Материал: ТАУ Лекция ч2
© К.Ю. Поляков, 2009
сто дисперсий использовать соответствующие среднеквадратические отклонения – σε = Dε и
σu = Du , которые измеряются в тех же единицах, что и исходные величины. Этот график показывает, какая мощность управления требуется, чтобы обеспечить заданную точность стаби-
лизации. Наоборот, по графику можно определить, какую точ- σ |
|
|
ность можно обеспечить, имея заданную мощность управления. |
u |
|
|
|
|
В этом смысле можно называть эту кривую кривой качества |
|
|
системы. |
|
|
Каждая точка этой кривой соответствует какому-то Паре- |
|
|
то-оптимальному регулятору. Поскольку для таких регуляторов |
|
|
нельзя одновременно уменьшить оба показателя качества, вы- |
|
|
пуклость кривой всегда направлена в сторону начала коорди- |
|
σε |
нат. Серая область недостижима, то есть, ни один регулятор в |
|
|
|
|
|
такой системе не может обеспечить соответствующее качество. |
|
|
51
© К.Ю. Поляков, 2009
6. Оптимальные следящие системы
6.1. Постановка задачи
Задача следящей системы – отслеживать на выходе z сигнал r , подаваемый на вход. Например, систему автоматического управления курсом корабля (автопилот) можно рассматривать как следящую систему ( r – заданный курс, z – фактический курс).
Точность следящей системы определяется свойствами сигнала ошибки ε = r − z :
r |
следящая z |
ε |
|
система |
|
Если эталонный (задающий) сигнал r – случайный процесс с известной спектральной плотностью, мы получаем задачу оптимизации при случайных возмущениях, варианты которой были рассмотрены ранее.
Здесь мы остановимся на задаче оптимизации при детерминированных (известных, определенных, неслучайных) возмущениях. Это означает, что мы знаем входной сигнал r (например, его изображение по Лапласу R(s) ). При этом требуется обеспечить «малость» ошибки ε в
некотором смысле. В идеальном случае ошибка равна нулю для любого момента времени. В реальных системах этот результат чаще всего недостижим, поскольку требует бесконечно большого управления.
Предположим, что входной сигнал имеет ступенчатый вид, причем можно считать, что его изменение происходит достаточно редко, так что при очередном скачке переходный процесс, вызванный предыдущим изменением, уже закончился. В этом случае имеет смысл строить систему, оптимальную для единичного скачка на входе. Так как система линейная, при любом изменении величины скачка она останется оптимальной (изменится только величина сигналов).
В идеале мы хотим, чтобы изменение входного сигнала мгновенно привело к такому же изменению на выходе. Можно догадаться, что для мгновенного перевода инерционной системы (а не просто усилителя) в новое состояние требуется бесконечное управление. Этот вариант неприемлем с практической точки зрения и нереализуем, поскольку управляющий сигнал всегда ограничен. Таким образом, реальный переходный процесс будет отличаться от идеального. Как же измерить эту ошибку, оценив ее одним числом?
|
|
z(t) |
ε < 0 |
|
r(t) |
r(t) |
|
|
z(t) |
|
|
|
ε > 0 |
ε > 0 |
|
0 |
t |
0 |
t |
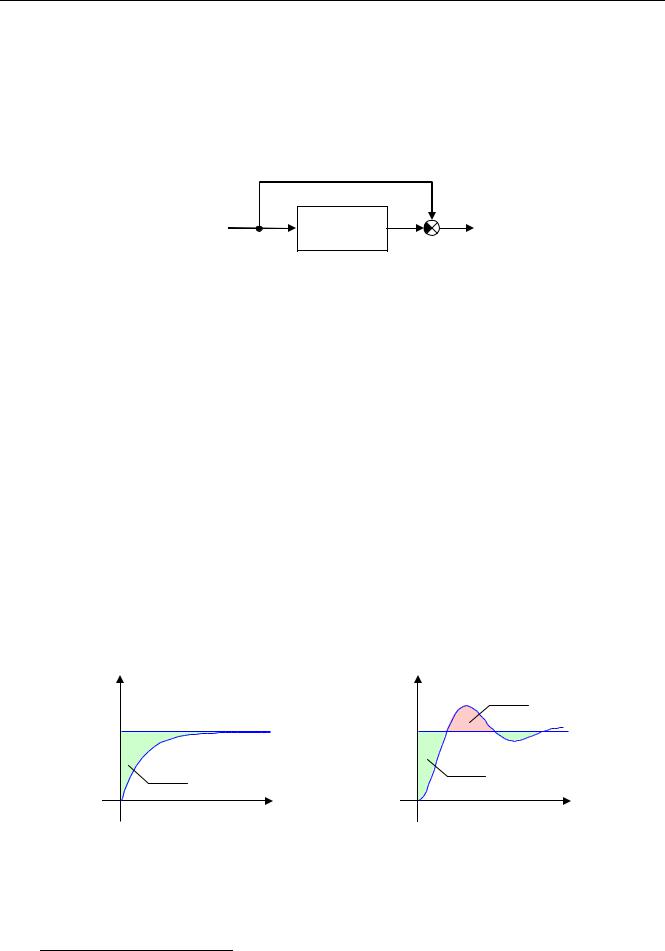
Казалось бы, можно взять интеграл от сигнала ошибки ε = r − z на интервале от 0 до бесконечности15
∞
I1 = ∫ε(t) dt ,
0
15 Чтобы такой интеграл сходился, необходимо, чтобы ошибка ε(t) стремилась к нулю при t → ∞ .
