Материал: ТАУLAB
Количество входов и операция (сложение или вычитание) определяется списком знаков параметра List of sign, при этом метки входов обозначаются соответствующими знаками. В параметре List of sign можно также указать число входов блока. В этом случае все входы будут суммирующими.
Если количество входов блока превышает 3, то удобнее использовать блок Sum прямоугольной формы.
Блок может использоваться для суммирования скалярных, векторных или матричных сигналов. Типы суммируемых сигналов должны совпадать. Нельзя, например, подать на один и тот же суммирующий блок сигналы целого и действительного типов.
Если количество входов блока больше, чем один, то блок выполняет поэлементные операции над векторными и матричными сигналами. При этом количество элементов в матрице или векторе должно быть одинаковым.
Если в качестве списка знаков указать цифру 1 (один вход), то блок можно использовать для определения суммы элементов вектора.
4. Осциллограф Scope (из библиотеки Sinks - приемники сигналов). Характеристики осциллографа были рассмотрены ранее (см. основные сведения работы с пакетом Simulink).
Дважды щёлкнув на осциллограф получим график переходного процесса h(t) (рис. 1.49).
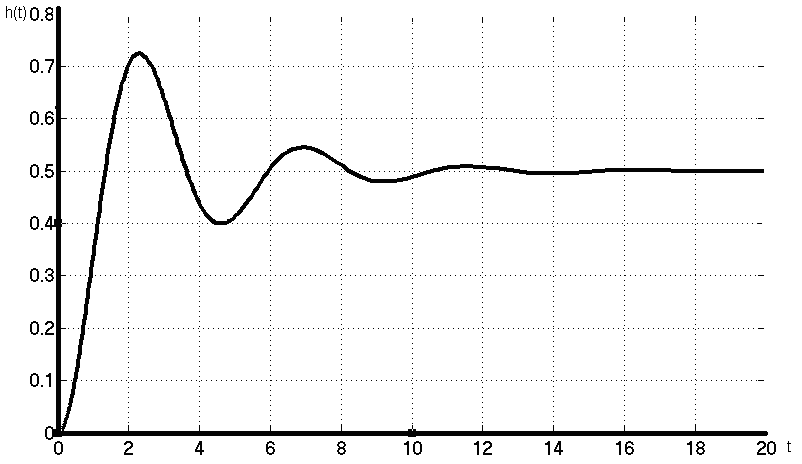
Рис. 1.49. График переходного процесса.
Построим весовую функцию, ЛАЧХ, ЛФЧХ, диаграмму Найквиста, нули и полюсы системы (см. Основные сведения работы с пакетом Simulink).
Диаграммы представлены на рис. 1.50
На диаграмме нули системы обозначаются кружочками и полюсы – крестиками.
-
Исследование САР в MATLAB.
-
Определение передаточной функции замкнутой системы
-
Сначала введём передаточные функции звеньев (колебательное и апериодическое), из которых состоит система в основном окне MATLAB (рис.1.1) (см. основы работы с MATLAB).
На диаграмме нули системы обозначаются кружочками и полюсы – крестиками.
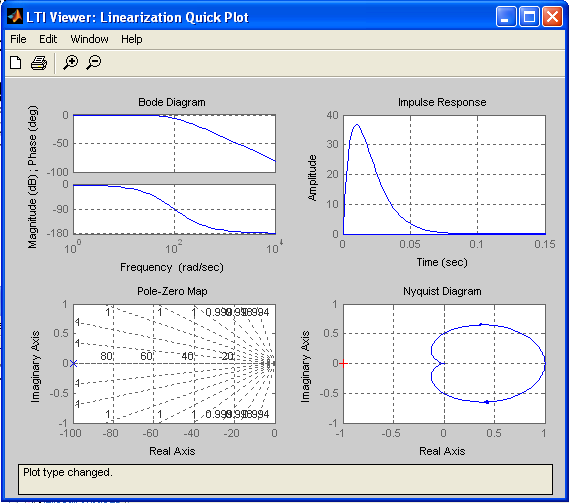
Рис. 1.50. Весовая функция, ЛАЧХ, ЛФЧХ, диаграмма Найквиста,
нули и полюсы системы
Далее к системе с неединичной обратной связью используется функция feedback.
