Материал: ТАУ Лекция ч2
ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДЛЯ «ЧАЙНИКОВ»
Часть II. Управление при случайных возмущениях. Оптимальные
линейные системы
К.Ю. Поляков
Санкт-Петербург
2009

© К.Ю. Поляков, 2009
«В ВУЗе нужно излагать материал на высоком профессиональном уровне. Но поскольку этот уровень проходит значительно выше головы среднего студента, я буду объяснять на пальцах. Это не очень профессионально, зато понятно».
Неизвестный преподаватель
Предисловие
Эта методичка – вторая часть «Теории автоматического управления для чайников». Предполагается, что первая часть уже прочитана и понята. Основное содержание второй части – случайные процессы в системах автоматического управления и оптимальные линейные системы. Задача автора – объяснить «на пальцах» основные понятия теории и подготовить читателя к восприятию профессиональной литературы в этой области. Нужно рассматривать это пособие только как первую ступень в изучении предмета, который может стать очень интересным и увлекательным.
Список существующих учебников и монографий по теории случайных процессов и оптимальным системам управления огромен. Тем не менее, осваивать серьезную литературу современному студенту сложно. Мозг при восприятии новой информации ищет что-то знакомое, за что можно «зацепиться», и на этой основе «привязать» новое к уже известным понятиям. А если такая «зацепка» не обнаруживается – просто отключается.
В большинстве серьезных трудов материал излагается на высоком научном уровне, грамотно, точно и полно. Но читать их очень сложно, потому что такой задачи – написать понятно
– не ставилось изначально.
Как правило, в основе любой научной теории лежат достаточно простые и понятные идеи. Однако, со временем они «накрываются» таким математическим аппаратом, что читательновичок вязнет в нем, не добравшись до самих идей, которые авторам учебников кажутся очевидными. Автор этого пособия своей основной задачей считал написание понятной книжки, в которой обсуждению идей отводится ведущее место.
При любом улучшении приходится чем-то жертвовать. В данном случае в жертву были принесены строгость и полнота изложения. Математик найдет здесь много недоговоренностей и упущений, поскольку (в соответствии с целями пособия) между строгостью и понятностью выбор всегда делается в пользу понятности. Кроме того, были отброшены все второстепенные (на взгляд автора) результаты, о которых на первых порах можно не говорить без существенного ущерба для результатов инженерной практики.
Сознательно ничего не было сказано о решении рассматриваемых задач с помощью моделей в пространстве состояний. Переход в пространство состояний позволяет исследовать процессы в более общем виде, но одновременно скрывает (и теряет) важные структурные свойства системы. Например, с помощью моделей в пространстве состояний очень сложно выявить многие особенности задачи синтеза оптимальных регуляторов, которые «лежат на поверхности» при использовании классического (частотного) подхода.
Основная часть примеров связана с судовыми системами управления, что определяется личными вкусами автора. Специально для студентов-судостроителей написана глава «Морское волнение», в которой собраны базовые сведения по этой теме.
От читателя требуются небольшие предварительные знания. Нужно иметь представление о некоторых разделах курса высшей математики: теории вероятностей, производных и интегралах, комплексных числах.
Благодарности
Автор выражает глубокую признательность к.т.н. В.Н. Калиниченко, который внимательно прочитал предварительную версию пособия и высказал много ценных замечаний, которые позволили улучшить изложение и сделать его более понятным.
2

© К.Ю. Поляков, 2009
Содержание
1. |
СЛУЧАЙНЫЕ СОБЫТИЯ ..................................................................................................................................... |
4 |
|
|
1.1. Что такое случайное событие?.......................................................................................................... |
4 |
|
|
1.2. |
Случайные величины.............................................................................................................................. |
4 |
|
1.3. |
Гистограмма распределения................................................................................................................ |
4 |
|
1.4. |
Плотность распределения вероятностей.......................................................................................... |
5 |
|
1.5. |
Средние значения................................................................................................................................... |
7 |
|
1.6. |
Какие бывают распределения?............................................................................................................ |
8 |
2. |
