Материал: ТАУ Лекция ч2
© К.Ю. Поляков, 2009
это позволит ограничить мощность управления и при этом минимизировать ошибку слежения. Изменяя коэффициент ku , мы получим семейство Парето-оптимальных регуляторов, как и в за-
даче оптимизации при случайных возмущениях.
Как же выбрать сигнал u0 (t) ? Для простоты рассмотрим только случай ступенчатого входного сигнала. Поскольку передаточная функция C(s) устойчива, установившееся значение u∞ сигнала u(t) при t → ∞ – постоянная величина, ее можно рассчитать следующим образом.
Если вход w – это единичный импульс, то установившееся значение эталонного сигнала r(t) можно определить по теореме о конечном значении для преобразования Лапласа
r∞ = lim r(t) = lim s R(s) . |
|
t →∞ |
s→0 |
Например, если r(t) – единичный ступенчатый сигнал, для которого R(s) =1/ s , то r∞ =1. С другой стороны, для того, чтобы установившаяся ошибка была равна нулю, необходимо, чтобы предельное значение сигнала z(t) тоже было равно r∞ . Учитывая, что P(s) – устойчивая передаточная функция, имеем
r∞ = kP u∞ ,
где u∞ – нужное нам установившееся значение сигнала управления, а kP – статический коэф-
фициент усиления объекта, который вычисляется по формуле kP = lim P(s) (в среде MATLAB это
s→0
делает функция dcgain). Таким образом, в качестве эталонного сигнала управления можно
выбрать любой сигнал u0 (t) , у которого предельное значение при t → ∞ равно u∞ = r∞ , на- kP
пример, ступенчатый сигнал u0 (t) = u∞ (t > 0) , изображение которого равно U0 (s) = us∞ .
Теперь построим стандартную систему, соответствующую задаче оптимизации. Уравнения в изображениях имеют вид:
ε = Rw − Pu
kuεu = kuU0w − kuu y = r = Rw
Учитывая, что первые два уравнения определяют ошибки по выходу и по управлению, имеем
|
|
R |
|
|
− P |
, G21(s) = R и G22 (s) = 0 . |
|
G11 |
(s) = k U |
|
, G12 |
(s) = − k |
|
||
|
|
u |
0 |
|
|
u |
|
6.5. Замкнутые системы
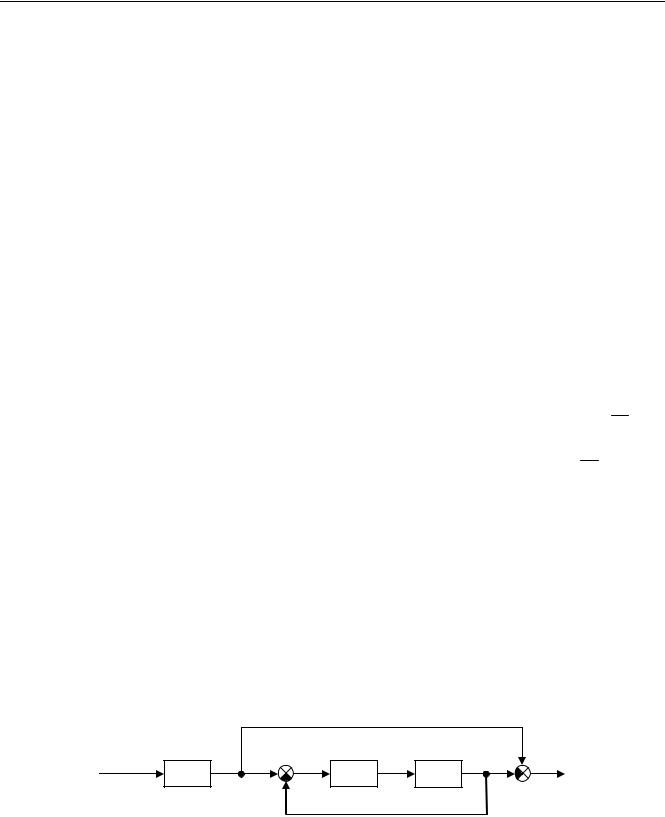
Теперь рассмотрим аналогичную задачу для замкнутой системы.
w = δ(t) |
R(s) |
r |
y |
u |
P(s) |
z |
ε |
|
|
|
C(s) |
|
|
Что изменилось с появлением замкнутого контура? Во-первых, уже не требуется, чтобы передаточные функции регулятора C(s) и объекта P(s) были устойчивыми. Во-вторых, требуется
обеспечить устойчивость замкнутой системы. В-третьих, поскольку P(s) может содержать множитель s в знаменателе (соответствующий интегрирующему звену), статический коэффи-
циент усиления kP = lim P(s) может оказаться равным бесконечности. Поэтому нужно скоррек-
s→0
тировать процедуру выбора эталонного управляющего сигнала.
56
|
|
|
|
|
|
|
© К.Ю. Поляков, 2009 |
|
Передаточная функция от входа w к ошибке ε |
равна |
C |
|
|||||
|
|
C |
|
~ |
~ |
|
||
W (s) = 1 |
− |
|
P |
R = (1 −CP)R , где C(s) = |
|
, |
||
1 +CP |
1 +CP |
|||||||
|
|
|
|
|
|
|||
~
поэтому подынтегральное выражение в критерии качества будет зависеть от C(s) , а не от C(s) .
