
прямой |
пространства |
Е„. В конечном итоге будут получены точки |
|
|
п-1 |
|
|
А' е Я : , |
j = 1, |
и прямая |
с Я ; , L, эО. Центры проекций |
5,',..3 и Рп 2 должны располагаться в одной гиперплоскости Р„_,. Подробное исследование таких конструкций выходит за рамки
настоящей книги. Поэтому рассмотрим более подробно только одну из них, а именно ту, у которой [S'n_~} с: Рп_2 с Еп, и независимо от размерности пространства.
Пусть в пространстве Еп задана декартова система координат Оххх2...хп. Пусть плоскость проекций Я, совпадает с плоскостью Оххх2. Тогда оси 0х(, / = 3,...,«, будут перпендикулярны плоскости Я2 = Оххх2. Пусть проецирование на Я2 будет ортогональным. Тогда центры проецирований S'n_2 должны быть бесконечно удаленными и должны принадлежать (я - 2)-плоскостям в следующем порядке:
S^3 |
с:<9л3...х„, |
|
5„'_з |
с Ох2х4 |
' |
б1^'^ |
с О ь ^ Х |
/ . . . ! . . |
Эти центры порождают следующие проекции:
Лр51,« ( А ) = Л е 0xix2 = п \ ,
п-Ъ
Пр 2^А) = А2еОх1х3=П2,
Up 3/а (А) = А3е ОхххА = II3,
'V-3
Л/Vi,» (4) = Л-1 е <?*л = •
«-3
Поскольку все эти проекции двумерны, то обозначать размер ность нижним индексом нет смысла. Поэтому, следуя традиции, ниж ний индекс будет обозначать порядковый номер проекций.
Так как у всех проекций есть общая ось Ох,, то плоскости П2,....,П„-\ можно развернуть вокруг оси Ох{ на 90° до совпадения с плоскостью проекций /У,. Тогда оси Ох2,Ох3,...,Ох„_1 совпадут. Та ким образом, модель пространства будет иметь две оси: ось Ох, и перпендикулярную ей ось Ох2 = Ох3 = ... = Ох„.л.
2.2.Аксиоматические модели пространства Ен
Из того, что было изложено в п.п. 2.1, следует, что в пространст ве Е„ должны быть выделены два исключенных подпространства Р„_2 и Рп-\ > Л>-2 с Р „ ,. Построенные конструкции позволяют моде лировать все пространство Еп, кроме этих двух подпространств. Это пе означает, что на плоскости проекций нет образов, моделирующих Pn_i и Р„_х. Просто изучение этих образов есть предмет серьезного научного исследования и не является нашей задачей. Поэтому, в дан
ном случае, будем считать, что все точки подпространств Pn 2 |
и Р„_, |
||||
являются исключенными. |
|
|
|
||
|
На плоскости проекций П2 будут |
существовать два исключен |
|||
ных |
элемента: точка |
Р = |
Pn..2С\П2 и |
прямая I = РП_ХГ)П2, |
Pel. В |
силу |
приведенных в |
п.п. |
2.1 условий |
подпространства Рп^2 |
и Рп_{ |
могут быть выбраны произвольно. Это означает, что исключенные точка Р е П2 и прямая / е II2 тоже могут быть выбраны произволь ны. Таким образом, модель пространства Е„, построенная без конст- ,v руктивной связи с Еп, будет называться аксиоматической моделью.
