Материал: ТАУLAB
1.6. Subsystem - подсистемы
Подсистема это фрагмент Simulink-модели, оформленный в виде отдельного блока. Использование подсистем при составлении модели имеет следующие положительные стороны:
-
Уменьшает количество одновременно отображаемых блоков на экране, что облегчает восприятие модели (в идеале модель полностью должна отображаться на экране монитора).
-
Позволяет создавать и отлаживать фрагменты модели по отдельности, что повышает технологичность создания модели.
-
Позволяет создавать собственные библиотеки.
-
Дает возможность синхронизации параллельно работающих подсистем.
-
Позволяет включать в модель собственные справочные средства.
-
Дает возможность связывать подсистему с каким-либо m-файлом, обеспечивая запуск этого файла при открытии подсистемы (нестандартное открытие подсистемы).
Использование подсистем и механизма их блоков позволяет создавать блоки, не уступающие стандартным по своему оформлению (собственное окно параметров блока, пиктограмма, справка и т.п.).
Количество подсистем в модели не ограничено, кроме того подсистемы могут включать в себя другие подсистемы. Уровень вложенности подсистем друг в друга также не ограничен.
Связь подсистемы с моделью (или подсистемой верхнего уровня иерархии) выполняется с помощью входных (блок Inport библиотеки Sources) и выходных (блок Outport библиотеки Sinks) портов. Добавление в подсистему входного или выходного порта приводит к появлению на изображении подсистемы метки порта, с помощью которой внешние сигналы передаются внутрь подсистемы или выводятся в основную модель. Переименование блоков Inport или Outport позволяет изменить метки портов, отображаемые на пиктограмме подсистемы со стандартных (In и Out) на те, которые нужны пользователю.
Подсистемы могут быть виртуальными (Subsystem) и монолитными (Atomic Subsystem). Отличие этих видов подсистем заключается в порядке выполнения блоков во время расчета. Если подсистема является виртуальной, то Simulink игнорирует наличие границ отделяющих такую подсистему от модели при определении порядка расчета блоков. Иными словами в виртуальной системе сначала могут быть рассчитаны выходные сигналы нескольких блоков, затем выполнен расчет блоков в основной модели, а затем вновь выполнен расчет блоков, входящих в подсистему. Монолитная подсистема считается единым (неделимым) блоком и Simulink выполняет расчет всех блоков в такой подсистеме, не переключаясь на расчеты других блоков в основной модели. Изображение монолитной подсистемы имеет более толстую рамку по сравнению с виртуальной подсистемой.
Подсистемы могут быть также управляемыми или неуправляемыми. Управляемые подсистемы всегда являются монолитными. Управляемые подсистемы имеют дополнительные (управляющие) входы, на которые поступают сигналы активизирующие данную подсистему. Управляющие входы расположены сверху или снизу подсистемы. Когда управляемая подсистема активизирована – она выполняет вычисления. В том случае, если управляемая подсистема пассивна, то она не выполняет вычисления, а значения сигналов на ее выходах определяются настройками выходных портов.
Для создания в модели подсистемы можно воспользоваться двумя способами:
-
Скопировать блок Subsystem в окно модели, перетянув его из раздела Signals & Systems, открыть окно блока Subsystem, дважды щёлкнув на изображение блока в блок-схеме, в пустом окне модели создать подсистему, используя блоки In и Out для создания входов и выходов подсистемы.
-
Выделить с помощью «мыши» нужный фрагмент модели и выполнить команду Create Subsystem из меню Edit окна модели. Выделенный фрагмент будет помещен в подсистему, а входы и выходы подсистемы будут снабжены соответствующими портами. Данный способ позволяет создать виртуальную неуправляемую подсистему. В дальнейшем, если это необходимо, можно сделать подсистему монолитной, изменив ее параметры, или управляемой, добавив управляющий элемент из нужной подсистемы находящейся в библиотеке. Отменить группировку блоков в подсистему можно командой Undo.
1.7 Использование simulink lti – viewer для анализа
ДИНАМИЧЕСКИХ СИСТЕМ
Динамические показатели качества САР могут быть оценены параметрами переходного процесса, т.е. реакцией системы регулирования на скачок задающего или возмущающего воздействия. На практике как прямые, так и косвенные показатели качества могут быть получены по ряду других характеристик:
-
импульсной переходной(весовой) функции w=f(t), т.е. реакцией системы на дельта функцию, или на производную от единичной функции;
-
переходной характеристике h(t) при линейном задающем воздействии;
-
амплитудно-частотной L(w) и фазочастотной φ(w) характеристикам системы;
-
по расположению полюсов и нулей передаточной функции системы.
