Материал: ТАУ Лекция ч2
|
|
|
|
|
© К.Ю. Поляков, 2009 |
||
Пересчет дробно-рациональных спектров выполня- |
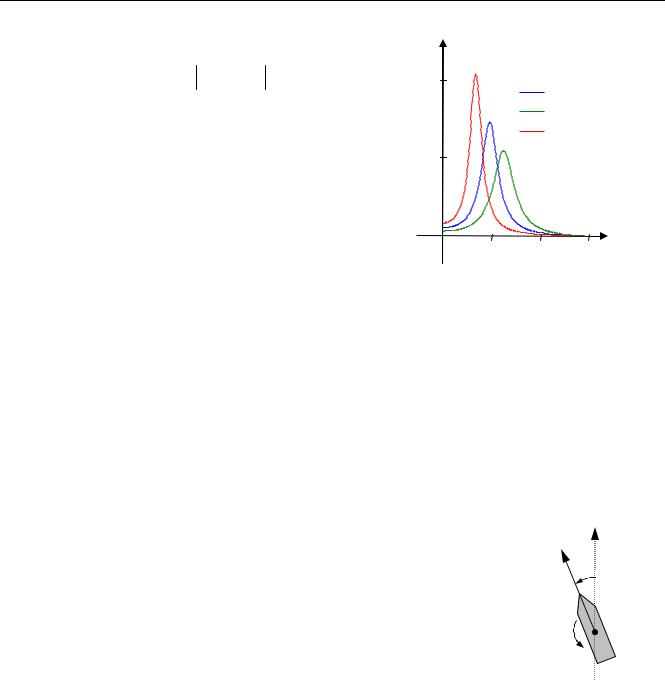
Sr (ω) , м2/Гц |
|
|
||||
ется достаточно просто. Вычисляют частоту максимума |
|
|
|
|
|||
кажущегося спектра ωmk = ωm + aωm2 , и в приведенных |
1 |
|
|
ξ = 0 |
|||
выражениях |
для спектров используют |
βk =1,02ωmk и |
|
|
|
||
|
|
|
ξ = 45o |
||||
αk = 0,21βk |
вместо α и β . Дисперсия Dr |
сохраняется та |
|
|
|
ξ =135o |
|
же самая. На рисунке слева показаны дробно- |
0,5 |
|
|
|
|||
рациональные спектры (типа 1) для разных углов встречи |
|
|
|
|
|||
с волной (волнение 4 балла, h3% = 2 м, |
скорость судна |
|
|
|
|
||
4 м/с). Видно, что общий характер смещения спектров та- |
0 |
1 |
2 |
3 ω , рад/c |
|||
кой же, как и для пересчитанного спектра МКОБ. |
|||||||
|
|
|
|
||||
4.3. Моделирование действия морского волнения на судно
Спектры, рассмотренные выше, относились к изменению волновой ординаты, тогда как для разработчика систем управления важно выяснить влияние волнения на динамику судна (угол рыскания, качку и т.п.). Как связано изменение волновой ординаты и рыскание (качка) судна? К сожалению, ответ на этот вопрос не прост и требует довольно полной информации о судне, например, об обводах корпуса. В конечном счете, (для линейной модели) требуется построить частотную характеристику H ( jω) , которая связывает волновую ординату и требуемую характеристику движения судна, например, угол рыскания или угол крена.
Рассмотрим более подробно задачу стабилизации судна по курсу. Простейшая линейная модель судна – это модель первого порядка (модель Номото), которая связывает угловую скорость вращения вокруг вертикальной оси (оси Z) и угол перекладки руля:
|
1 |
ωz + |
K |
δ , |
заданный |
|
& |
курс |
|||||
|
|
|||||
ωz = − |
TS |
TS |
ϕ |
|||
|
|
|
||||
где ωz – угловая скорость (в рад/с), δ |
– угол поворота руля (в радианах), TS – |
|
||||
постоянная времени (в секундах) и K – безразмерный коэффициент. Угловая |
ωz |
|||||
скорость (в такой простейшей модели) равна производной от угла рыскания ϕ |
||||||
(так называется угол отклонения от заданного курса). Поэтому к модели нужно добавить еще одно уравнение:
ϕ& = ωz .
