Материал: 1671
1.Кривая линия определяется как линия сечения поверхности плоскостью. Например, кривые второго порядка издревле определя лись греками как сечения кругового конуса различными плоскостями.
2.Кривая линия рассматривается как проекция (линейная: цен тральная, параллельная, ортогональная, или нелинейная: косая, окружностная, винтовая и др.) пространственной или плоской кривой линии на плоскость, например, центральные проекции окружности - это кривые второго порядка. Кривая может быть рассмотрена как вы рожденная проекция (след) поверхности на плоскости, например, окружностная проекция кругового тора на его осевую плоскость - две окружности.
3.Кривая линия определяется как геометрическое множество точек, подчиненных определенному метрическому условию. Напри мер, Евклид рассматривай конические сечения (эллипс, гипербола, парабола) как геометрические места точек, сохраняющихся постоян ное отношение расстояний от данной точки (фокуса) и от данной прямой (директрисы).
4.Кинематический способ. В этом случае плоская кривая рас сматривается как траектория движения точки по определенному зако ну. Например, циклоидальные кривые представляют собой траекто рии точки, жестко связанной с окружностью некоторого круга, кото рая катится без скольжения по окружности другого круга. Кинемати ческий способ образования кривых был положен Декартом в основу определения кривых методом координат. В кинематической геомет рии изучаются различные кинематические способы образования кри вых линий [8].
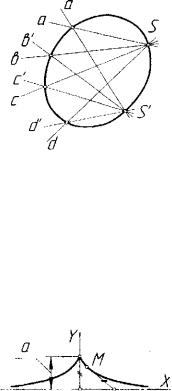
5.Кривая рассматривается как множество точек пересечения линий двух проективных пучков. Например, в проективной геометрии известна теорема Штейнера [10, 37], согласно которой кривая второго порядка представляет собой множество точек пересечения соответст вующих прямых двух проективных пучков прямых первого порядка (рис. 5.15), включая центры пучков. В частности, если угол в паре лу чей первого пучка равен углу в паре соответствующих им лучей вто рого пучка, то получаем проективное образование окружности, если
при этом вращение лучей в обоих проективных пучках имеет одно направление. Если вращение разное, то получаем гиперболу [37J. Кривая третьего порядка, применяемая в синтезе плоских механизмов [8], определяется как множество точек пересечения соответствующих элементов двух проективных пучков:
пучка прямых первого порядка и пучка кривых второго порядка. Два проек тивных пучка кривых второго порядка определяют кривую четвертого поряд ка и т.д., то есть кривые высших по рядков образуются при помощи проек тивных пучков кривых низших поряд ков.
6. Кривая определяется заданием ее дифференциально-геометрических свойств, то есть свойств, определяю щих геометрию кривой в матом. По
условию задачи составляется соотношение между бесконечно матыми элементами линии в виде дифференциального уравнения, после дующее интегрирование которого приводит к обычному уравнению кривой [29]. Например, трактриса представляет' собой кривую, у ко торой длина отрезка полукасательной есть постоянная величина а
(рис. 5.16). Изначальное дифференци альное уравнение этой кривой имеет
вид: |
у2-\\Н~)2]-а2=0. |
Из него |
|
dy |
|
ОР после интегрирования, параметриче
Рис. 5.16. Трактриса |
ской подстановки и исключения пара |
|
|
|
|
|
метра |
получается обычное уравнения |
кривой: х- а-1п- •V« -У |
|
У |
130 |
131 |

7.Кривая рассматривается как образ линии в заданном преобра зовании плоскости (аффинном, проективном, центральном нелиней ном и др.) [16]. Например, в квадратичном преобразовании плоскости образом прямой линии является кривая второго порядка [8, 16]; обра зом окружности в родстве является эллипс [37].
8.Кривая линия представляет собой график некоторой функции, которая может быть задана аналитически, то есть уравнением. На пример, к кривым, которые первоначально определялись уравнения
ми, |
относится декартов лист - трафик функции х3 + у3 - Заху - О |
(рис. |
5.7). |
5.1.5.Общие свойства плоских алгебраических кривых
Множеству уравнений, связывающих две переменные координа ты в декартовой системе координат, соответствует множество пло ских кривых. В зависимости от вида уравнения (алгебраическое или трансцендентное), записанного в декартовой системе координат, кри вые подразделяются на алгебраические и трансцендентные. В п. 1.6 было приведено общее уравнение кривой m—vo порядка. В теории плоских алгебраических кривых [16, 29] известны теоремы, опреде ляющие общие свойства этих кривых. Приведем основные из них.