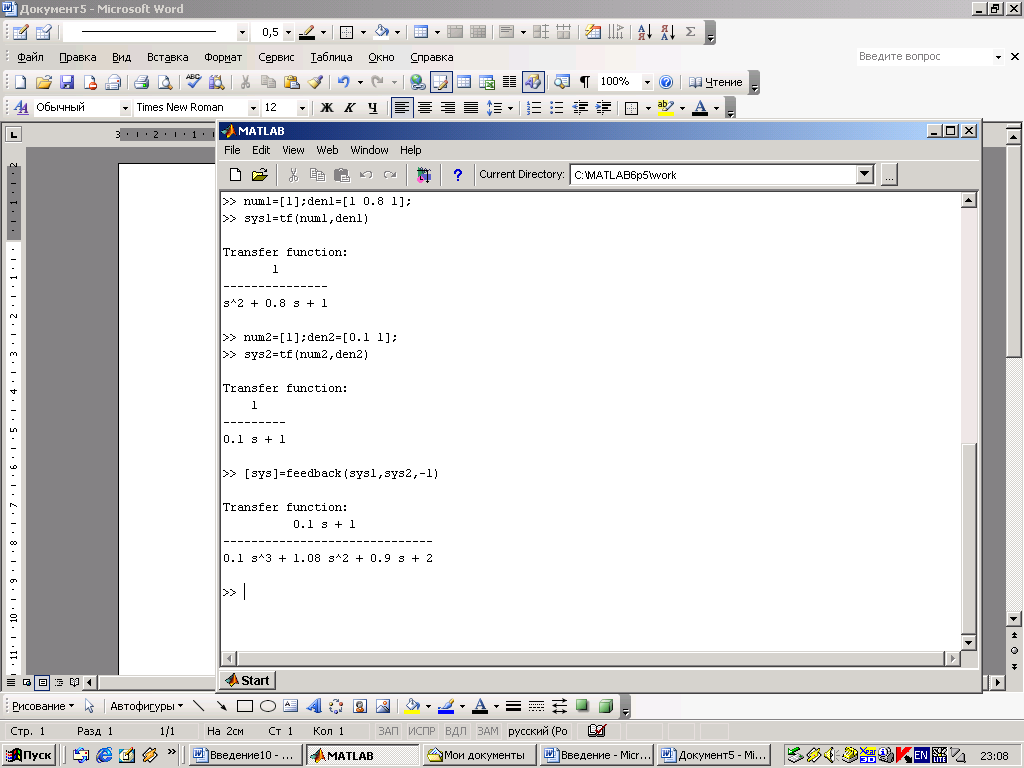
Таким образом получена передаточная функция замкнутой системы.
Переходную
функцию
![]() ,
импульсно – переходную (весовую) функцию
,
импульсно – переходную (весовую) функцию
![]() ,
ЛАЧХ и ЛФЧХ, диаграмму Найквиста, нули
и полюса системы можно получить с помощью
пакета прикладных программ Control
System Toolbox 5.
Он предназначен для работы с LTI-моделями
(Linear
Time Invariant Models)
систем управления. Некоторые команды
Control
System Toolbox
приведены в таблице 1.1.
,
ЛАЧХ и ЛФЧХ, диаграмму Найквиста, нули
и полюса системы можно получить с помощью
пакета прикладных программ Control
System Toolbox 5.
Он предназначен для работы с LTI-моделями
(Linear
Time Invariant Models)
систем управления. Некоторые команды
Control
System Toolbox
приведены в таблице 1.1.
Таблица 1.1. Некоторые команды Control System Toolbox
|
Синтаксис |
Описание |
|
pole(<LTI-объект>) |
Вычисление полюсов передаточной функции |
|
zero(<LTI-объект>) |
Вычисление нулей передаточной функции |
|
step(<LTI-объект>) |
Построение графика переходного процесса |
|
impulse(<LTI-объект>) |
Построение графика импульсной переходной функции |
|
bode(<LTI-объект>) |
Построение логарифмических частотных характеристик (диаграммы Боде) |
|
nyquist(<LTI-объект>) |
Построение частотного годографа Найквиста |
С помощью команды pole([sys]) и zero([sys]) получаем полюсы и нули передаточной функции замкнутой системы.
С помощью команд step([sys]) и impulse([sys]) получаем графики переходной (рис. 1.51) и импульсно – переходной (весовой) функции (рис. 1.52).
