Материал: 1671
ходящей через полюс |
Р |
и общей |
нормалью пР центроид в точке |
||||
их касания |
- |
полюсе |
Р; |
ух~ пР л пАХ |
и у2 = пР л пЛ2 - углы между |
||
нормалями |
подвижной |
и не |
|
||||
подвижной |
|
|
|
центроид; |
|
||
S — пм л МА2 |
|
|
|
|
и |
|
|
В = МА2 л пА2 |
- |
углы, |
обра |
|
|||
зуемые прямой МА2 |
с норма |
|
|||||
лью пм рулет ты |
и |
нормалью |
|
||||
п,12 подвижной центроиды с2
;<р - пм лпА - угол между бесконечно близко располо женными нормалями рулетты. Отрезок МА2 становится отрезком нормали пл, то есть
МА-, |
- М ААХ, когда центрои |
|||
ды с, |
и с2 касаются в |
точке |
||
АХ=А2. Из геометрической |
||||
схемы |
следуют |
равенства: |
||
<р + в = ух+а, |
а + 5 = |
В + у2. |
||
Оба |
равенства |
дают |
одно: |
|
(р + 5 = ух + у2. |
Введем |
обо |
||
значение: |
As - АХР = А2Р |
- |
Рис. 5.19. Схема определения |
||||||
|
|
|
|
|
|
||||
равные бесконечно малые ду- |
|
кривизны рулетты г |
|
||||||
ги центроид |
с, |
и с2. |
Разделим полученное равенство сумм углов на |
||||||
As |
|
и |
|
перейдем |
|
к |
пределам: |
||
Urn |
lim |
6 |
lim |
Yx + lim -^- = — + - L , где R, и R2 |
• радиусы |
||||
As^oA? |
AS~>O As |
As-+o As |
A< - »D A S R, |
R- |
|
|
|||
кривизны центроид в точке их касания |
Р. Поскольку (р и sin <р - эк |
||||||||
вивалентные |
|
бесконечно |
|
малые, |
то |
можно |
записать |
||
,.Ф .. simp
lim — = |
hm |
|
|
. Заменяя бесконечно малую дугу As стягивающей |
|
|
|||
л*-+о As |
д»->о |
As |
||
|
|
|
140 |
|
се хордой |
и |
рассматривая |
|
треугольник АРАхО, можно записать: |
|||||||
|
|
sine? |
,. |
sm( |
ZOPA,) |
cos а |
„ |
||||
lim |
|
|
— = lim |
|
|
— = |
|
. Поясним полученные равенства. |
|||
|
|
|
|
|
|||||||
•\s->o |
As |
л*н>о |
QAX |
|
POM |
|
|||||
11ервое равенство следует из теоремы синусов для треугольника. Вто
рое равенство следует из того, что |
в пределе секущая АХР занимает |
||||||||||||||||||
положение касательной |
t |
в точке |
Р касания центроид. Угол ZOPAx |
||||||||||||||||
стремится при Д ? - » 0 к углу |
90—а, |
точка |
Л, |
стремиться к точке Р, |
|||||||||||||||
а точка О - к центру Ом |
кривизны рулетты |
г |
в ее точке М . |
|
|
||||||||||||||
Аналогичным |
образом, |
из |
рассмотрения |
АРМА2 |
следует: |
||||||||||||||
S |
,. |
|
|
sin 5 |
,. |
|
sm(ZMPA2) |
cos or |
„ |
_ |
|
|
|||||||
hm —- = |
hm |
|
|
= lim —^ |
|
|
|
— = |
|
|
|
. Таким образом, |
окон- |
||||||
|
|
|
|
|
|
|
|
||||||||||||
Л<!->0 As |
As-»0 |
As |
As->0 |
|
|
MA2 |
|
|
MP |
|
|
|
|
|
|||||
чательно |
|
|
|
полагаем |
|
известную |
формулу |
Эйлера |
[8]: |
||||||||||
cos«( —- |
|
|
h —) = — + |
* |
, |
|
где MP + РОм = RM |
- радиус |
кривизны |
||||||||||
|
|
|
|||||||||||||||||
POfyi |
MP |
Rx |
R2 |
|
|
|
|
|
|
|
|
|
|
||||||
рулетты в ее точке |
М . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
