Материал: ТАУ Лекция ч2
© К.Ю. Поляков, 2009
4. Морское волнение
4.1. Что такое морское волнение?
Морское волнение – это колебания поверхности воды, вызванные ветром (а также приливами, отливами и другими причинами). Простейшая модель морского волнения – гармонические колебания поверхности, когда волновая ордината (вертикальная координата точек поверхности) изменяется по закону синуса. Такое волнение называют регулярным (синяя штриховая линия на рисунке).
r
1
0 |
t |
Однако, в самом деле волновая ордината меняется по более сложному закону, его можно (опять-таки приближенно) представить как сумму большого количества гармоник (синусоид) с разными амплитудами и фазами (теоретически – это сумма бесконечного числа гармоник). Это так называемое нерегулярное волнение, которое чаще всего описывается как случайный процесс. Можно предположить, случайные волновые ординаты распределены по нормальному закону, и это действительно подтверждается экспериментами. При этом плотность распределения высот волн подчиняется закону Рэлея.
В нашей стране для характеристики волнения используется высота волны 3%-ной обеспеченности h3% – это высота волны, вероятность превышения которой составляет 3%. Значения h3% определяются по таблице в зависимости от интенсивности волнения (в баллах):
Волнение, |
h3% , м |
Волнение, |
h3% , м |
Волнение, |
h3% , м |
|
баллы |
баллы |
баллы |
||||
|
|
|
||||
1 |
0 – 0,25 |
4 |
1,25 – 2,0 |
7 |
6,0 – 8,5 |
|
2 |
0,25 – 0,75 |
5 |
2,0 – 3,5 |
8 |
8,5 – 11 |
|
3 |
0,75 – 1,25 |
6 |
3,5 – 6,0 |
9 |
более 11 |
По значению h3% можно определить дисперсию волновой ординаты Dr . Известно, что вы-
сота волны h – это случайная величина, распределенная по закону Рэлея: f (h)
|
h |
|
|
h |
2 |
|
|
|
f (h) = |
|
− |
|
|
h ≥ 0 . |
|||
4D |
8D |
|||||||
exp |
, |
|||||||
|
r |
|
|
|
r |
|
||
0 |
h3% |
h |
|
Вероятность превышения некоторого уровня h3% можно рассчитать как интеграл от плотности вероятности на интервале [h3% ;∞) :
31
© К.Ю. Поляков, 2009
|
|
∞ |
|
|
h |
|
|
h |
2 |
|
|
|
|
h |
2 |
|
|
h3% |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
p(h > h3% ) = ∫ |
|
|
|
− |
|
|
|
|
− |
|
|
|
|
|
− |
h3% |
|
||||||
|
4D |
8D |
|
8D |
|
|
8D |
||||||||||||||||
|
exp |
dh = exp |
|
|
|
= exp |
. |
||||||||||||||||
|
|
h |
|
|
r |
|
|
|
r |
|
|
|
|
r |
|
∞ |
|
|
r |
||||
|
|
3% |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Эта вероятность должна быть равна 3% или 0,03; поэтому |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
2 |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
h3% |
|
|
|
|
|
|
|
|
|
h3% |
|
|
|
|
|
|
|
||||
exp |
− |
|
|
= 0,03 |
|
|
|
Dr = − |
|
|
|
≈ |
0,0356 h3% . |
|
|||||||||
8D |
|
|
8ln 0,03 |
|
|
||||||||||||||||||
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
среднюю частоту волнения |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
Значение h3% определяет также средний период волнения T |
, |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||