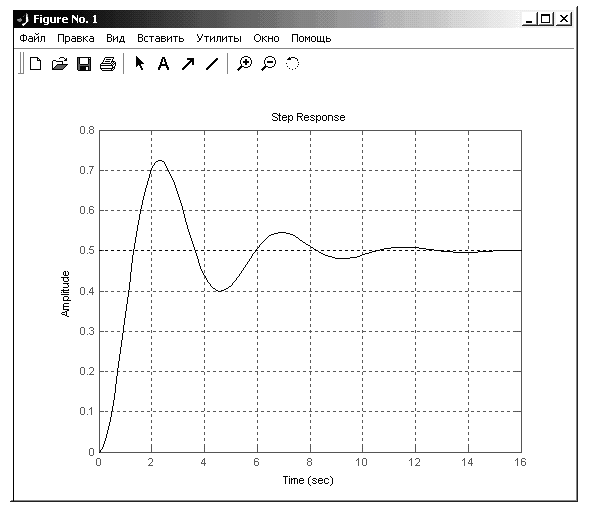
Рис. 1.51. График переходной функции
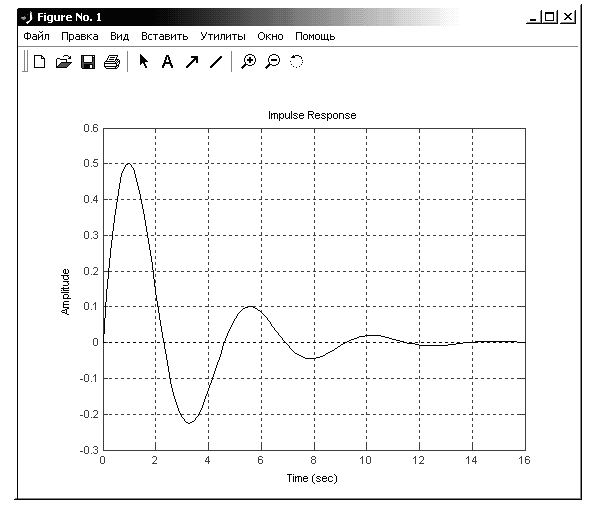
Рис. 1.52. График импульсно – переходной
(весовой) функции
С помощью команды bode ([sys]) ЛАЧХ и ЛФЧХ передаточной
функции (рис. 1.53).
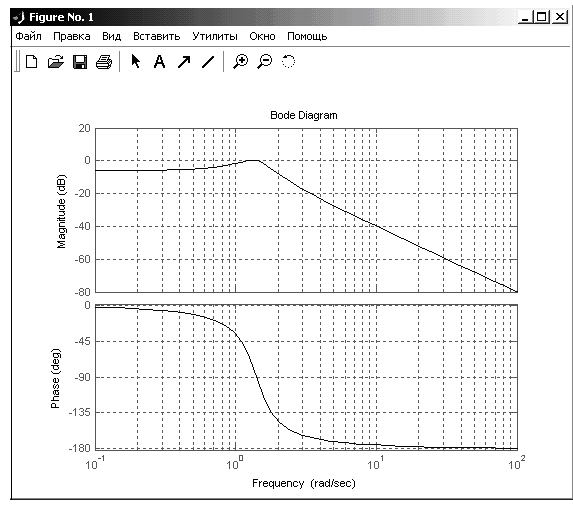
Рис. 1.53. ЛАЧХ и ЛФЧХ передаточной функции
Используя команду nyquist([sys]) получаем частотный годограф Найквиста (рис. 1.54).
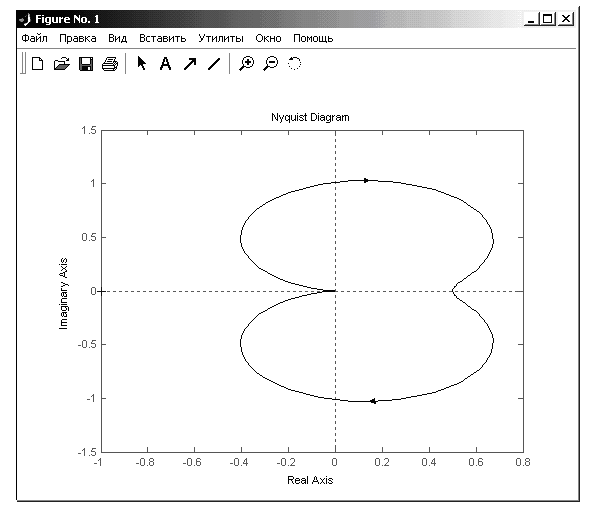
Рис. 1.54. Частотный годограф Найквиста
-
Экспериментальное определение частотных характеристик
динамических звеньев
Цель работы: Экспериментальное определение частотных характеристик фильтра первого порядка и реально дифференцирующего звена. Сравнение экспериментальных характеристик с характеристиками, построенными с использованием средств MATLAB.