СЛУЧАЙНЫЕ ПРОЦЕССЫ................................................................................................................................. |
11 |
|
|
2.1. Что такое случайный процесс?......................................................................................................... |
11 |
|
|
2.2. |
Стационарность................................................................................................................................. |
12 |
|
2.3. |
Эргодичность...................................................................................................................................... |
12 |
|
2.4. |
Корреляционная функция.................................................................................................................... |
13 |
|
2.5. |
Спектральная плотность.................................................................................................................. |
14 |
|
2.6. |
Гармонический сигнал......................................................................................................................... |
16 |
|
2.7. |
Белый шум............................................................................................................................................ |
17 |
3. ОЦЕНКА И МОДЕЛИРОВАНИЕ СЛУЧАЙНЫХ ПРОЦЕССОВ................................................................................. |
19 |
||
|
3.1. |
Оценка корреляционной функции....................................................................................................... |
19 |
|
3.2. |
Оценка спектральной плотности ..................................................................................................... |
19 |
|
3.3. Прохождение случайных сигналов через линейные системы.......................................................... |
24 |
|
|
3.4. |
Моделирование случайных сигналов.................................................................................................. |
26 |
4. |
МОРСКОЕ ВОЛНЕНИЕ...................................................................................................................................... |
31 |
|
|
4.1. Что такое морское волнение?........................................................................................................... |
31 |
|
|
4.2. |
Кажущиеся спектры.......................................................................................................................... |
33 |
|
4.3. Моделирование действия морского волнения на судно.................................................................... |
36 |
|
5. ОПТИМИЗАЦИЯ СИСТЕМ ПРИ СЛУЧАЙНЫХ ВОЗМУЩЕНИЯХ........................................................................... |
39 |
||
|
5.1. Что такое оптимальная система? .................................................................................................. |
39 |
|
|
5.2. |
Оптимальная фильтрация................................................................................................................. |
39 |
|
5.3. Оптимальное управление в замкнутых системах............................................................................ |
44 |
|
|
5.4. |
Стандартная система....................................................................................................................... |
46 |
|
5.5. |
Особенности задачи оптимизации.................................................................................................... |
48 |
|
5.6. |
Кривая качества.................................................................................................................................. |
50 |
6. ОПТИМАЛЬНЫЕ СЛЕДЯЩИЕ СИСТЕМЫ ........................................................................................................... |
52 |
||
|
6.1. |
Постановка задачи............................................................................................................................. |
52 |
|
6.2. |
Теорема Парсеваля.............................................................................................................................. |
53 |
|
6.3. |
Эквивалентность двух задач ............................................................................................................. |
53 |
|
6.4. |
Разомкнутые системы....................................................................................................................... |
54 |
|
6.5. |
Замкнутые системы........................................................................................................................... |
56 |
ЗАКЛЮЧЕНИЕ.......................................................................................................................................................... |
58 |
||
ЛИТЕРАТУРА ДЛЯ ПОСЛЕДУЮЩЕГО ЧТЕНИЯ.......................................................................................................... |