В каждый момент времени касания центроид с, и с2 существуют
точки, связанные с подвижной центроидой, рулетты которых имеют нулевую кривизну, то есть для них выполняется условие РОм = =о. Множество таких точек представляет собой окружность, диаметр d которой, на основании формулы Эйлера, удовлетворяет соотношению
— = -- |
+ ^ . Положение точек этой окружности относительно полю- |
|||
d |
Rx |
R2 |
|
|
са |
Р |
определяется отрезком |
PM — d-cosa. Они |
являются точками |
распрямления своих рулетт [8]. |
|
|
||
|
I [усть заданы подвижная с2 |
и неподвижная с, |
центроиды и неко |
|
торая линия а2, жестко связанная с центроидой с2. При качении без скольжения центроиды с2 по центроиде с, линия а2 будет переме щаться, образуя непрерывное однопараметрическое множество линий
{а2}. Огибающей множества {а2 } будет некоторая линия аг, которая по аналогии с траекторией движущейся точки, неизменно связанной
141
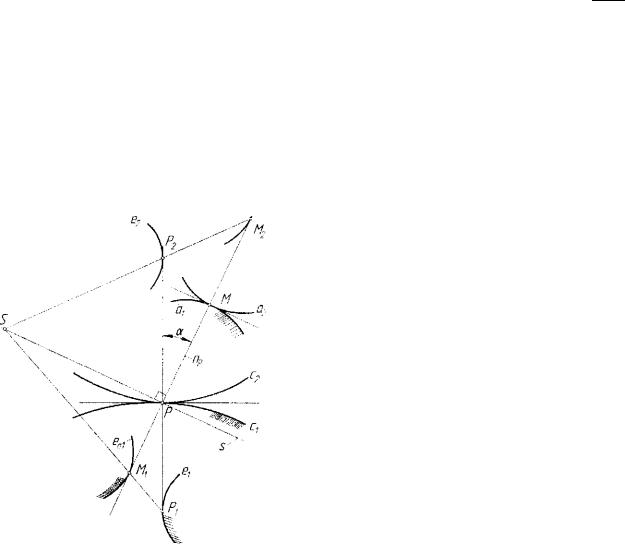
с подвижной центроидой с2, может быть названа неподвижной рулеттой, поскольку она неизменно связана с неподвижной центроидой
с,. Если центроиды с2 и с} |
поменять "ролями", то есть считать не |
|||||||||
подвижной с2, а подвижной |
сх, с которой жестко связана линия |
а,, то |
||||||||
в результате |
обкатывания центроиды сх по центроиде с2 получим |
|||||||||
огибающую |
непрерывного |
однопараметрического |
множества |
ли |
||||||
ний |
{а,}, |
которой |
будет линия |
- рулетга а2. Таким |
образом, |
в ис |
||||
ходном положении, когда сх |
и с2 |
суть соответственно неподвижная и |
||||||||
подвижная |
|
центрои |
|
|
|
|
||||
ды, линии ах и а2 бу |
|
|
|
|
||||||
дут |
называться |
со |
|
|
|
|
||||
пряженными, |
то |
есть |
|
|
|
|
||||
взаимоогибаемыми |
|
|
|
|
|
|||||
рулеттами, |
одна |
|
из |
|
|
|
|
|||
которых а{ - непод |
|
|
|
|
||||||
вижная, |
а другая |
а2 |
- |
|
|
|
|
|||
подвижная |
|
рулетты |
|
|
|
|
||||
[81. |
|
|
|
|
|
|
|
|
|
|
|
Пусть |
с |
центрои |
|
|
|
|
|||
дами с, и с2 связаны |
|
|
|
|
||||||
сопряженные |
рулетты |
|
|
|
|
|||||
ах и а2 (рис. 5.20). |
|
|
|
|
||||||
Для |
кривизны непод |
|
|
|
|
|||||
вижной |
рулетты |
а, |
в |
|
|
|
|
|||
ее точке |
М имеет ме |
|
|
|
|
|||||
сто |
вышеприведенная |
|
|
|
|
|||||
формула |
Эйлера, |
ко |
|
|
|
|
||||
торую можно |
преоб |
|
|
|
|
|||||
разовать, |
приняв |
сле |
Рис. 5.20. Построения Бобилье |
|
||||||
дующие |
обозначения: |
|
||||||||
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
142 |
|
|
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
|
, |
|
|
—i |
|
= —; |
|
= |
= |
; |
|
- — , где |
a |
- диаметр окружно- |
|
R{ |
R2 |
|
d POM |
PMX |
Wj |
|
MP |
m |
|
|
|
сти, состоящей из точек распрямления рулетт. С учетом принятых обозначений формула Эйлера принимает вид (— + —) • cos а- — , из
|
|
|
тх т |
d |
|
тн • d ~ cos ct |
|
||
которого следует формула тх = |
|
|