45
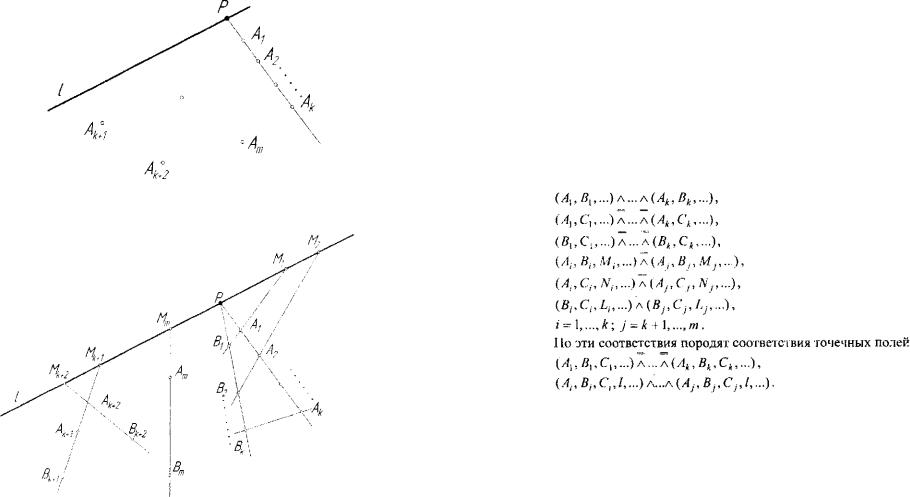
Ее общий вид для точки А е Е„, А <£ РпЛ представлен на рисунке 2.1, где к + 1 + 2т = п. На рисунке 2.2 приведена модель прямой АВ е Е„, АВаР„л.
Рис. 2.1. Аксиоматическая модель пространства Еп
Рис. 2.2. Модель прямой АВ пространства Еп
Модель прямой АВ включает в себя условия перспективного и проективного соответствия точечных рядов:
(А1,Ви...)л(А1,В2,...)л...л(АК,ВК,...)> |
|
|
||
(Ai,Bi,MI,...)A(AJ,Bj,Mj,...), |
|
(2.1) |
||
i |
= l,...,k; j = |
k + \,...,m. |
|
|
Исходя из этого, можно доказать существование модели плоско |
||||
сти |
ABC с: Е„, |
АВС&Рп_л, |
модели 3-плоскости |
ABCD а Еп, |
ABCD от Рп_1 и так далее, вплоть до гиперплоскости пространства Е„. |
||||
Все 2-плоскости, 3-плоскости, |
гиперплоскости будем считать на |
|||
ходящимися в общем положении относительно проекционной систе мы, отображающей пространство Еп на плоскость.
Сначала покажем, что представляют собой модели перечислен ных подпространств, а потом подтвердим эти модели расчетом пара метров.
Пусть требуется построить модель 2-плоскости ABC. Будем иметь:
(2.2)
В последнем соответствии прямая / соответствует сама себе.
|
3—плоскость |
задается |
четверкой |
|
независимых |
точек |
||
(A, |
B,C,D,...), |
|
моделями |
которых |
являются |
(А}, |
А2,Ат), |
|
(BvB2,...,Bm), |
(CuC2,...,Cm),(Dl,D2,...,D,„). |
На |
плоскости |
модели |
||||
существуют особые точки Ох =02 =...-Ок |
- Р, Ок+] |
el, Ок+2 |
el, |
|||||
От |
el, по отношению к которым четверки |
точек |
Ai,Bj,Ci,Di |
лежат |
||||
на соответственных лучах.
Если 3-плоскость рассматривать как однопараметрическое мно- » жество (пучок) 2-плоскостей, то на плоскости модели будут сущест вовать однопараметрические множества проективных соответствий
46 |
47 |
|
точечных полей. Тогда произвольное множество точек |
(Е,,...,Ет) бу |
||
дет |
моделировать точку Ее Рп, |
но не принадлежащую |
гиперплоско |
сти |
(ABCD). А множество |
точек (E1A1B1C1D1)A(E2A2B2C2D2)A... |
|
л(Em Am Bm Cm Dm ) будет моделью точки Е, принадлежащей гиперп
лоскости (ABCD). |
|
|
И так далее. |
|
|
Размерность множества прямых пространства Еп |
равна 2(п-\). |
|
Задание элементов модели одной точки требует I + к + 2(т - к) пара |
||
метров, двух точек - соответственно |
2[1 + к + 2(т - к)] |
параметров. |
Следовательно, 2[1 + к + 2(т - к)] = 2и. |
Проективность |
прямолиней |
ных рядов задается двумя парами точек (третья лежит на исключен ной прямой / ) . Поэтому имеем 2п - 2 = 2(п -1).