Частотные характеристики широко используются при анализе динамических звеньев и систем автоматического управления. Однако формальное построение данных характеристик по известным формулам и, тем более, с использованием средств MATLAB (например, LTI-viewer), не позволяет в полной мере отразить смысл указанных характеристик. Данная работа позволяет понять методику снятия экспериментальных частотных характеристик любых объектов на примере простых динамических звеньев.
Амплитудно-частотная (АЧХ) и логарифмическая амплитудно-частотная (ЛАЧХ) характеристики какого-либо объекта показывают во сколько раз амплитуда выходного синусоидального сигнала больше амплитуды входного синусоидального сигнала при определенной частоте.
Фазо-частотные характеристики того же объекта показывают, на сколько градусов по фазе сдвинут выходной синусоидальный сигнал относительно входного синусоидального сигнала при определенной частоте.
Следовательно, для экспериментального определения частотных характеристик какого-либо объекта необходимо на вход данного объекта подавать синусоидальные сигналы разной частоты и известной амплитуды. При этом для каждой частоты следует фиксировать амплитуду выходного сигнала и фазовый сдвиг выходного сигнала относительно входного.
Порядок выполнения работы
-
Определение параметров моделей звеньев
В работе должны быть получены частотные характеристики фильтра первого порядка и реально дифференцирующего звена, параметры которых задаются по вариантам.
-
Создание модели для снятия частотных характеристик
Модель, предлагаемая для снятия экспериментальных характеристик, приведена на рис.1.55. Все блоки, представленные на данной модели, изучались ранее за исключением блока Sine Wave из раздела Sources. В параметрах этого блока можно задать амплитуду, фазу и частоту синусоидального сигнала.
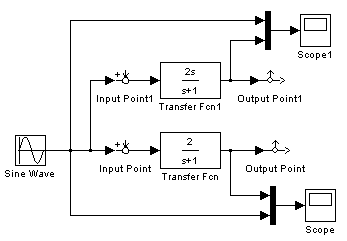
Рис. 1.55 Модель для снятия частотных характеристик звеньев
-
Экспериментальное снятие характеристик
3.1.В параметрах блока Sine Wave установить частоту выходного сигнала согласно значениям, приведенным в первой строке таблицы 1.2. Амплитуда входного сигнала выбирается единичной. Установить время счета модели согласно второй строке таблицы 1.2. Частоты сигналов для удобства построения логарифмических частотных характеристик берутся через декаду. Каждое соответствующее время счета модели равно двум периодам задаваемого сигнала.
3.2. Для каждой частоты определить отношение амплитуд выходной синусоиды к входной и сдвиг фаз выходного сигнала относительно входного. Результаты занести в таблицы 1.2. По результатам эксперимента рассчитать и построить ЛАЧХ (L()) и ЛФЧХ (()).
Таблица1.2. Расчет логарифмических и частотных характеристик
|
Частота ,1/с |
0,01 |
0,1 |
1 |
10 |
100 |
1000 |
|
Время счета, с |
200 |
20 |
2 |
0,2 |
0,02 |
0,002 |
|
Отношение амплитуд, Авых/Авх |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сдвиг фаз (), град. |
|
|
|
|
|
|
2.2 Лабораторная работа № 2
Исследование позиционных динамических звеньев
Цель работы: Математическое моделирование временных характеристик позиционных звеньев. Изучение динамических свойств, частотных характеристик и оценка влияния параметров на свойства звеньев. Ознакомление с системами MATLAB и MathCAD. Применение этих систем для изучения динамических звеньев.
Программа работы
1.Математическое моделирование. Расчётно - экспериментальная часть
-
Ознакомиться с основами моделирования звеньев и систем управления с использованием пакета MATLAB-Simulink
-
По заданию преподавателя определить параметры звеньев и создать их модели
-
Расчёт временных характеристик исследуемых динамических звеньев:
-
Расчёт переходных функций h(t) и импульсных переменных (весовых) функций ω(t) динамических звеньев по методу структурного моделирования;
-
Аналитический расчет временных характеристик. Сравнить результаты расчета с моделированием.