, в которой параметры тх |
|
|
|
|||
|
т- d -cosor |
|
||
и т связаны дробно - линейным |
соотношением. В |
соответствии с |
||
обозначениями на рисунке 5.20 эти параметры представляют собой длины отрезков тх - РМХ; т = РМ. Таким образом, при неизменных центроидах с, и с2, и неизменном положении прямой пР - общей нормали сопряженных рулетт, проходящей через полюс Р - точку касания центроид с, и с2, точечному ряду {А/}, представляющему собой однопараметрическое множество точек касания всевозможных
рулетт а, и а2 на прямой пг, |
соответствует точечный |
ряд {Мх} |
ряд центров кривизны рулетты |
ах, на той же прямой пР. |
Это соответ |
ствие как раз и определяется вышеприведенными дробно—линейными соотношениями. Из проективной геометрии известно, что в этом слу чае соответствие рядов {м}апг и [ W | } c » P является проективным [10, 37]. Из дробно-линейного соотношения следует, что точка Р яв
ляется |
в этом соответствии двойной, так |
как |
при т = 0 получаем |
т{ = 0 . |
Очевидно, между рядами {M}cznP |
и |
{М2}спР также суще |
ствует проективное соответствие, следовательно, проективное соот ветствие существует и между рядами {Му} и {М2}, и точка Р являет ся двойной, то есть самосоответствснной в проективном соответствии этих рядов. Очевидно, пучок прямых (Fj), проецирующий ряд {М,}, и пучок прямых (Р2), проецирующий ряд {М2}, проективны, по скольку проективны ряды, которые проецируют эти пучки [10, 37]. Поскольку точка Р является двойной в проективном соответствии рядов {Mj} И {М0}, ТО двойной будет и прямая РхР2, соединяющая центры проективных пучков прямых, то есть она соответствует сама
себе. В этом случае, как известно [10, 37], проективные пучки прямых
143
(Р,) и (Р2) перспективны, то есть их соответственные лучи пересе каются в точках на оси перспективы. Из теоремы Бобилье следует, что осью перспективы служит прямая SPA.PM [8]. Из сказанного следует, что центры кривизны центроид с,, с2 и центры кривизны со пряженных рулетт а, и а2 связаны конструктивно простым построе нием Бобилье, которое позволяет при заданных центроидах и одной из рулетт в их контактном положении (М - точка контакта) опреде лить кривизну другой рулетты в ее отсутствие. Например, требуется
определить при |
указанных |
данных |
кривизну рулетты о 2 . Необходи |
|||
мые |
построения |
выполняются в |
следующей |
последовательности: |
||
sLrip, |
P-^MjClx = S, SP2[\nP - M2, |
M2 - искомый центр |
кривизны |
|||
рулетты а2. |
|
|
|
|
|
|
Построение |
Бобилье |
позволяет получить |
известную |
в теории |
||
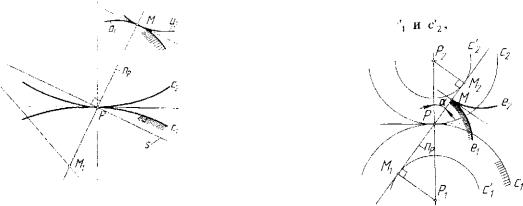
плоских зубчатых зацеплений формулу Эйлера-Савари. Введем сле
дующие |
обозначения |
|
|
|
|||||
(рис. 5.21): |
\1М. |
Л" - |
|
|
* ^ Л А |
||||
радиус кривизны нспод- |
|
,р |
/ х \ |
||||||
вижной |
рулетты |
а,, |
|
|
/ |
||||
\f.\t • = R" |
- |
радиус |
|
j \ |
/ |
||||
кривизны |