52
© К.Ю. Поляков, 2009
однако он может служить для оценки ошибки только при монотонном переходном процессе, когда ошибка всегда остается положительной (см. рисунок слева). Если процесс колебательный, на разных интервалах ошибка может принимать как положительные, так и отрицательные значения, поэтому использовать этот интеграл для оценки ошибки нельзя (см. рисунок справа).
Мы можем справиться с этой проблемой, если интегрировать модуль ошибки:
∞
I2 = ∫ ε(t) dt .
0
Такую оценку иногда используют при численной оптимизации. К сожалению, получить оптимальную передаточную функцию регулятора аналитически (по формулам) в этом случае не удается.
Удобнее всего минимизировать интеграл от квадрата ошибки (его также называют инте-
гральной квадратической ошибкой):
∞ |
|
I = ∫ε2 (t) dt . |
(28) |
0 |
|
Далее мы увидим, что задачу оптимизации по такому критерию удается свести к задаче фильтрации Винера.
6.2. Теорема Парсеваля
Для большинства задач в теории управления существует два типа решений – временное (когда рассматривается изменение сигналов во времени) и частотный (работа с передаточными функциями и частотными характеристиками).
Эти подходы не исключают, а взаимно дополняют друг друга, позволяя увидеть разные стороны одной задачи. Для построения оптимального фильтра Винера мы использовали операции с передаточными функциями (частотный метод Боде и Шеннона), хотя сам Винер впервые предложил решение этой задачи с помощью временного метода (на основе корреляционных функций).
Для того, чтобы использовать уже рассмотренные алгоритмы, нужно «перевести» задачу с критерием (28) в частотную область, то есть, выразить критерий через изображения сигналов по Лапласу и передаточные функции. Это позволяет сделать теорема Парсеваля, которая утверждает, что интеграл от квадрата функции ε(t) , которая равна нулю при t < 0 и стремится к ну-
лю при t → ∞ , равен интегралу от «квадрата» ее преобразования Лапласа E(s) :
∞ |
1 |
j∞ |
|
|
I = ∫ε2 (t) dt = |
∫E(s) E(−s) ds . |
(29) |
||
2πj |
||||
0 |
− j∞ |
|
Выражение E(s) E(−s) можно назвать «квадратом» потому что оно на мнимой оси (где берется интеграл), при подстановке s = jω , действительно является квадратом частотной характеристики E( jω) :
E( jω) E(− jω) = E( jω) 2 .
Заметим, что функционал (29) в нашей задаче (при известном входном сигнале) совпадает по форме (при X (s) = E(s) E(−s) ) с функционалом (19), который получен в задаче фильтрации
при случайных возмущениях. Поэтому для решения задачи можно использовать алгоритм, применявшийся при расчете фильтра Винера.
6.3. Эквивалентность двух задач
Теорема Парсеваля позволяет обнаружить связь между задачами анализа и синтеза при случайных (или стохастических) и детерминированных возмущениях.
Поскольку ошибка ε(t) стремится к нулю при t → ∞ , ее преобразование Лапласа E(s) – устойчивая функция (все ее полюса имеют отрицательные вещественные части). Если рассмат-
53
© К.Ю. Поляков, 2009
ривать E(s) как передаточную функцию формирующего фильтра, то можно построить соответствующую спектральную плотность Sε (ω) = E( jω) E(− jω) , так что
∞ |
1 |
∞ |
1 |
∞ |
|
∫ε2 (t) dt = |
∫Sω (ω) dω = |
∫Sω (ω) dω . |
|||
2π |
π |
||||
0 |
−∞ |
0 |
Таким образом, интеграл от квадрата функции ε(t) , стремящейся к нулю при t → ∞ , равен среднему квадрату случайного процесса, имеющего спектральную плотность Sε (ω) .