Обычно угол рыскания считается положительным при вращении против часовой стрелки. Волновое возмущение приводит к тому, что появляется дополнительное вращение, откло-
няющее судно от заданного курса, то есть, уравнение Номото с учетом возмущения принимает вид
& |
1 |
ωz + |
K |
δ + w , |
(10) |
|
|
||||
ωz = − |
TS |
TS |
|||
|
|
|
|
где w – возмущение, вызванное морским волнением. Будем считать, что все случайные процессы в системе – центрированные, то есть, их математические ожидания равны нулю. Спектр Sw (ω) возмущения w рассчитывается по общей формуле
Sw (ω) = H ( jω)H (− jω)Sr (ω) ,
36
|
|
|
|
|
|
|
|
|
|
|
© К.Ю. Поляков, 2009 |
где Sr (ω) – спектральная плотность волновой ординаты, а H ( jω) |
– частотная характеристика, |
||||||||||
описывающая реакцию судна на волнение. Для построения H ( jω) |
нужно использовать уравне- |
||||||||||
ния движения конкретного судна. |
|
|
|
|
|
|
|
|
|
|
|
Спектральную плотность Sw (ω) |
|
часто удается достаточно успешно аппроксимировать |
|||||||||
дробно-рациональным спектром вида |
|
|
|
|
|
|
|
|
|
|
|
ˆ |
|
|
|
|
|
|
Kw2ω2 |
|
|
|
|
Sw (ω) |
= |
|
|
|
|
|
|
|
|
, |
|
|
ω |
4 |
|
2 |
2 |
2 |
4 |
|
|||
|
|
|
|
+ 2ω0 |
(λ −1)ω |
|
+ω0 |
|
|||
где ω0 – доминирующая частота |
волн, |
λ |
– коэффициент |
демпфирования ( 0 < λ <1 ), |
|||||||
Kw = 2λω0σw и σw – коэффициент, определяющий интенсивность волнения. Формирующий фильтр для такой спектральной плотности имеет вид
F(s) = Kws .
s2 +2λω0s +ω0
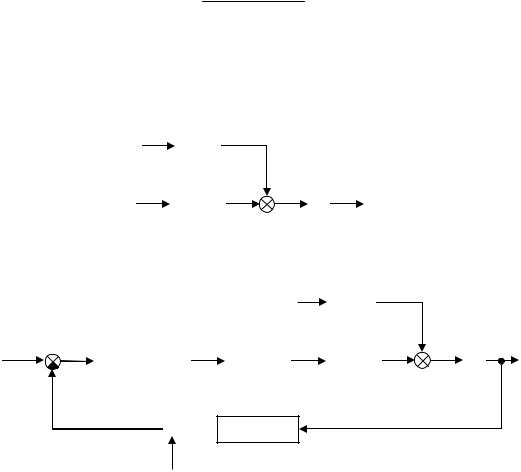
Легко проверить, что Sw (ω) = F( jω)F(− jω) . Таким образом, для моделирования волнения нужно пропустить белый шум через формирующий фильтр с передаточной функцией F(s) и полученный сигнал w(t) подключить к модели Номото (10). Соответствующая блок-схема системы выглядит так:
белый |
|
|
Fw (s) |
|
|
|
|
|
шум |
|
|
|
w |
||||
|
|
|
|
|
|
|||
δ |
|
|
|
|
|
ωz |
|
ϕ |
|
|
K |
1 |
|||||
|
|
|
TS s +1 |
|
|
|
s |
|
|
|
|
|
|
|
|
|
|
Эта схема описывает разомкнутую систему (без обратной связи). Система управления с обратной связью включает также регулятор, привод руля, измерительную систему (датчики):
|
|
|
|
|
белый |
|
|
|
Fw (s) |
|
|
|
|
|
|
|
|
|
|
шум |
|
|
|
|
w |
|
|||
заданный ϕ0 + |
ошибка |
u |
|
|
|
|
|
|
|
ϕ |
||||
|
|
δ |
|
|
|
|
ωz |
|
||||||
ε |
|
|
|
|
|
K |
|
1 |
||||||
регулятор |
привод |
|
|
|
||||||||||
курс |
– |
|
|
|
|
|
|
TS s +1 |
|
s |
|
|||
|
|
|
|
|
|
|
|
|
|
|
||||
 датчики
датчики
шум измерений m
Точность стабилизации на курсе определяется среднеквадратическим отклонением (СКВО) σϕ угла рыскания (или его дисперсией). Кроме того, требуется, чтобы мощность
управления (СКВО угла перекладки руля σδ ) не была слишком большой. Как правило, эти за-
дачи противоречивы. Это значит, что для уменьшения рыскания нужно увеличивать мощность управления, а при уменьшении активности руля увеличивается рыскание.