Анализ вышеперечисленных динамических характеристик может быть выполнен с помощью инструменты Simulink LTI Viewer, входящего в состав пакета прикладных программ Control System ToolBox.
Инструмент Simulink LTI-Viewer входит в состав пакета прикладных программ Control System Toolbox и предназначен для анализа линейных стационарных систем. С помощью данного инструмента можно легко построить частотные характеристики исследуемой системы, получить ее отклики на единичные ступенчатое и импульсное воздействия, найти нули и полюса системы и т.д.
Краткий алгоритм работы с Simulink LTI-Viewer приведен ниже.
1.7.1. Работа с Simulink LTI-Viewer
1. Установить блок Input Point на входе и блок Output Point на выходе исследуемой системы с помощью нажатия правой клавиши мыши по соединительной линии , как это показано на рис. 1.23.
-
Выполнить команду Tools\Control Design\ Linear Analysis... окна Simulink-модели. Рис 1.24
-
В окне Control and Estimation Tools Manager выполнить команду Linearize Model. Рис 1.25
-
Для получения линий сетки и всех графиков в одних осях следует нажать правую клавишу «мыши» в окне LTI Viwer и выбрать из контекстного меню следуещее GRID, а для графиков I\O Grouping\ALL. Рис 1.27.
Данная команда (Linearize Model) выполняет линеаризацию модели и строит реакцию системы на единичное ступенчатое воздействие. Результат данной команды на рис 1.26. Если система имеет несколько входов и выходов и для всех них установлены блоки Input Point и Output Point, то на графике будет отображено несколько окон показывающих реакцию на каждом выходе при воздействии на каждый вход.