ω |
|
и частоту максимума спектра ωm : |
|
|
2π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
T ≈ 3,1 h , |
ω |
= |
|
, ω |
m |
≈ 0,71 |
ω |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
3% |
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Существуют два типа моделей нере- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
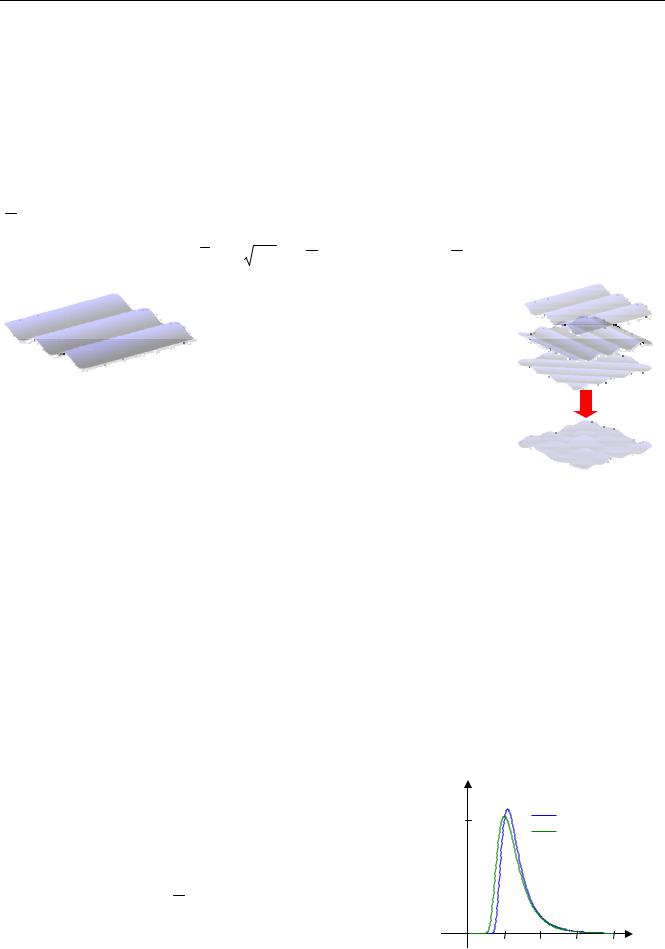
гулярного волнения, |
двухмерная и |
трех- |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
 мерная. В двухмерной модели предполага-
мерная. В двухмерной модели предполага- 



ется, что гребни волн имеют бесконечную длину и перемещаются параллельно друг
другу в одном направлении (рисунок слева). Каждый, кто видел реальное волнение, знает, что на практике это не так. Более точная (но и более сложная) трехмерная модель учитывает сложение множества двухмерных волн, идущих в разных направлениях (рисунок справа).
Строго говоря, волнение – это нестационарный процесс. Оно начинается с ряби, затем ветер за счет завихрений потоков воздуха разгоняет волны. Но если ветер с постоянными свойствами действует достаточно длительно время (несколько часов) на большой акватории (десятки километров), можно говорить о развитом (установившемся) волнении, которое считают стационарным эргодическим процессом. Такой подход позволяет использовать методы анализа случайных процессов на основе корреляционных функций и спектральных плотностей.
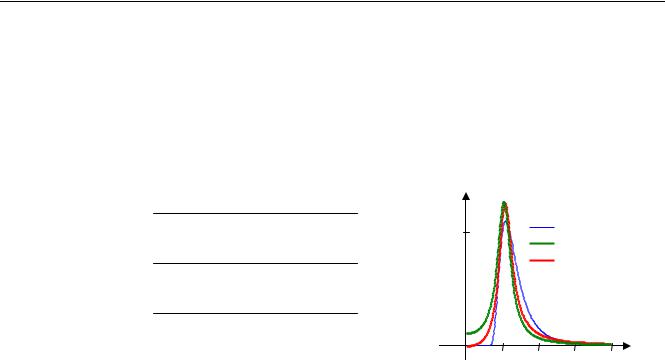
Под термином «спектр морского волнения» обычно понимают спектральную плотность волновой ординаты. С экспериментальными данными лучше всего согласуются экспоненциальные спектры вида
Sr (ω) = Aω−k exp(− Bω−n ),
где параметры A , B характеризуют интенсивность волнения, а k и n зависят от его особенно-
стей. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вообще говоря, спектры волнения в разных районах от- |
S |
r |
(ω) , м2/Гц |
|
|
|
||||||||||
личаются. Если информации недостаточно, |
рекомендуют ис- |
|
|
|
|
|
|
|||||||||
пользовать типовой спектр Пирсона и Мошковица ( k = 5 и |
0,5 |
|
|
спектр МКОБ |
||||||||||||
n = 4 ), рекомендованный 12-й Международной конференци- |
|
|
||||||||||||||
|
|
спектр Неймана |
||||||||||||||
ей опытовых бассейнов (МКОБ): |
|
|
|
|
|
|
|
|
|
|
|
|
||||
Sr (ω) = 7,06π |
D |
|
ω |
5 |
|
|
ω |
4 |
|
|
|
|
|
|
|
|
r |
|
|
m |
exp − |
1,25 |
|
m |
. |
|
|
|
|
|
|
|
|
|
ω |
|
ω |
|
|
ω |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Известно множество других выражений для спектров. |
|
|
0 |
1 |
2 |
3 |
ω , рад/c |
|||||||||
Часто используют, например, спектр Неймана: |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|||||||||
32
© К.Ю. Поляков, 2009
|
|
|
4,575 |
|
|
Sr (ω) = 2π |
1,26 exp − |
. |
|||
2 0,8 |
|||||
|
ω |
|
ω h |
|
|
|
|
3% |
|||
На рисунке справа показаны графики спектра МКОБ (синяя линия) и спектра Неймана (зеленая линия) для волнения 4 балла ( h3% = 2 м).