1. Порядок алгебраической кривой не зависит от положения этой кривой относительно системы координат. Действительно. Урав нения преобразования системы координат, описывающих комбина
цию |
поворота |
и |
параллельного |
переноса, |
имеют |
вид: |
х = а1х1 |
+ bjyi + с,; |
у = а2хх + Ь2ух +с2, где |
X, у и х1( ух |
- соответст |
||
венно старые и новые координаты. Подстановка этих линейных урав нений в общее уравнение плоской алгебраической кривой (п. 1.6) не увеличивает и не уменьшает степень этого уравнения.
2. Алгебраическая кривая т-то порядка определяется заданием
m(m + 3)
ее точек. Несложное доказательство этого утверждения представлено в п. 1.6.
3. Две неприводимые алгебраические кривые порядков от, и т2
пересекаются не более чем в от,-от2 точках. Приводимой считается кривая, левая часть уравнения которой может быть представлена в
виде |
произведения алгебраических |
функций |
fx(x,y)• f2(x,у)•... = 0. |
|||||
В таком случае |
кривая |
представляется |
системой линий: |
fx(x,y) = 0, |
||||
f2 (х, у) = 0, ... В |
основу |
доказательства |
приведенной теоремы поло |
|||||
жена известная в алгебре теорема о числе корней системы |
из двух ал |
|||||||
гебраических уравнений степени т1 |
и |
т2. Если одна из линий явля |
||||||
ется |
прямой, например, |
т2-\, то |
от,-от2=от,, |
и порядок плоской |
||||
кривой представляет собой число точек се пересечения с прямой в плоскости кривой.
4. / -кратная точка алгебраической кривой эквивалентна зада-
нию — ~ — - простых ее точек. Помещая начало декартовой системы
координат в t -кратную точку, мы тем самым превращаем общее уравнение кривой (п. 1.6) т-го порядка в уравнение без последних t строк, поскольку только в этом случае t -кратная точка (х - 0,у = 0) будет превращать t раз уравнение кривой в тождество О е О . Оче-
t-(t + l)
видно, количество коэффициентов в этих t строках равно —- • - - .
Применительно к кривой 3-го порядка можно сделать вывод о том, что определяемая девятью простыми точками, она может быть опре делена также одной двойной и шестью простыми точками.
5. |
У неприводимой алгебраической кривой |
от-ro |
порядка может |
|||||||||||
|
|
|
( w - l ) - ( w - 2 ) |
„ |
_ |
. |
|
|
||||||
быть н е более |
|
|
|
- - двойных точек. |
Если |
б ы |
кривая имела, |
|||||||
|
|
|
||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
||
|
|
|
(т-\)-(т-2) |
, |
|
|
|
|
|
|
||||
предположим, —- |
~ |
|
|
- + I |
двойных точек, то через эти точки и |
|||||||||
|
|
|||||||||||||
(т - 3) |
других точек этой кривой можно было бы провести, на осно |
|||||||||||||
вании |
теоремы |
2, |
другую |
алгебраическую |
кривую (от- 2) порядка. |
|||||||||
^ |
|
|
|
|
|
|
|
|
|
(от - 1) - (от - 2) |
||||
Это следует из |
того, что |
сумма |
точек |
|
|
|
|
\-\ + (т — 3) = |
||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
133 |
|
|
|
|
|
132
(m-2)-(m + i) |
определяет по теореме 2 кривую линию (ли - 2) по |
2 |
|
рядка. Но поскольку каждая двойная точка первой кривой считается как две точки ее пересечения с другой кривой, то получаем число то-
чек пересечения двух кривых, равное 2 • [ (т-1)-(т- |
2) |
+ 1] + (|и - 3 ) = |
2 |
|
|
= т • (т - 2) + ], что противоречит тому, что у кривых порядков т и
(т - 2) число общих точек по теореме 3 равно т-{т-2).