подвижной |
S |
|
|
|||||
рулетты |
а2; |
РМ=т. |
|
|
|||||
|
|
|
|||||||
|
В таком |
случае |
по |
\ |
|
|
|||
лучаем |
РМ2 |
=т + R", |
|
|
|||||
|
|
|
|||||||
РМХ |
= |
R'-m. |
Поскольку |
|
|
|
|||
геометрическая схема на |
|
|
|
||||||
рисунке |
5.21 |
|
отражает |
|
|
|
|||
геометрическую |
карти |
|
|
|
|||||
ну мгновенного |
состоя- |
/ |
\ |
|
|||||
|
|
|
|
|
|
\ |
|
||
ния, |
то |
вполне |
возмож |
|
|
|
|||
ны |
замены |
подвижной |
Рис. 5.21. Схема вывода |
||||||
рулетты |
а2 ее |
центром |
|||||||
уравнения Эйлера-Савари |
|||||||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
144 |
|
|
|
кривизны |
М 2 , а неподвижной рулетты |
линией а\, описываемой |
|
центром кривизны М2 при огибании подвижной рулетты а2 |
непод |
||
вижной сг, |
в процессе обкатывания подвижной центроиды с2 |
по не |
|
подвижной |
С ] . В таком случае точка М2 |
может быть принята в каче |
|
стве подвижной точки, неизменно связанной с центроидой с2 и опи сывающей рулетту а\. Применяя на этом основании ранее приведен ную формулу Эйлера, получим:
|
' i |
1 |
|
1 Ч |
1 |
1 |
-и |
1 |
|
|
|
1 |
|
|||
|
cosa( |
|
|
+ |
|
) = — или же —— + |
|
|
|
= |
|
|
. |
|||
|
|
|
|
|
|
|
|
|
||||||||
|
|
РМ, |
М~,Р |
d |
R-m |
|
m+R" |
|
|
dcosa |
||||||
Последнее выражение представляет собой известную формулу |
||||||||||||||||
Эйлера-Савари [8]. Очевидно, схема на рисунке |
5.21 позволяет гео |
|||||||||||||||
метрическими построениями определить кривизну рулетга |
а\ в дан |
|||||||||||||||
ной ее |
точке |
М2. |
Последовательность |
построений следующая: |
||||||||||||
s ±РМ2, |
MzP2[)s |
= S, |
SPx0,nP |
= М,, |
М, - |
искомый |
центр |
кривизны |
||||||||
рулетты и\. Рассмотрим пример применения формулы ЭйлераСавари. Предположим, что с, и с2 - неподвижная и подвижная цен троиды радиусов К, и R2 соответственно (рис. 5.22). Проведем через
полюс |
Р |
наклонную прямую |
пР |
под углом а и построим две окруж |
ности |
с |
касающиеся |
этой |
прямой. Для любой точки М е п р |
Рис. 5.22. Сопряженные рулетты цилиндрической зубчатой передачи
построим эвольвенты е{ и е2 окружно стей с'| и с\ соответственно. Пока жем, что эвольвенты ел и е2 могутбыть приняты в качестве сопряженных рулетт, то есть для них выполняется формула Эйлера-Савари. Для элемен тов этой формулы, в соответствии с
рисунками |
5.22, |
можно |
записать: |
|
MM 2 |
=R", |
РМ=т, |
ММХ |
=R'. В та |
ком |
случае |
п о у ч а е м : РМ2 =m + R" = |
||
= P 2 - c o s « ; |
РМ} = R'-m - Rx - c o s а . |
|||
Окончательно, можно записать:
145
i _ + |
|
1 |
|
] _ |
Д |
( 1 , 1 ) = |
1 |
|
Л'-/?г |
|
|
|
|
|
|
|
|
m+R" |
Rycosa R2cosa |
cos a |
Rt R2 |
J cos a |
||||
Этим примером Л. Эйлер в 1767 г. впервые обосновал возможность использования эвольвенты окружности в качестве профилей зубьев цилиндрической прямозубой зубчатой передачи с параллельными осями колес.