Чтобы обеспечить устойчивость получаемой оптимальной системы в общем случае нужно использовать параметризацию стабилизирующих регуляторов (см. аналогичную задачу при случайных возмущениях).
При определении эталонного сигнала управления вроде бы все осталось по-прежнему: по
теореме о предельном значении |
|
|
|
|
|
|
|
|
|
|
r∞ |
|
|||
r = z |
∞ |
= lim s P(s) U |
0 |
(s) |
r |
= k |
P |
u |
∞ |
u |
∞ |
= |
. |
||
|
|||||||||||||||
∞ |
s→0 |
|
∞ |
|
|
|
|
kP |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Однако, проблема в том, что объект может содержать интегрирующие звенья, поэтому статиче-
ский коэффициент усиления kP = lim P(s) обращается в бесконечность. В этом случае эталон-
s→0
ный сигнал управления должен стремиться к нулю при t → ∞ . Например, можно принять u0 (t) = 0 при всех t .
Построим стандартную систему в задаче оптимизации по критерию
∞
I = ∫[ε2 (t) + ku2εu2 (t)]dt → min .
0
Уравнения системы имеют вид
ε = Rw − Pu
kuεu = kuU0w − kuu y = Rw − Pu
Учитывая, что первые два уравнения определяют ошибки по выходу и по управлению, имеем
G11 |
|
R |
|
, G12 |
− P |
, G21(s) = R |
и G22 (s) = −P . Как видим, все отличие от разомкну- |
|
(s) = k U |
|
(s) = − k |
|
|||||
|
|
u |
0 |
|
|
u |
|
|
той системы состоит в функции G22 (s) , которая в данном случае не равна нулю и представляет
собой передаточную функцию контура (без регулятора).
Можно показать, что устойчивые полюса передаточной функции объекта P(s) (и неус-
тойчивые полюса, «отраженные» от мнимой оси) становятся корнями характеристического уравнения оптимальной замкнутой системы. Вроде бы получается, что для объекта, включающего интегрирующее звено, задача не имеет решения. Однако из этого правила есть исключение: если модель входного сигнала R(s) также содержит интегрирующее звено (например, для
единичного ступенчатого сигнала R(s) =1/ s ), в ходе синтеза происходит сокращение двух
множителей и оптимальная система оказывается устойчивой.
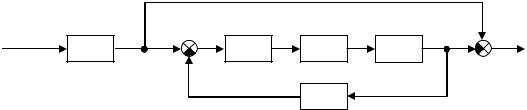
Если учитывать динамику привода и датчиков, схема немного усложняется:
w = δ(t) |
R(s) |
r |
y |
u |
z |
ε |
|
|
C(s) |
H (s) |
P(s) |
|
F(s)
В этом случае стандартная система описывается матрицами
|
|
R |
|
|
− PH |
, G21(s) = R и G22 (s) = −FPH . |
||
G11 |
(s) = k U |
|
, G12 |
(s) = |
−k |
|
||
|
|
u |
0 |
|
|
|
u |
|
57

© К.Ю. Поляков, 2009
Заключение
Шаг за шагом, мы кратко рассмотрели основные понятия теории случайных процессов, а также принципы проектирования оптимальных линейных систем при случайных и детерминированных возмущениях.
Нужно понимать, что вы прочитали не учебник, а небольшое введение, призванное познакомить с основными идеями и дать общее представление о рассматриваемых вопросах. Тот, кто серьезно собирается изучать современные методы теории управления и использовать их в своей работе, должен продолжить изучение, взяв «нормальные» учебники (см. список литературы), в которых материал изложен значительно более строго и научно.
За рамками пособия остались многие родственные темы, с которыми должен быть знаком современный специалист по автоматическому управлению. Достаточно сказать, что мы рассмотрели только линейные непрерывные системы, тогда как практически все реальные системы содержат нелинейности и управляются цифровыми регуляторами, то есть являются непрерыв- но-дискретными. Ничего не было сказано о современных методах исследования многомерных систем (со многими входами и выходами) на основе моделей в пространстве состояний.
Автор будет считать свою задачу выполненной, если читатель почувствует в себе силы не остановиться на достигнутом и продолжить самообразование.
58

© К.Ю. Поляков, 2009
Литература для последующего чтения
(в порядке увеличения количества страниц)
1.Купер Дж., Макгиллем К. Вероятностные методы анализа сигналов и систем. М.: Мир, 1989.
2.Вентцель Е.С., Овчаров Л.А. Теория случайных процессов и ее инженерные приложения.
М.: Наука, 1991.
3.Мирошник И.В. Теория автоматического управления. Нелинейные и оптимальные системы
– СПб.: Питер, 2003.
4.Бендат Дж., Пирсол А. Прикладной анализ случайных данных – М.: Мир, 1989.
5.Первозванский А.А. Курс теории автоматического управления – М.: Наука, 1986.
6.Квакернак Х., Сиван Р. Линейные оптимальные системы управления / Пер с англ. – М.: Мир, 1977.
7.Гудвин Г.К., Гребе С.Ф., Сальгадо М.Э. Проектирование систем управления. М.: Бином, Лаборатория базовых знаний, 2004.
59