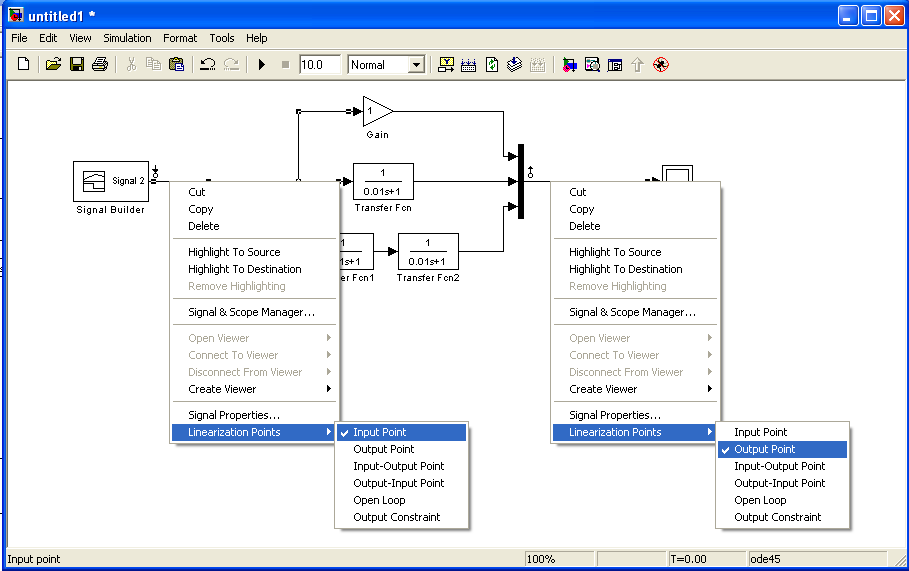
Рис. 1.23. Исследуемая модель с установленными блоками
Input Point и Output Point
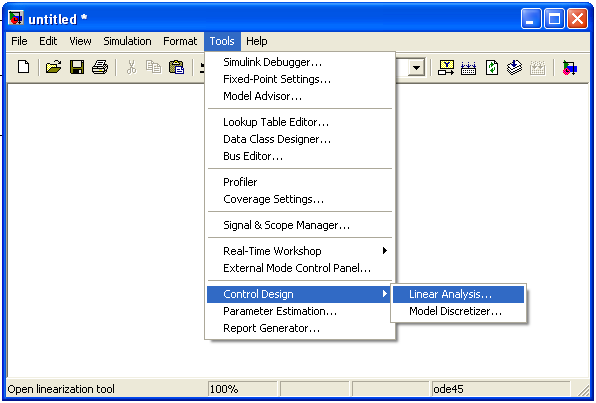
Рис 1.24 Порядок запуска LTI
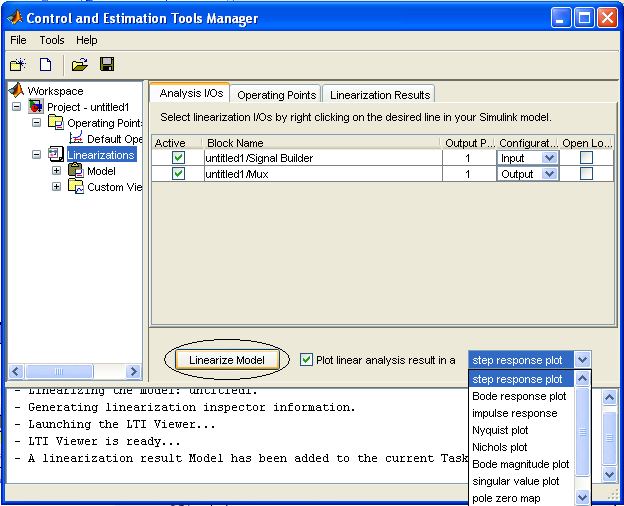
Рис 1.25 Порядок получения характеристик
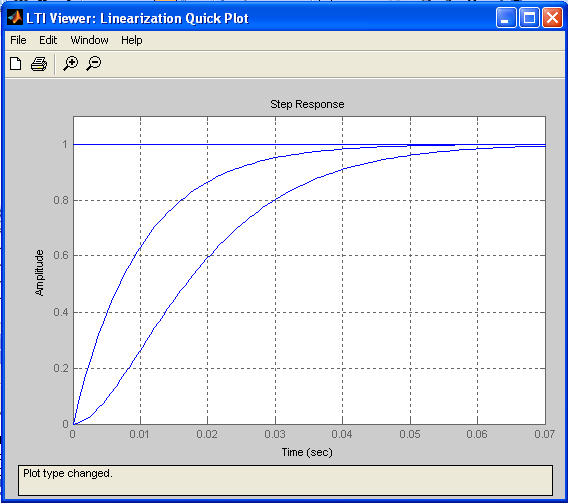
Рис 1.26 Реакция системы на единичное ступенчатое воздействие
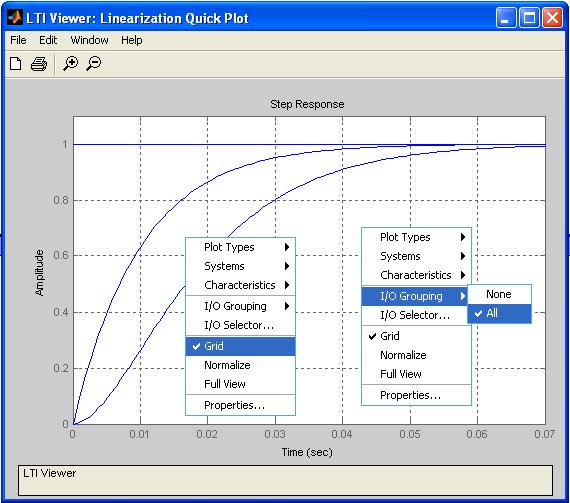
Рис 1.27 Порядок получения линий сетки и графиков
в одних осях
5. Для получения остальных характеристик системы необходимо выполнить команду Plot Types\Impulse и т.д. нажатием правой клавиши «мыши» в окне LTI Viewer Рис 1.28.
Либо выполнить команду Edit\Plot Configuration... в окне LTI Viewer. В результате выполнения этой команды откроется окно Plot Configuration, показанное на рис. 1.29.
В открывшемся окне можно выбрать число отображаемых графиков (панель Select a response plot configuration) и вид отображаемых графиков (панель Response type). Для построения доступны следующие графики (диаграммы):
-
step – Реакция на единичное ступенчатое воздействие.
-
impulse – Реакция на единичное импульсное воздействие.
-
bode – Логарифмические амплитудная и фазовая частотные характеристики.
-
bode mag – Логарифмическая амплитудная частотная характеристика.
-
nyquist – Диаграмма Найквиста.
-
nichols – Годограф Николса.