Алгебраические кривые классифицируются не только по их по
рядку, но и по классу и роду (жанру). Класс алгебраической кривой определяется степенью ее уравнения в тангенциальных координатах.
Пусть линия f(x,у) = 0 пересечена прямой u-x + v-y + \ = 0. Условие
совпадения двух точек ее пересечения с кривой, записанное в виде равенства, связывающего коэффициенты и и V, приводит к уравне
нию кривой в тангенциальных координатах U и |
V. Например, исклю |
||
чая из уравнений |
окружности х 2 + у 2 - 1 = 0 |
и прямой |
u-x + v- у + |
+ 1 = 0координату |
у , получим (и2 +v2)x* +2ux + (\-v2) - |
0. Условие |
|
касания прямой и окружности представляет собой равенство корней
этого |
квадратного |
уравнения, |
что |
приводит |
к |
равенству |
||
v • (1 - и" - v |
) - 0. Если выполнить исключение координаты х, то по |
|||||||
аналогичной |
схеме получим |
и2 • (1 -и2 |
- v2) = 0. Очевидно, в обоих |
|||||
случаях |
имеет место |
условие |
1 - гг |
- v 2 |
= 0 , которое |
и |
представляет |
|
собой тангенциальное уравнение окружности. Геометрически класс плоской кривой определяется числом касательных к кривой линии, проведенных из точки вне кривой. Порядок т и класс к плоской атгебраической кривой в общем случае не совпадают, лишь в случае кривой второго порядка имеет место т = к. Если принять обозначе ния: т - порядок кривой, к - класс кривой, d - число двойных то чек (узловых и изолированных), г - число точек возврата, t - число двойных касательных (прямых, касающихся кривой в двух точках), w - число точек перегиба, то между этими числовыми характеристика-
134
ми можно установить следующие соотношения, так называемые фор мулы Плюккера, полученные им в 1834 году:
к =- т • (т - 1) - 2d - Зг; т = к • (к -1) - 2/ - 3w; w = Зт • (т - 2) - 6d - 8r ; г = Зк • (к - 2) - Ы - 8w.
Род или жанр алгебраической кривой равен числу р, представ ляющим собой разность между наибольшим числом двойных точек, которые могут быть у кривой порядка W, и их фактическим числом у данной кривой. Род определяется следующим образом:
|
(m-l)-(m^)_drJk-l).(k-2)_t_w |
|
и |
2 |
2 |
Если кривая линия содержит наибольшее число двойных точек, возможных для кривой данного порядка, то она называется рацио нальной (кривая нулевого рода). Кривые этого типа обладают сле дующим важным свойством: координаты точки, совершающей пере мещение по такой кривой, могут быть выражены рациональными функциями некоторого параметра.
Важное теоретическое и практическое значение имеют цирку
лярные |
кривые. Если в уравнение |
окружности |
(х-а)~ |
+{у-Ь)2 - |
|||||
- R2 = 0 |
подставить координаты х - |
у = ~2-, где |
х{,х2,х3 - одно- |
||||||
|
|
|
|
х3 |
|
х3 |
|
|
|
родные |
декартовы |
координаты, |
то |
получим |
уравнение |
||||
(х, -ах3)2 +(x2-bx3)2 |
-R2x2 |
= 0 . |
Решая |
его |
совместно |
с |
уравнени |
||
ем несобственной |
прямой х3 |
= 0 плоскости этой |
кривой, получим |
||||||
точки: J, (1, /, 0) и J2 (1, - с, 0), где г2 = - 1 . Очевидно, координаты этих точек не зависят от коэффициентов в уравнении окружности. Поэто му можно ут верждать, что любая окружность в плоскости пересекает ее несобственную прямую в двух мнимых точках, которые назы ваются циклическими. Алгебраические кривые, проходящие через циклические точки, называются циркулярными. К циркулярным
относятся |
кривая |
Бурместера, |
характеризуемая |
уравнением |
(х2 + у2)-(тх + 1у)~1тху = 0. Если в |
это уравнение ввести однород- |
|||
135
ные |
координаты |
х = — , |
У - ~ , |
т о |
получим |
уравнение |
|||
|
|
х, |
|
х3 |
|
|
|
|
|
(х,2 + х22) • (/их, + /х2) - 1тхх • х2 • х3 |
= 0. Если |
в нем положить х3 |
- 0, |
||||||
— -к, |
то приходим |
к уравнению, |
из |
которого |
можно |
получить |
к: |
||
х\ |
|
|
|
|
|
|
|
|
|
(1 + к |
)-(Ы + т) = 0. |
Из уравнения |
следует: |
к, |
=i, к2 |
=-i, к3 =— |
|||
Следовательно, кривая Бурместера является циркулярной кривой. По скольку она третьего порядка, то в пересечении с окружностью обра зует шесть точек, из которых две точки - циклические, а четыре точки - вещественные. Кривые второго порядка могут быть получены цен тральным проецированием окружности на соответствующую каждой кривой плоскость. Центральным проецированием определенного се мейства циркулярных кривых m - го порядка на плоскость также можно получить любую кривую т-го порядка. Рациональные цирку лярные кривые нашли множественные практические применения. Папример, кривая Бурместера - в теории синтеза плоских механизмов, лемниската Бернулли - в профилировании лопаток турбин, теорети ческие профили Жуковского, Чаплыгина в авиастроении и др.