5. /. 7. Касание кривых (элементы дифференциальной геометрии)
Довольно часто в результате выполнения теоретического иссле дования либо эксперимента получается массив точек на плоскости и возникает задача проведения линии через упорядоченный массив то чек либо линии через определенные точки с заданными в них допол нительными условиями: положением касательной прямой, значением кривизны и др. Кроме того, иногда требуется заменить заданную ли нию другой линией по определенным условиям замены. Подобные задачи относятся к задачам аппроксимации, то есть когда требуемся заменить одну функцию, заданную массивом точек, графически либо уравнением, другой функцией, удовлетворяющей определенным ус ловиям. Известны следующие основные методы аппроксимации функции [15, 18]:
1. Интерполирование, когда требуется провести кривую через определенные точки исходной кривой;
2. Приближение функций, когда исходная функция на множест ве ее точек заменяется другой функцией с использованием опреде ленного критерия приближения, например, минимизация суммы квадратов отклонений аппроксимирующих и исходных значений
функции: Ziy'i^ Уаппрок)2 = т ' п ;
/=1
3. Построение обвода, представляющего собой составную кри вую, используемую в качестве аппроксимирующей линии, при этом под обводом понимается линия, составленная из дуг кривых одного или различных видов, в точках стыковки которых должен быть вы держан определенный порядок гладкости (порядок касания).
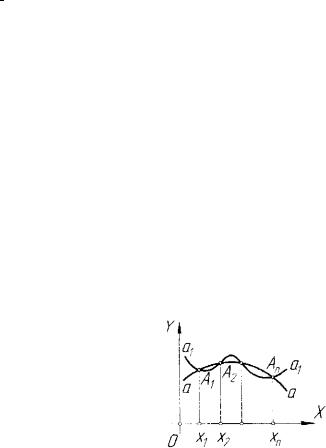
Рассмотрим основные положения теории касания плоских кри вых, известной в дифференциальной геометрии [26] и ее приложениях |8], с точки зрения их практического применения. Пусть имеем две
У |
|
|
|
кривые |
а |
и |
ах |
с |
общей |
точкой |
А0 |
|||||||
|
|
|
(рис. 5.23), уравнения которых следую |
|||||||||||||||
|
|
А,о |
|
|||||||||||||||
|
|
|
щие: |
у |
= f(x) |
- |
для кривой |
а, |
у = |
fx(x) |
||||||||
|
|
|
|
|
||||||||||||||
|
|
|
а, |
|
- для кривой ах. В соответствии с теори |
|||||||||||||
|
|
|
|
ей касания кривых, необходимым и дос |
||||||||||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
X |
таточным условием касания не ниже |
п — |
||||||||||||
|
|
|
|
|
||||||||||||||
о |
|
|
|
го |
порядка |
кривых |
а |
и ах |
в их |
общей |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 5.23. Касание кривых |
|
точке |
Ад [х0 |
; у0 |
= Д х 0 ) = fx (х0)] |
являет |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
ся совпадение |
производных |
в |
|
этой |
|||||||||
точке: f(x0) |
|
= f\ ( х 0 ) ; / " ( * о ) |
= |
f\ |
(x0); |
..-.fix,) |
= /,"(*„)• |
|
|
|
||||||||
|
Пусть на плоскости задано множество кривых |
(я,}, описываемое |
||||||||||||||||
уравнением |