Кроме внешних возмущений, нужно обязательно учитывать шум (помехи) измерений (сигнал m на схеме). Дело в том, что неправильно спроектированный регулятор может хорошо работать в идеальных условиях, но приводить к «раскачиванию» системы при малейших ошибках измерений.
37

© К.Ю. Поляков, 2009
Шум измерений обычно моделируется как белый шум, имеющий равномерный спектр на всех частотах. Поскольку объект (апериодическое звено) является фильтром низких частот, сигнал ϕ (изменение курса) не может быть высокочастотным. Поэтому регулятор должен по-
давлять высокочастотные сигналы, которые явно вызваны ошибками измерений.
38

© К.Ю. Поляков, 2009
5. Оптимизация систем при случайных возмущениях
5.1. Что такое оптимальная система?
Слово «оптимальный» означает «наилучший в некотором отношении». Для того, чтобы этот термин имел смысл, нужно определить, как именно (по какому критерию) мы будем оценивать систему управления. Критерий I (x) – это оценка качества системы в виде числа, зави-
сящая от выбора некоторых изменяемых параметров x . Эти параметры нужно выбрать так, чтобы обеспечить минимум или максимум критерия:
I (x) → min или I (x) → max .
В первом случае критерий выражает потери (расходы, убыток), в этом случае функция I (x) часто называется функцией потерь. Во втором случае I (x) – это доходы (прибыль и т.п.). Если критерий I (x) зависит от выбора некоторой функции (например, от неизвестной передаточной функции регулятора), величину I (x) называют функционалом.
В теории управления чаще всего рассматривается задача на минимум какого-то критерия (определяющего ошибку). Решение называется оптимальным, если выбранное x обеспечивает минимальное значение I (x) среди всех допустимых решений. При этом нельзя сказать, что та-
кая система «самая лучшая». Она является лучшей только по выбранному критерию, а по другим показателям она может вести себя неудовлетворительно.
На практике к системе обычно предъявляется много разных требований, то есть в идеале хочется сделать минимальными несколько величин (например, уменьшить рыскание судна и одновременно снизить активность руля). Такие задачи называются задачами многокритериальной или многоцелевой оптимизации. Как правило, отдельные требования противоречивы (чтобы уменьшить рыскание, нужно увеличивать мощность управления). В этом случае задача не имеет единственного решения; оптимальным (или Парето-оптимальным12) называют любое решение, для которого улучшение по любому показателю невозможно без ухудшения какого-либо другого.
Обычно стараются составить один общий критерий, который отражает все наиболее важные требования к системе. Однако это тоже «палка о двух концах» – любое усложнение критерия затрудняет поиск оптимального решения, особенно аналитическими методами.
Часто такой единый критерий представляет собой взвешенную сумму отдельных показателей качества I1 (x), I2 (x),K, IN (x) , которые складываются после умножения на весовые коэф-
фициенты k1, k2 ,K, kN (в большинстве случаев все они неотрицательны):
I (x) = k1I1 (x) +k2 I2 (x) +KkN IN (x) → min .
Любое решение этой задачи при некоторых коэффициентах является Парето-оптимальным, поскольку для него невозможно одновременно улучшить все показатели. Коэффициенты выбираются методом проб и ошибок так, чтобы полученное компромиссное решение удовлетворяло техническому заданию.
5.2.Оптимальная фильтрация
5.2.1.Постановка задачи
Задача любой системы управления – поддерживать заданный режим. В идеале ошибка – отклонение от этого режима – должна быть нулевой. Если на систему действуют случайные возмущения, даже в установившемся режиме нельзя обеспечить нулевую ошибку, поскольку
12 В честь итальянского экономиста В. Парето, предложившего такой подход.