-
sigma – Сингулярные числа.
-
pole/zero – Нули и полюса системы.
На рис. 1.30 приведен пример окна Simulink LTI-Viewer с несколькими различными характеристиками исследуемой системы.
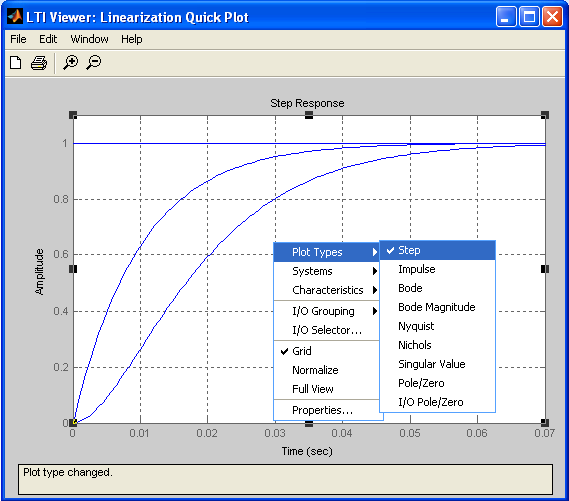
Рис 1.28 Получение остальных характеристик системы
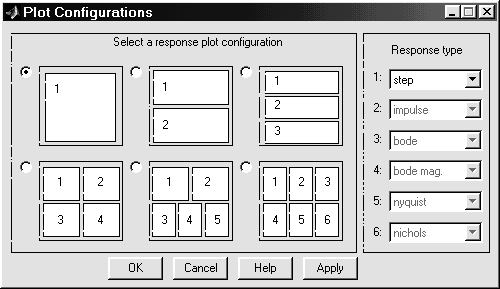
Рис. 1.29 Окно Plot Configuration
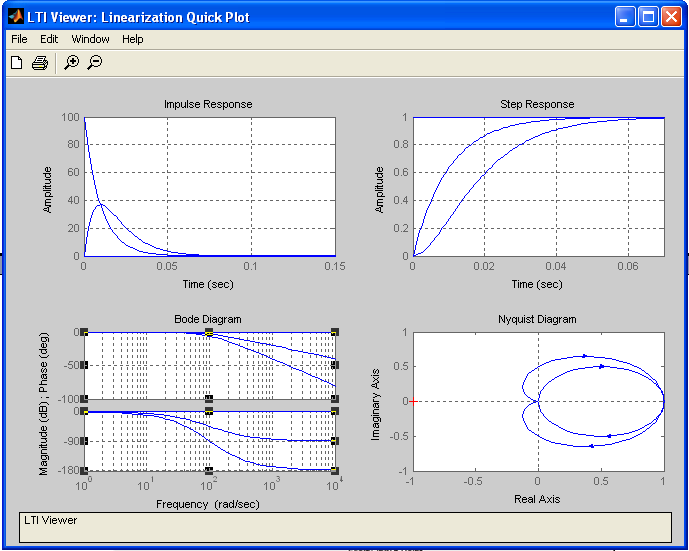
Рис. 1.30 Окно Simulink LTI-Viewer с несколькими графиками.
Настройку внешнего вида графиков можно выполнить с помощью команды Edit\Line Styles… (установка вида и цвета линий, вида маркеров).
Так же по графику можно определить любую координату нажатием левой клавишей мыши по графику. Рис 1.31
1.7.2. Настройка Simulink LTI-Viewer
С помощью команды Edit\Viewer Preferences… выполняются следующие виды настройки:
1. Установка единиц измерения (вкладка Units). Вид окна при настройке единиц измерения показан на рис. 1.32.
Вкладка Units окна позволяет задать единицы измерения частоты (рад/c или Гц), уровня (dB или абсолютные единицы), фазы (градусы или радианы), а также установить вид шкалы частоты (логарифмический или линейный).
2. Установка стиля графиков (вкладка Style). На данной вкладке можно выполнить настройку шрифтов окна Simulink LTI-Viewer (панель Fonts), выбрать цвет осей графиков (панель Colors), а также задать нанесение линий сетки на графики (флажок Show grids). Внешний вид вкладки Style показан на рис. 1.33.