|
у = fx(x\с,,с2,...,сп). |
На |
|
кривой |
а |
выберем |
|
п |
точек: |
||||||||
Ах, А2,Ап. Подберем значения параметров |
|
сх,с2,...,с„ |
так, |
чтобы |
||||||||||||||
|
|
|
|
|
кривая |
я, множества |
{ах \ проходила че |
|||||||||||
|
|
|
|
|
рез эти п точек (рис. 5.24). Эти значения |
|||||||||||||
|
|
|
|
|
,.(1) |
J2) |
|
|
параметров определяют |
|||||||||
|
|
|
|
|
1 |
' |
2 |
' ., с„ ' |
||||||||||
|
|
|
|
|
ся |
|
из |
|
условий: |
/(х,) = / , (х,), |
||||||||
|
|
|
|
|
f(x2) = fx(x2), |
|
|
|
|
|
f(x„) = |
fl(x„). Вве |
||||||
|
|
|
|
|
дем |
|
в |
|
рассмотрение |
|
функцию |
|||||||
|
|
|
|
|
fi{x) = |
f(x)- |
/, (х). Так как имеют место |
|||||||||||
|
Рис. 5.24. Пересечение |
|
равенства |
|
/л(хх) |
- |
ju(x2) =... = |
fi(xn) |
= 0, |
|||||||||
|
кривых |
|
и |
функция |
/л(х) |
непрерывна на отрезке |
||||||||||||
|
|
|
|
|
||||||||||||||
[хх, хп] и дифференцируема в каждой внутренней точке этого отрезка,
поскольку эти условия выполняются для каждой из функций / ( х ) |
и |
|||||||
/ ( х , ) , |
то |
по |
теореме |
Ролля о |
корнях |
производной |
получим: |
|
|
|
,0) |
|
(0 |
где |
Х^ ^ Х-^ |
_Х"2 *С Х^ |
*^ |
|
|
|
|
|
||||
<...<х„ |
< |
х„ |
Применив |
теорему |
Ролля для |
функции / / ( х ) , полу- |
||
146 |
147 |
|
чим: |
M"(xi2)) = м"(х?)) = -=М"(х<1%) = °> |
гДе |
Х?У |
<*\2) |
< х 2 ° < |
|||||
< х[2) |
<...< х(2}2 < х л - 1 - |
И |
так |
далее. |
В |
итоге |
получаем: |
|||
^С-').(*(»-')) = 0> |
Где |
x1(и-2)<JcI(и-1)<xfл•^,. |
Устремим |
все |
точки |
|||||
/4,, Л 2 , к р и в о й |
а |
к ее точке |
А0(х0), то есть выполним предель |
|||||||
ный переход lim JC, |
= lim х2 |
- ... — lim хп - х0. В этом случае параметры |
||||||||
с\]\с21\...,с^ |
будут |
стремиться к |
своим предельным |
значениям |
||||||
с1(0),с2°\...,ся0) |
. В итоге отрезок |
со всеми |
своими точками бу |
|||||||
дет стягиваться в точку х0. В пределе для всех вышеприведенных
производных |
/и'(х), |
fi"(x), |
fj"~l{x) получим: |
fj'(x(]) = /j"(x0) = |
|
= ... - ju"~](x0), |
что |
соответствует |
необходимому |
и |
достаточному ус |
ловию касания не ниже (п -1)—го порядка кривых |
а |
и я , , также при |
|||
веденному выше. Из вышеизложенного следует важный результат о том, что две алгебраические кривые порядков тип могут иметь ме жду собой касание не выше ( W - W - I ) - J O порядка, поскольку по тео
реме Безу они пересекаются в (т-п) точках |
и, следовательно, любая |
из них может проходить не больше чем через |
{т-п) бесконечно близ |
ко расположенных точек другой. |
|
Рассмотрим примеры. |
|
1. Соприкасающаяся прямая. Пусть имеем прямую общего по |
|
ложения относительно декартовой системы |
координат в плоскости: |