59 |
||
3
© К.Ю. Поляков, 2009
1. Случайные события
1.1. Что такое случайное событие?
Случайное событие – это такое событие, которое может произойти или не произойти, причем это можно выяснить только в результате опыта.
Основная характеристика случайного события – это его вероятность, то есть, частота появления события в большой серии опытов. Вероятность события – это знания, которые у нас есть до проведения опыта1.
Если в большой серии из N опытов событие X случилось nX раз, можно говорить о том, что вероятность появлении события P(X ) примерно равна
P(X ) ≈ nNX .
Это приближенное равенство (теоретически) превращается в точное при стремлении числа опытов N к бесконечности. Например, если из партии в 1000 автомобилей 50 имеют дефекты (а остальные – исправны), то вероятность купить дефектный автомобиль, выбрав его наугад из этой партии, составляет 5%.
1.2. Случайные величины
Говоря о случайных событиях, мы рассматриваем только два варианта, «случилось» или «не случилось». Однако часто результаты эксперимента можно выразить в виде числа, количественно.
Предположим, что нас интересует сопротивление резисторов, купленных в магазине. Номинальное значение сопротивления, равно, например, 100 Ом. Однако, при изготовлении всегда есть допуски, то есть, разрешенные отклонения от номинала. Например, при допуске ± 3% сопротивление взятого наугад резистора может быть любым числом в интервале от 97 до 103 Ом. Это – случайная величина. В общем случае интервал может быть и бесконечным, например, от 0 до бесконечности.
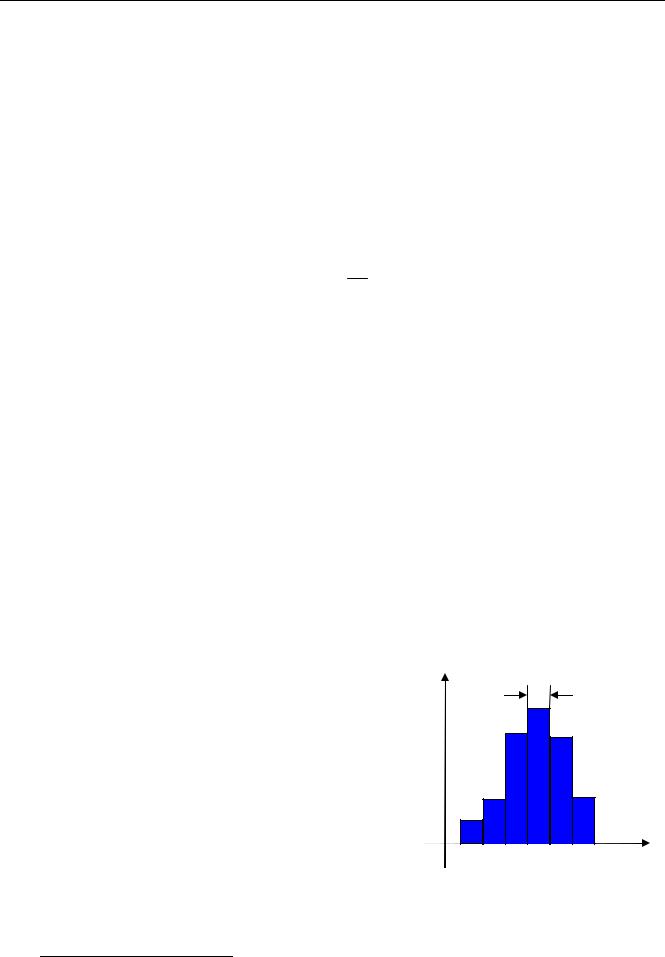
1.3. Гистограмма распределения |
|
|
|
Разобьем интервал на несколько равных частей (по- |
n |
∆ |
|
дынтервалов), выберем случайным образом N резисто- |
|
|
|
ров, измерим их сопротивления и подсчитаем, сколько |
|
|
|
резисторов «попали» в каждый интервал. Изобразим эти |
|
|
|
данные на столбчатой диаграмме, где высота каждого |
|
|
|
столбика – это количество резисторов в данном интерва- |
|
|
|
ле. Это – гистограмма распределения случайной величи- |
|
|
|
ны. В данном случае по гистограмме мы сразу видим, что |
|
97 98 99 100 101 102 103 |
|
больше всего резисторов имеют сопротивление от 100 до |
|
x , Ом |
|
101 Ом. |
|
|
|
На гистограмме можно показывать не только количество, но и долю резисторов, попавших |
|||
в данный интервал. Например, если 100 резисторов из 1000 имеют сопротивление от 97 до |
|||
1 В науке такие сведения принято называть априорными (лат. a priori, до опыта).
4
© К.Ю. Поляков, 2009
98 Ом, их доля составляет 0,1 от общего числа (10%). Тогда высоту соответствующего (первого) столбика гистограммы можно сделать равной 0,1. При этом сумма высот всех столбиков будет равна 1 (или 100%).
Кроме того, в данном случае мы выбрали ширину интервала ∆ =1, поэтому площадь всех столбиков также будет равна 1. В этом случае гистограмма называется нормированной. В ней
высота столбика с номером i равна Nni ∆ , где ni – число резисторов, «попавших» в i -ый ин-
тервал, а N – их общее количество.
1.4. Плотность распределения вероятностей
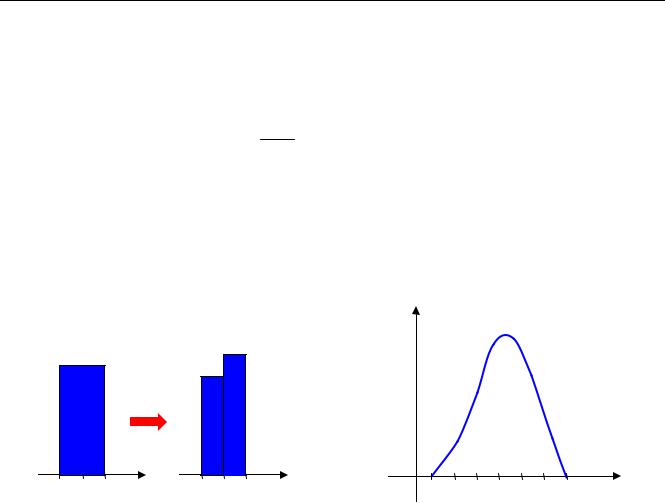
Теперь уменьшим ширину интервала ∆ в 2 раза и увеличим в 2 раза N , так чтобы произведение N ∆ осталось постоянным. Фактически каждый исходный интервал мы разбили на 2 равных подынтервала (рисунок слева). Через n11 и n12 обозначим количества резисторов в первом и втором подынтервалах.
|
|
|
|
|
|
f (x) |
|
|
|
|
n1 |
|
n11 |
n12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
97 |
98 |
x , Ом |
97 |
98 |
x , Ом |
97 |
98 |
99 100 101 102 103 |
x , Ом |
|
|
|
|
|
|
|
Поскольку общее количество резисторов удвоилось, в интервал [97;98] (то есть в два новых подынтервала) попало примерно в 2 раза больше резисторов, то есть, n11 +n12 ≈ 2n1 . Поэтому вы-
сота обоих столбиков будет (скорее всего) близка к тому, что было раньше. Мы только уточнили распределение резисторов внутри исходного интервала [97;98] .
Такое деление можно выполнять и для нормированной гистограммы (с единичной площадью). В пределе при ∆ → 0 (и N → ∞ ) мы получаем прямоугольники бесконечно малой ширины. Через их «вершины» можно провести некоторую линию. Она представляет собой график функции, которую называют плотностью распределения вероятностей (или просто плотностью распределения) случайной величины X и обозначают f (x) (здесь x – одно из допусти-
мых значений случайной величины X ).
Так как выполняется условие нормировки, площадь под этой линией равна 1, она может быть вычислена как интеграл от функции f (x) на всем множестве ее допустимых значений.
Если заранее известно, что величина x находится в некотором интервале [a;b] , получаем
∫b f (x) =1. В общем случае (если случайная величина может принимать любые вещественные
a
значения), справедлива формула
∞∫ f (x) dx =1 .
−∞
5