Экспоненциальные спектры хорошо согласуются с экспериментальными данными, однако неудобны для моделирования и расчета систем управления. Вместо них используются дробно-
рациональные спектры |
|
|
2 |
/Гц |
|
||
|
|
2D α(α2 + β2 +ω2 ) |
|
Sr (ω) , м |
|
||
1: |
Sr (ω) = |
, |
|
|
|
|
|
r |
|
|
|
|
|||
ω4 + 2(α2 −β2 )ω2 +(α2 + β2 )2 |
0,5 |
|
|
спектр МКОБ |
|||
|
|
|
|
|
|
спектр 1 |
|
|
|
4D α(α2 + β2 ) |
|
|
|
|
|
2: |
Sr (ω) = |
, |
|
|
|
спектр 3 |
|
r |
|
|
|
||||
ω4 + 2(α2 −β2 )ω2 +(α2 + β2 )2 |
|
|
|
|
|||
3: |
Sr (ω) = |
4D αω2 |
|
|
|
|
|
r |
|
|
|
|
|
||
ω4 + 2(α2 −β2 )ω2 +(α2 + β2 )2 . |
|
|
|
|
|||
Здесь |
Dr – дисперсия волновой ординаты, α – коэф- |
0 |
1 |
2 3 ω , рад/c |
|||
фициент затухания и |
β – угловая частота корреляционных |
|
|
|
|
||
функций. Для развитого морского волнения β =1,02ωm и α = 0,21β .
На рисунке справа показаны спектр МКОБ и дробно-рациональные спектры 1 и 3 (кривая для спектра 2 проходит между ними). Графики дробно-рациональных спектров проходят выше экспоненциальных на низких частотах, которые больше всего влияют на поведение инерционных морских объектов (судов). Поэтому считается, что использование дробно-рациональных спектров приводит к несколько завышенным оценкам параметров движения (качки, рыскания).
Заметим, что спектр 3 равен нулю на нулевой частоте, так же, как и экспоненциальные спектры. Однако, если учитывать трехмерность волнения, по современным представлениям спектр на нулевой частоте в большинстве случаев отличен от нуля. Это оправдывает использование дробно-рациональных спектров 1 и 2.
4.2. Кажущиеся спектры
До этого мы рассматривали спектры волнения без учета движения судна. Очевидно, что двигаться против волнения труднее, чем «по волне», а движение судна «лагом» к волне (при бортовой волне) вызывает сильную качку. Это означает, что эффект действия волнения на судно зависит от скорости и направления его движения по отношению к основному направлению распространения волн. Математически это выражается в изменении спектральной плотности возмущения.
В физике хорошо известен эффект Доплера, который состоит в том, что при движении датчика измеренная им частота волны изменяется в зависимости от его собственной скорости
|
|
v |
– истинная частота волны, ωk – кажущаяся (измеренная) час- |
|
по закону ωk = ω 1 |
+ |
|
, где ω |
|
|
||||
|
|
u |
|
|
тота, v – скорость движения датчика в направлении источника волн, а u – скорость распространения самих волн. При движении судна против волнения ( v > 0 ) кажущаяся частота волн будет больше, чем истинная, а при движении «по волнению» ( v < 0 ) – меньше истинной.
33
© К.Ю. Поляков, 2009
Из гидродинамики известно, что скорость распространения волны с частотой ω (на глу-
бокой воде) равна u = ωg . Кроме того, если судно движется со скоростью V (в м/с) по углом ξ к
направлению распространения волн (считается, что ξ = 0 соответствует движению против волны), оно приближается к источнику со скоростью v =V cosξ . Таким образом, формула преоб-
разования истинной частоты в кажущуюся приобретает вид ω |
|
|
+V cosξ |
|
k |
= ω 1 |
ω . |
||
|
|
g |
|
|
|
|
|
|
Если судно «убегает» от волн, то при увеличении скорости кажущаяся частота, вычисленная по этой формуле, оказывается отрицательной – это означает, что судно обгоняет волны. Поэтому для того, чтобы работать только с положительными частотами, нужно взять модуль выражения в правой части. Окончательно получаем
|
a = |
V cosξ |
ωk = |
|
ω (1+aω) |
|
, |
(8) |
|
|
|
|
|||||||
где |
– фактор относительного движения. Итак, составляющую волнения с частотой |
||||||||
g |
|||||||||
|
|
|
|
|
|
|
|
||
ω судно воспринимает с кажущейся частотой ωk .