-
Определение показателей переходных процессов исследуемых звеньев.
-
-
Частотных анализ динамических звеньев с использованием пакета matlab-Simulink:
-
Ознакомиться с частотными методами анализа динамических звеньев;
-
Расчёт и построение амплитудно-фазовых частотных характеристик (диаграмма Найквиста), логарифмических амплитудных L(w) и фазовых частотных φ(w) характеристик (диаграмма Бодэ) с использованием пакета MATLAB;
-
Расчёт и построение асимптотических логарифмических частотных характеристик L(w) и φ(w) динамических звеньев, для колебательных звеньев с учетом поправок
-
-
Расчётно-графическая часть. Составление отчета по
лабораторной работе
-
Представить цель и программу работы, содержание расчетно-экспериментальной части
-
Создаются модели динамических звеньев и задаются параметры этих звеньев
-
Приводятся соответствующие графики переходных функций h(t) и весовых функций w(t) рассматриваемых динамических звеньев
-
Производятся аналитический расчет временных характеристик h(t) и w(t) исследуемых звеньев. Сравнить результаты аналитического расчета с моделированием. Определяются показатели переходных процессов звеньев
-
Приводятся результаты частотного анализа для динамических звеньев с использованием пакета MATLAB-Simulink, представляются временные характеристики, логарифмические частотные характеристики и комплексные частотные характеристики.
-
Рассчитываются и строятся асимптотические ЛАЧХ L(w) и ЛФЧХ
 (w)
для заданных звеньев.
(w)
для заданных звеньев.
-
Сделать выводы по работе
-
Порядок выполнения лабораторной работы
-
Предварительно необходимо ознакомиться с краткими сведениями по пакету МATLAB-Simulink, с основами создания моделей и методике компьютерного исследования звеньев. Необходимо также выполнить работу №1, касающуюся работе с этим пакетом.
-
Определение параметров моделей звеньев. Используемые блоки Simulink. ётом ать и построить асимптотические ЛАЧХ и ЛФЧХ исследуемых звеньев (для колебательных звеньев - с
0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
-
Получить ЛАЧХ и ЛФЧХ, используя LTI-viewer. Для этого в модели предусмотрены входы/выходы Control System Toolbox: Input Point1, Output Point1, Input Point, Output Point. В качестве примера на рис.1.56. приведены, построенные LTI-viewer, ЛАЧХ И ЛФЧХ исследуемые в работе звеньев.
-
Сравнить полученные результаты с результатами построения частотных характеристик средствами MATLAB. Сделать выводы по работе.
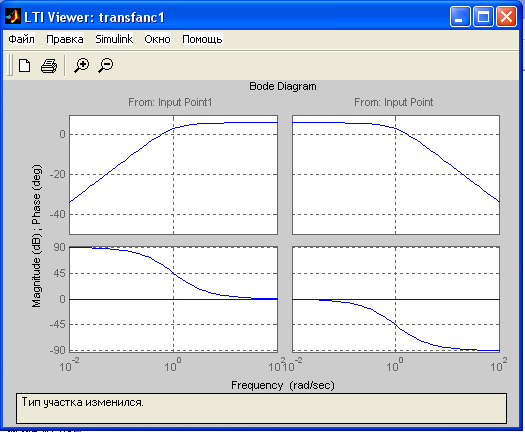
Рис. 1.56. Частотные характеристики звеньев
В результате проделанной работы было показано, что математический пакет Simulink 6.1 позволяет исследовать системы автоматического регулирования наглядным образом, то - есть с помощью понятных блок-схем, состоящих из отдельных звеньев. Представление САР в виде структурных схем в большинстве случаев не требует написания кода программы из-за наличия библиотеки готовых программ, используемых для решения отдельных прикладных задач (библиотеки блоков). Была также продемонстрирована возможность решения поставленной задачи без использования пакета SIMULINK, т.е. возможность использования MATLAB в операциях c передаточными функциями, которые представляют собой отношение двух полиномов. Познакомились с пакетом прикладных программ Control System Toolbox и с его основными функциями, с помощью которых можно проанализировать динамические свойства САР.