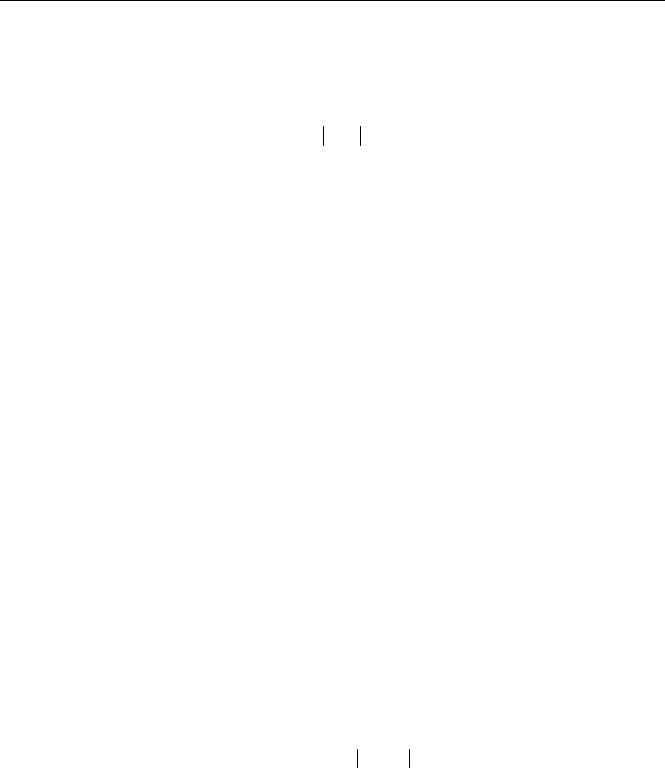
Пусть существует некоторая система с передаточной функцией W (s) . Обозначим ее входной сигнал через w(t) , а выходной – через ε(t) .
w W (s) ε
Если w – единичный центрированный белый шум, то спектральная плотность выхода ε равна Sε (s) =W (s) W (−s) , а дисперсия выхода (средний квадрат) – интегралу от спектральной
плотности по мнимой оси.
В то же время, если w – единичный импульс (дельта-функция), изображение выхода по Лапласу равно E(s) =W (s) , а интегральная квадратическая ошибка равна тому же самому инте-
гралу от W (s) W (−s) . Таким образом, вместо вычисления дисперсии выхода при белом шуме на входе можно вычислить интеграл от квадрата выходного сигнала при импульсном входе, и наоборот. Квадратный корень из этой величины называется H2 -нормой передаточной функции
W (s) :
|
1 |
j∞ |
W (s) 2 = |
∫W (s) W (−s) ds |
|
|
2πj |
− j∞ |
и вычисляется с помощью функции norm среды MATLAB.
С другой стороны, пусть передаточная функция W (s) зависит определенным образом от выбора регулятора C(s) . Тогда, как следует из сказанного, две следующие задачи оптимизации эквивалентны:
1)найти регулятор C(s) , минимизирующий дисперсию ошибки при единичном белом шуме на входе;
2)найти регулятор C(s) , минимизирующий интегральную квадратическую ошибку при по-
ступлении на вход единичного импульса (дельта-функции).
Вторая задача в теории управления называется задачей H2 -оптимизации или просто H2 - задачей (поскольку требуется обеспечить минимум H2 -нормы передаточной функции замкнутой системы), а о первой говорят как о стохастическом варианте H2 -задачи.