Чтобы построить кажущийся спектр, нужно научиться решать обратную задачу – по заданной кажущейся частоте ωk определить частоту (или частоты!) исходного спектра, которые судно воспринимает как ωk . Используя (8), формально получаем два квадратных уравнения
aω2 +ω +ωk = 0 |
и aω2 +ω −ωk = 0 , |
(9) |
Нас интересуют все вещественные и положительные решения этих уравнений (фактиче- |
||
ски таких «подходящих» частот может быть от одной до трех). |
|
|
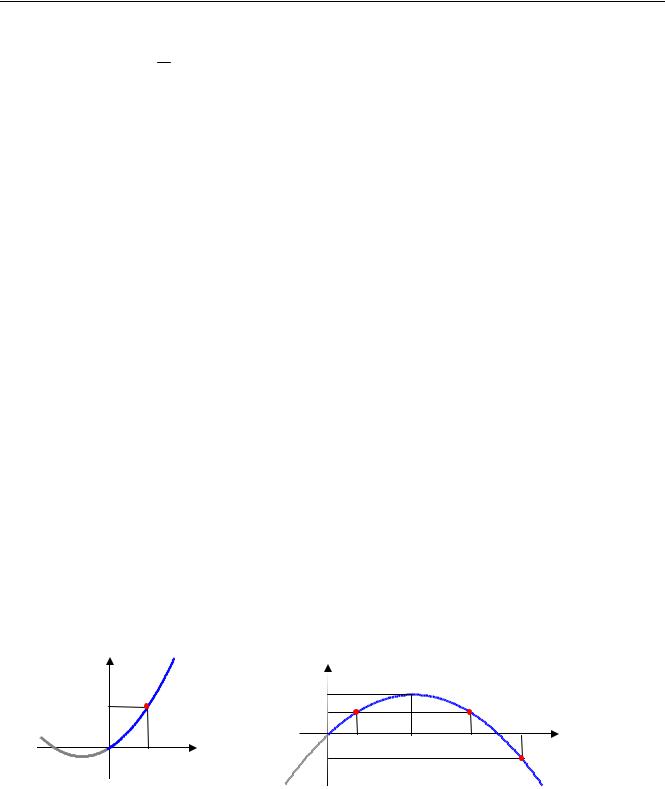
Предположим, что судно идет под острым углом к волне, так что cosξ > 0 и a > 0 . В этом |
||
случае первое уравнение в (9) заведомо |
не имеет подходящих |
решений (поскольку |
aω2 +ω ≥ 0 ), а второе имеет только одно положительное решение. На рисунке слева изображен график функции ωk = aω2 +ω , который ясно показывает, что одной кажущейся частоте ωk1 > 0
соответствует только одна частота ω1 |
исходного спектра и наоборот. |
|
||
ωk |
|
ωk |
a < 0 |
|
|
a > 0 |
ω0ω/k41 |
|
|
ωk1 |
|
ω3 |
||
|
|
0 ω1 ω0 / 2 |
ω2 ω0 |
|
0 |
ω1 ω |
ω |
||
−ωk1 |
|
|
||
Теперь предположим, что судно идет под тупым углом к волне («убегает» от волн), так
что cosξ < 0 и a < 0 . На рисунке справа показан график функции ωk |
= aω2 +ω для этого слу- |
чая. Используя знания школьной математики, легко увидеть, что |
парабола пересекает ось |
ωk = 0 |
при ω =ω0 |
= − |
1 |
|
ω |
0 |
; |
ω |
0 |
|
a |
, а ее вершина находится в точке |
|
|
. Все волны с частотами |
||||||
|
|
|
|
2 |
|
4 |
|
|||
больше ω0 судно опережает, поэтому кажущаяся частота становится отрицательной.
34
© К.Ю. Поляков, 2009
Если интересующая нас кажущаяся частота ωk1 меньше максимальной (равной ω0 / 4 ), то энергия волн на трех частотах (ω1 , ω2 и ω3 ) складывается на частоте ωk1 кажущегося спектра. Если ωk1 > ω0 / 4 , остается только оно решение – ω3 .