39
© К.Ю. Поляков, 2009
эти возмущения все время будут выводить систему из состояния равновесия. Таким образом, ошибка тоже будет случайным процессом.
В этом случае часто требуется выбрать регулятор так, чтобы сделать ошибку минимальной в статистическом смысле: уменьшить, насколько возможно, ее дисперсию (или, эквивалентно, среднеквадратическое отклонение). Заметим, что в этой задаче могут быть выбраны и другие критерии качества. Например, можно потребовать, чтобы дисперсия ошибки не превышала заданное значение при всех возможных возмущениях (задача гарантирующего управления). В минимаксной задаче нужно обеспечить минимум ошибки в самом худшем случае.
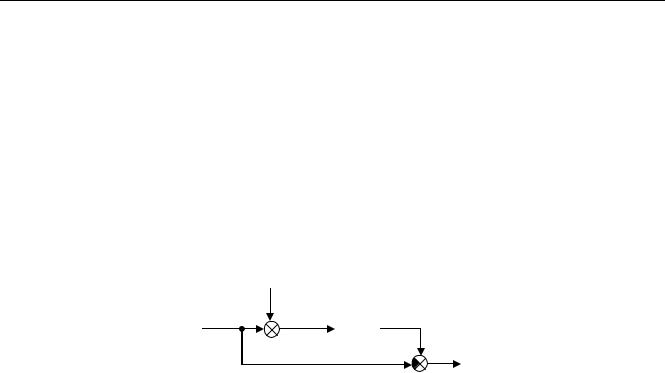
Рассмотрим простейшую задачу оптимизации линейной системы при случайных возмущениях – задачу оптимальной фильтрации. При измерениях полезный сигнал x(t) искажается
помехой n(t) , причем и полезный сигнал, и помеха – стационарные центрированные случайные
процессы. Предполагается, что помеха и полезный сигнал статистически независимы, то есть, никак не связаны, порождаются разными источниками.
|
n |
|
xˆ |
|
x |
x + n |
|
||
C(s) |
||||
|
|
|
||
|
|
|
|
ε
Задача состоит в том, чтобы с помощью некоторого фильтра выделить сигнал из его смеси с помехой наилучшим образом – построить его наилучшую оценку xˆ(t) . Наилучшей оценкой бу-
дем считать такую, при которой дисперсия Dε ошибки ε = xˆ − x минимальна.
Предполагается, что известны только спектральные плотности полезного сигнала SX (ω) и помехи SN (ω) . Если фильтр C(s) – линейный, этих данных достаточно для того, чтобы
1)найти дисперсию ошибки при известном фильтре;
2)построить оптимальный линейный фильтр.
При этом результат не зависит от плотностей распределения вероятности входных сигналов. Если фильтр нелинейный, для решения обеих задач требуется знать плотности вероятности. Тем не менее, оптимальный фильтр все равно будет линейным, если сигнал и помеха имеют нормальное (гауссово) распределение.
Таким образом, при заданных спектральных плотностях SX (ω) и SN (ω) требуется найти передаточную функцию линейного фильтра C(s) , который обеспечивает минимальную дисперсию Dε ошибки ε . Эту задачу впервые решил американский математик Норберт Винер в
1940-х годах, поэтому она называется задачей Винера, а соответствующий оптимальный фильтр
– фильтром Винера.
5.2.2. Фильтр Винера
Вспомним, что знание спектральной плотности Sε (ω) ошибки позволяет найти ее средний квадрат, равный дисперсии для центрированных процессов:
|
1 |
∞ |
1 |
j∞ |
|
|
Dε = |
∫Sε (ω) dω = |
∫Sε (s) ds . |
(11) |
|||
2π |
2πj |
|||||
|
−∞ |
− j∞ |
|
В последнем равенстве от угловой частоты ω мы перешли к комплексной переменной s = jω .
Если помехи нет, спектральная плотность ошибки вычисляется по передаточной функции от входа x к выходу ε , которая равна C(s) −1:
40