6.4. Разомкнутые системы
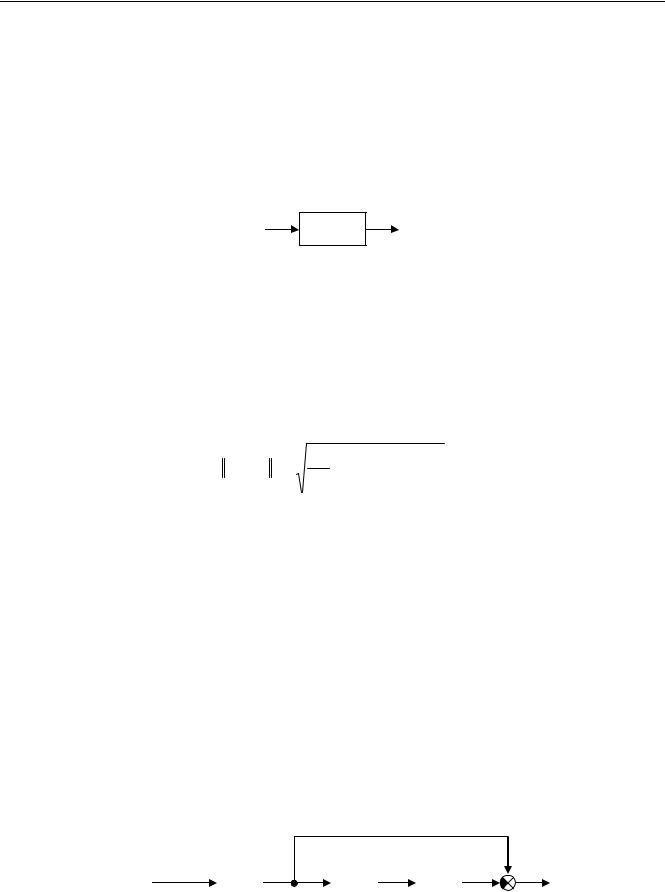
Чтобы понять особенности задачи, сначала мы рассмотрим простейшую разомкнутую систему, состоящую только из регулятора C(s) и объекта F(s) :
w = δ(t) |
|
r |
|
u |
|
z |
ε |
|
R(s) |
C(s) |
P(s) |
||||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Входной сигнал r задан в виде преобразования Лапласа R(s) , так что его можно представить как результат прохождения единичного импульса (дельта-функции δ(t) ) через звено с переда-
54

© К.Ю. Поляков, 2009
точной функцией R(s) . Такой способ общепринят при моделировании входных сигналов и по-
зволяет представить систему в стандартном виде: на входе – дельта-функция, на выходе – ошибка.
Передаточная функция системы от входа w к выходу ε равна
W (s) = (1−CP)R .
Предполагается, что все звенья устойчивы. Это значит, что все полюса функций P(s) и R(s) имеют отрицательные вещественные части и регулятор C(s) , который требуется найти, также
должен обладать этим свойством. Кроме того, регулятор должен обеспечить минимум интегральной квадратической ошибки
∞ |
1 |
j∞ |
|
I = ∫ε2 (t) dt = |
∫X (s) ds , |
||
2πj |
|||
0 |
− j∞ |
где X (s) =W W * = PP*RR*CC* − PRR*C − P*RR*C* + RR* . Подынтегральное выражение имеет
форму (18), как для задачи Винера, поэтому можно применить уже известный алгоритм поиска оптимальной устойчивой передаточной функции C(s) .
Попытаемся понять, какие результаты мы можем получить в результате оптимизации. Прежде всего, выбор регулятора из условия CP =1 сразу дает W (s) = 0 , то есть, ошибка будет
нулевой не только при ступенчатом, но и при любом другом входе. Это так называемое условие инвариантности, при котором обеспечивается идеальное слежение за эталонным сигналом. Именно такой регулятор будет получен в результате оптимизации «в лоб», если все нули передаточной функции P(s) находятся в левой полуплоскости.
Ксожалению, все не так просто. Как правило, передаточные функции реальных объектов
–строго правильные, то есть, степень их числителя меньше, чем степень знаменателя. Тогда передаточная функция регулятора C(s) =1/ P(s) будет неправильной (степень числителя больше
степени знаменателя). Как было показано при анализе задачи оптимизации при случайных возмущениях, такой регулятор неприменим в практических задачах по двум причинам:
1)регулятор содержит дифференцирующее звено, поэтому при скачкообразном изменении входного сигнала сигнал управления должен теоретически стать бесконечным;
2)регулятор усиливает высокочастотные помехи измерений вместо того, чтобы подавлять их; это делает систему неработоспособной.
Взадаче оптимизации при случайных возмущениях мы добивались «ската» частотной характеристики регулятора на высоких частотах с помощью ограничения на сигнал управления: в критерий качества вводилась дисперсия управления с некоторым весовым коэффициентом, который подстраивался методом проб и ошибок.
∞
Если формально составить критерий I = ∫[ε2 (t) + ku2u2 (t)]dt , добавив интеграл от квадрата
0
сигнала управления u(t) с весовым коэффициентом ku2 , то ничего хорошего не получится, поскольку установившееся значение u(t) при t → ∞ не равно нулю. Следовательно, интеграл
расходится и теорема Парсеваля неприменима. Оптимизация в частотной области не имеет смысла: если формально применить алгоритм синтеза, получится регулятор, для которого ошибка в установившемся режиме (при t → ∞ ) не равна нулю.
Чтобы грамотно ограничить управляющий сигнал, нужно ввести ошибку управления εu (t) , то есть отклонение фактического сигнала управления u(t) от некоторого эталонного сигнала u0 (t) , который должен быть выбран так, чтобы ошибка управления εu (t) = u0 (t) −u(t) стреми-
лась к нулю при t → ∞ . Тогда можно искать минимум критерия
∞
I = ∫[ε2 (t) + ku2εu2 (t)]dt ,
0
55