у - с,х + с2. Так как п = 2, то соприкасающаяся прямая может иметь с |
|
кривой касание не ниже первого порядка. Прямая является касатель
ной к кривой у- f(x) в некоторой ее точке (х0,>>0). Действительно. с,х0 + с 2 - уп = f(x0); у'„ = Г (*о) = с\; с г = У о _ У'о 'хо • Таким обра
зом, получаем: у - у0'(х~ х0) + у0. Очевидно, что имеет |
место усло |
вие у"- О для рассматриваемой прямой. Точки кривой у |
- /(х), в ко |
торых / " ( х ) = 0, называются точками распрямления. В этих точках касательная к кривой проходит через три бесконечно близкие точки.
2.Соприкасающаяся окружность. Из уравнения окружности
(х-a)2 +(y-b)2 -R2 = 0 следует, что и = 3. Поэтому окружность с
148
кривой y~f(x) может иметь касание не ниже второго порядка. Из уравнения окружности можно получить последовательным диффс-
реш 1ированием |
следующие |
уравнения: |
(у~Ь)- у'+(х - а) = 0; |
|||||
(у - И) • .У"+(У )2 |
+ 1 = 0 . По приведенным выше необходимым и дос- |
|||||||
I аточным условиям касания не ниже (и - 1)-го порядка кривых в точ |
||||||||
ке |
(х0,У0) |
принимаем |
у = |
Дх0); у'=/'(х0); |
/ ' = / " ( > „ ) , |
где |
||
v |
= f(x) - уравнение некоторой |
кривой. Из |
трех |
приведенных |
урав |
|||
нений для окружности и |
уравнения кривой |
у = f(x) следуют уравне |
||||||
ния трех параметров окружности, соприкасающейся с кривой в точке
|
|
[] + ( y ) |
2 l v |
i + (V) |
2 |
„ |
[i + (/)2 ]3/2 |
„ |
|||
(x0,yQ): a = x- 1 |
|
КУ , |
1 |
• |
; в = у + —V -; |
R |
= |
.. |
' Если |
||
|
|
|
V |
|
|
У |
|
|
У |
|
|
у= f"(xn) = 0, |
то |
искомой |
окружности |
в |
точке |
(х0,у0) |
кривой |
||||
V = / ( х ) не |
существует, |
поскольку эта точка - точка распрямления |
|||||||||
кривой. |
|
|
|
|
|
|
|
|
|
|
|
Эти уравнения совпадают с известными уравнениями, опреде ляющими окружность кривизны кривой в некоторой ее точке (л\у). Таким образом, соприкасающаяся окружность является окружностью кривизны кривой линии. С другими кривыми второго порядка окруж ность пересекается в четырех действительных точках. Следовательно, на основании сделанного выше вывода о касании двух алгебраиче ских кривых, она не может иметь с ними касание выше третьего по рядка. В вершинах кривых второго порядка, в которых их кривизна достигает экстремума, соприкасающаяся окружность имеет касание третьего порядка, то есть она проходит через четыре бесконечно близко расположенные точки этих кривых.
3. Соприкасающаяся парабола. Пусть задана парабола с осью, параллельной оси OY: у = с, + с2х + с3х2. Очевидно, что /7 = 3. Сле довательно, такая парабола может иметь с кривой у - f(x) касание
не ниже второго порядка. Из уравнения параболы, соприкасающейся с кривой _у = f(x) в точке (х0,у0) можно получить следующие урав-
149