В завершении обзора способов образования плоских кривых от метим, что мир этих кривых бесконечно велик [29]. Гак, например, известно более 70 видов алгебраических кривых третьего порядка. Классификация кривых четвертого порядка связана с именем Варинга (1792 г.) и насчитывает 84551 кривых частных видов. Алгебраические кривые более высоких порядков изучены недостаточно и не имеют сколь-нибудь законченной их классификации. Многообразие плоских трансцендентных кривых также велико [29], но оно менее изучено в геометрии, по сравнению с алгебраическими кривыми, ввиду сложно сти их геометрической природы. Если исследования метрических свойств (кривизна, квадратура, спрямление) у трансцендентных кри вых выполнены достаточно основательно, то, например, проективные свойства этих линий не изучены. Нет достаточно удовлетворительной классификации трансцендентных кривых линий.
5.1.6.Кинематическая геометрия плоских кривых
Рассмотрим подробнее упомянутый ранее кинематический спо соб образования плоских кривых. В основу одного из применяемых в начертательной геометрии методов преобразований - метода плоско параллельного перемещения, положено предложение о том, что вся кое перемещение плоской фигуры в ее плоскости из одного конечного положения в другое конечное положение может быть достигнуто по воротом фигуры относительно некоторого центра в этой плоскости. Это предложение имеет место и для бесконечно малого перемещения плоской фигуры в ее плоскости. В этом случае траекторией любой точки плоской фигуры является бесконечно малая дуга окружности и с точностью первого порядка малости бесконечно малое перемещение этой точки может быть заменено перемещением по касательной к бесконечно малой дуге, а перпендикуляр к касательной в этой точке занимает положение нормали. Точка пересечения подобных норма лей, каждая их которых определяется траекторией мгновенного пере мещения соответствующей точки плоской фигуры при ее мгновенном плоскопараллельном перемещении, является мгновенным центром вращения плоской фигуры. Множество мгновенных центров враще ния плоской фигуры в неподвижной декартовой системе координат в плоскости фигуры представляет собой кривую - неподвижную цен троиду движения плоской фигуры. Множество мгновенных центров вращения в подвижной системе декартовых координат, неизменно связанной с подвижной плоской фигурой, представляет собой под вижную центроиду. Точка, неизменно связанная с фигурой, совер шающей непрерывное плоскопараллельное перемещение, описывает некоторую плоскую кривую. Эту кривую можно рассматривать также как образованную той же точкой, неизменно связанной с подвижной центроидой, при качении без скольжения последней по неподвижной центроиде. Кривые описанной кинематической схемы образования называются рулеттами [2, 8].