Размерность множества плоскостей пространства Еп равна 3 ( я - 2 ) . Плоскость задается тремя точками, что на модели требует задания 3[1 + к + 2(т - it)] параметров. Проективное соответствие за дается тремя нарами точек, что требует задания 6 параметров, кото
рые необходимо |
вычесть |
из |
суммы |
параметров. |
Имеем |
З и - 6 = 3 ( и - 2 ) . |
|
|
|
|
|
Размерность |
множества |
3—плоскости |
пространства |
Е„ равна |
|
4 ( л - 3 ) . 3-плоскость задается четырьмя |
точками, что |
потребует |
|||
4[1 + к + 2{т - к)] |
параметров модели. Но модель 3-плоскости требует |
||||
задания любых двух проективных соответствий двух плоских полей, т.е. получим 4[1 + к + 2(т - к)] - 1 2 = 4и - 1 2 = 4(л - 3 ) .
И так далее.
Рассмотрим построение точки, принадлежащей заданному под пространству, используя для этого только модель пространства.
Предварительно выясним, сколько параметров можно задать произвольно. Прямая «-мерного пространства задается аналитически
системой линейных уравнений
f1(xl,x2) = О
J /2(*15*з) = °
Очевидно, что задание одного любого параметра х,,...,х„ позво ляет построить точку данной прямой.
2—плоскость и-мерного пространства аналитически задается сис темой линейных уравнений
J](xl> х2>хз) ~ О
^fn(x]'X2'Xn) ~®>
из которой видно, что произвольно можно задать любые два парамет ра.
Продолжая этот процесс, придем к выводу, что для задания точки к -плоскости произвольно можно задать к любых параметров.
Построение модели точки С, принадлежащей прямой АВ, осу ществляется на основе проективных соответствий (2.1). Для построе ния необходимо задать произвольно только один параметр, например,
задать |
прямую пучка (Р). Тогда получим к точек С, е е , С2 е е , |
||
С4 е е , |
а проективные соответствия позволят построить точки |
C/t+], |
|
Ст |
на прямых Ак+1Вк+и |
АтВт. |
|
Построение модели точки |
D, принадлежащей плоскости |
ЛВС, |
|
осуществляется следующим образом. Для построения необходимо за дать произвольно два параметра, например, задать прямую d пучка
(Р) |
и |
одну точку на ней D{€c/. |
Тогда |
проективные соответствия |
||
(2.2) позволят построить точки D2, |
D3, |
Dk+i |
и все остальные точ |
|||
ки |
Dk+2, |
Dm полей (Ak+2,Bkl2,Ck,3,l),..., |
(Ат,В„„Ст,1). |
|||
|
Построение |
модели точки |
Е, принадлежащей 3-плоскостп |
|||
ABCD, |
можно выполнить по следующему алгоритму. Для построения |
|||||
необходимо задать произвольно три параметра, например, задать
прямую е пучка ( Р ) , |
две |
точки |
на |
ней £, е е , Е2ее- Тогда проек |
||
тивные |
соответствия |
(с, d,е,/,...) |
л |
(Ck+l, Dk+), Ек+i,Мкл,,...) |
позво |
|
ляют |
выделить |
в |
иоле |
|
(Akn,Bku,Ck^,Dk^ul) |
подполе |
(Ак+1,Вк+1, Ек+\,1)- После этого можно перейти к задаче построения
точки Ek+lz(Ak+2,Bk^2,EM,l), |
Eme(Am,BmJ:m,l), т.е. к задаче |
на принадлежность точки плоскости. |
|
И так далее.
В качестве примера рассмотрим модель 3-плоскости ABCD пя тимерного пространства и построение принадлежащей ей точки Е. Пусть модель 3 -плоскости ABCD имеет вид (рис. 2.3):
0(а, Ь, с, d) - пучок прямых с центром О,
48 |
49 |