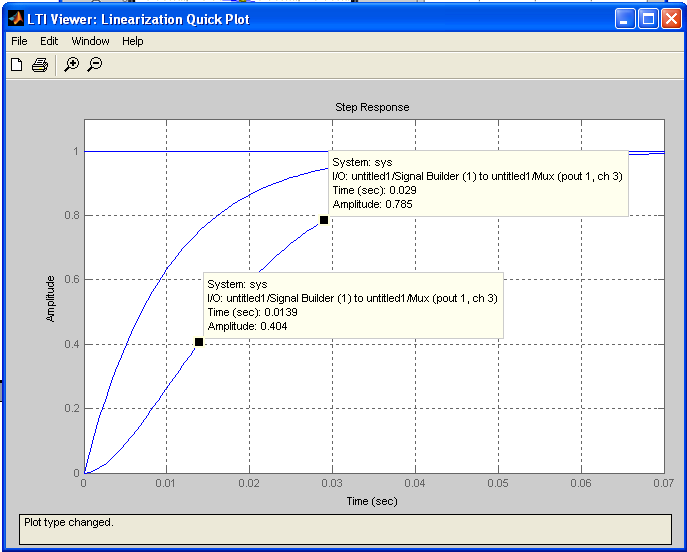
Рис 1.31 Определение координат
3. Установка параметров расчета переходного процесса (вкладка Characteristics). Данная вкладка позволяет задать параметры установленные "по умолчанию" для вычисления времени нарастания и времени переходного процесса. По умолчанию Simulink LTI-Viewer вычисляет
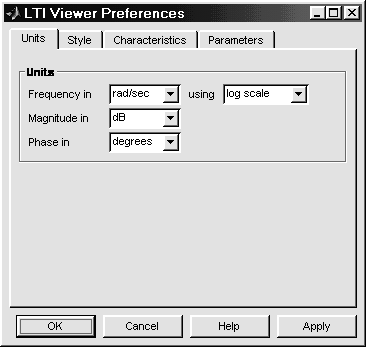
Рис. 1.32 Вкладка Units
время переходного процесса, как время, когда переходная функция входит в 2% зону и больше не выходит из нее (параметр Show setting time within). Также можно изменить параметры для вычисления времени переходного процесса (Show rise time from). На данной вкладке имеется также флажок Unwrap phase, установка которого позволяет избежать отображения разрывов в фазо-частотной характеристике, связанных с областью определения функции arctg, вычисляющей фазовый сдвиг. Внешний вид вкладки Characteristics показан на рис. 1.34.
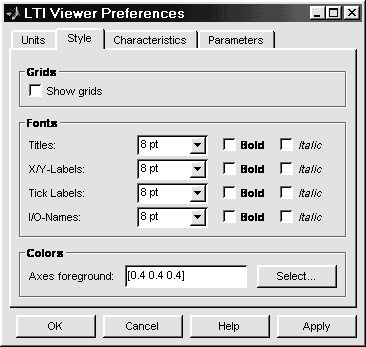
Рис. 1.33 Вкладка Style
4. Установка интервалов времени и частоты (вкладка Parameters). На данной вкладке задается временной интервал для расчета переходного процесса (панель Time Vector), а также интервал частот для расчета частотных характеристик (панель Frequency Vector). Внешний вид вкладки Parameters показан на рис. 1.35.
Векторы времени и частоты можно вычислять в автоматическом режиме (Generate automatically), ввести конкретное значение для времени окончания расчета (Define stop time) или диапазон значений по частоте (Define range), либо задать непосредственно вектор значений времени или частоты (Define vector).
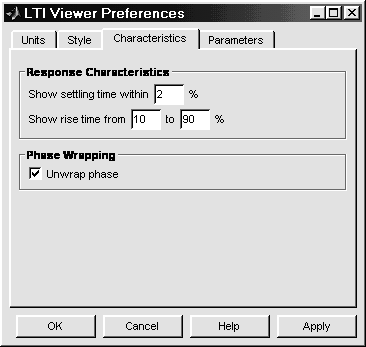
Рис. 1.34 Вкладка Characteristics
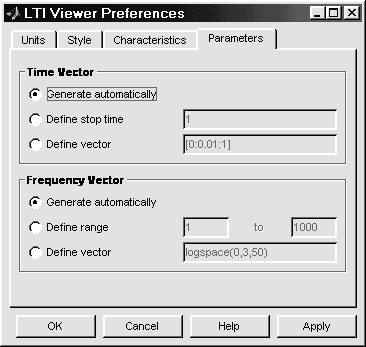
Рис. 1.35 Вкладка Parameters