136 |
137 |
|
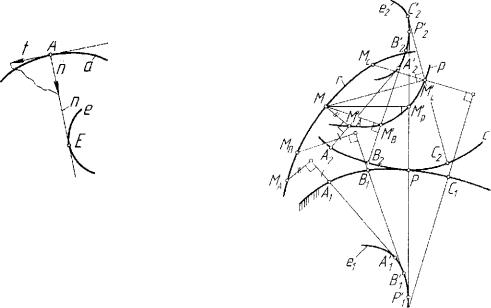
В свете сказанного рассмотрим в качестве примера кинематиче ское образование эволюты плоской кривой (рис. 5.17). В каждой обыкновенной точке А кривой а су ществует репер Френе, образованный
единичными векторами касательной t и нормали п. Рассматривая репер как плоскую фигуру, совершающую не прерывное плоскопараллельнос пере мещение при движении его вершины
Авдоль линии а, на основании вы
шеизложенного можно сделать вывод о |
Рис. 5.17. Эволюта - |
том, что мгновенным центром враще- |
неподвижная центроида |
ния репера при смещении его из точки |
А служит точка Е эволюты е |
кривой О.. Следовательно, неподвижной центроидой непрерывного плоскопараллельного перемещения репера кривой служит ее эволюта. Очевидно, подвижной центроидой движения репера служит нормаль ная прямая п. В таком случае кривая линия а представляет собой траекторию движения точки А, неизменно принадлежащей прямой линии т?, когда, последняя обкатывает кривую е, то есть линия а есть рулетта точки А, принадлежащей подвижной центроиде п, обкаты вающей неподвижную центроиду е. Это как раз соответствует ранее изложенному кинематическому образованию эвольвенты а по ее эволюте е.
Рассмотрим образование рулетты. Для получения рулетты необ
ходимо, как следует из вышесказанного, задать неподвижную цен
троиду сх, подвижную центроиду с2 и точку М, образующую рулет-
ту. Точка М неизменно связана с подвижной центроидой с2
(рис. 5.18). Центроиду сх представим как дискретный ряд точек
Ах, Вх, Р,СХ,..., которому отвечает по условию равенства длин соот
ветствующих |
дуг центроид сх и |
с2 ряд точек А2,В2,Р, С2,..., то |
|
есть |
= |
А$2, В11*=Ё21Р,Рс:х |
=РС2, ... |
|
|
|
138 |
|
|
Для |
каждого ряда |
точек |
||||||
|
|
на линиях сх и с2 проведем |
||||||||
|
|
их |
нормали, |
огибающими |
||||||
|
|
которых |
являются |
эволюты |
||||||
|
|
ех и |
е2. Из точки |
М |
|
опус- |
||||
|
|
тим перпендикуляр |
на |
нор |
||||||
|
|
мали |
|
центроиды |
с2, |
осно |
||||
|
-2 |
вания |
|
которых |
М'А,М'В, |
|||||
|
|
|
||||||||
|
|
М'р , |
М'с |
, ... |
|
принадлежат |
||||
|
|
линии |
р |
подере |
эволюты |
|||||
|
|
е2. На нормалях неподвиж |
||||||||
|
|
ной |
центроиды |
с*| |
отложим |
|||||
|
|
отрезки, |
измеренные |
на со |
||||||
|
|
ответствующих |
|
нормалях |
||||||
|
|
подвижной |
центроиды |
с2 |
||||||
' |
|
между |
линиями |
р |
и |
с2 , за- |
||||
|
|
тем |
к |
полученным |
точкам |
|||||
|
|
добавим |
под |
прямым |
углом |
|||||
Рис. 5.18. Схема образования рулетга |
|
отрезки |
соответствующих |
|||||||
|
|
перпендикуляров, |
измерен |
|||||||
ные от точки М до оснований построенных перпендикуляров к нор малям центроиды с2. Множество полученных точек принадлежит ру-
летте г. Очевидно, по характеру построения рулетга г принадлежит неподвижной плоскости центроиды с{.
Рассмотрим теперь вопрос определения кривизны рулетты. Пусть
точка М |
образует рулетту г |
при качении подвижной центроиды с2 |
|||
по неподвижной сх (рис. 5.19). Пусть точка МА |
е г бесконечно близ |
||||
ко расположена к начальной |
точке |
М е г и ей |
соответствуют точки |
||
.4, е с, и |
А2 е с2 касания центроид |
сх и с2, бесконечно близко распо |
|||
ложенные к начальной точке |
Р |
касания центроид. Введем обозначе |
|||
ния углов: а = пР л пм - угол |
между нормалью |
пм рулетты г, про- |
|||
|
|
|
139 |
|
|