Нужно понимать, что мощность волнения (средний квадрат волновой ординаты) не зависит от скорости движения судна. Для движущегося объекта эта мощность просто перераспределяется по частотам. Поэтому при расчете кажущегося спектра важно сохранить мощность. Это значит, что средние квадраты волновой ординаты для исходного и кажущегося спектров должны быть равны:
|
1 |
∞ |
|
1 |
∞ |
|
|
|
∫Sr (ω) dω = |
∫Srk (ωk ) dωk . |
|
|
|||
|
π |
π |
|
|
|||
0 |
0 |
|
|
||||
Чтобы добиться этого, приравнивают «элементарные» мощности: |
|
|
|||||
Sr (ω) dω = Srk (ωk ) dωk , |
что дает Srk (ωk ) = Sr (ω) |
dω |
. |
||||
|
|||||||
|
|
|
|
|
|
dωk |
|
Выражение dω/dωk в правой части последнего равенства можно найти как обратное значение
для производной (при a > 0 ) |
|
|
|
|
|
|
|
|
|
dωk |
= |
d |
(aω2 +ω)= 2aω +1, |
так что |
dω |
= |
1 |
|
. |
dω |
|
2aω +1 |
|||||||
dω |
|
|
|
dωk |
|
||||
При a < 0 нужно взять эту производную по модулю (чтобы все составляющие спектра складывались, а не вычитались). В самом сложном случае, когда на частоте ωk1 кажущегося спектра складываются три составляющие исходного спектра (соответствующие частотам ω1 , ω2 и ω3 ), при численном пересчете спектра имеем:
Srk (ωk1 ) = |
Sr (ω1 ) |
+ |
Sr (ω2 ) |
+ |
|
Sr (ω3 ) . |
|
|
|
|
1+2aω1 |
|
1+2aω2 |
|
|
1+2aω3 |
|
|
|
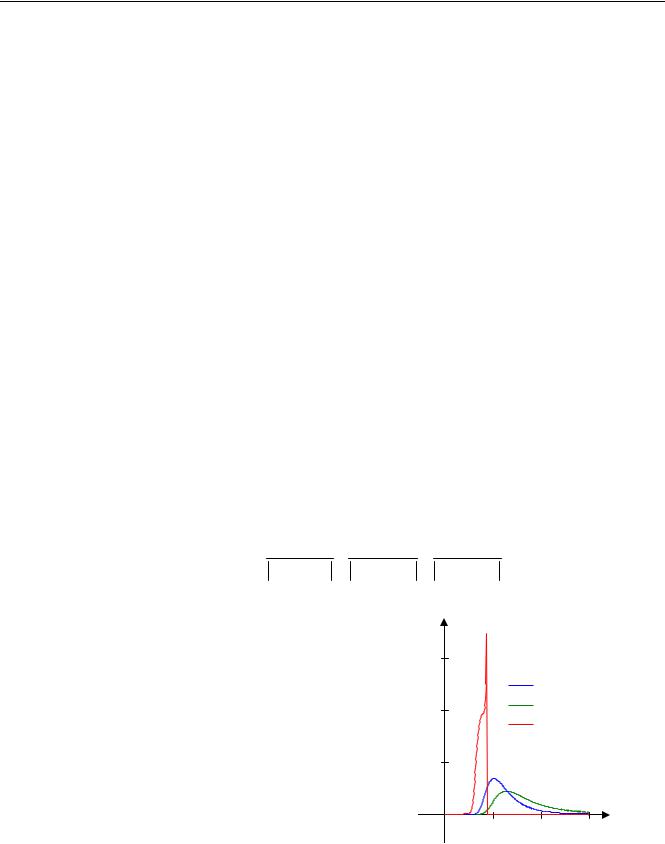
На рисунке показаны спектры, полученные преобра- |
S |
r |
(ω) , м2/Гц |
|
|
||||
зованием спектра МКОБ (Пирсона и Мошковица) при |
|
|
|
|
|
||||
разных углах встречи с волной (волнение |
4 |
балла, |
3 |
|
|
|
|
||
h3% = 2 м, скорость судна 4 м/с). |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
ξ = 0 |
|
|
При встречном волнении (зеленая линия) максимум |
|
|
|
|
|
||||
спектра смещается в область высоких частот, |
спектр |
2 |
|
|
ξ = 45o |
|
|||
|
|
ξ =135o |
|||||||
«размазывается» по оси ω . Учитывая, что инерционный |
|
|
|
|
|||||
|
|
|
|
|
|
||||
объект подавляет высокочастотные возмущения, можно |
1 |
|
|
|
|
||||
считать, что влияние волнения на судно уменьшается. |
|
|
|
|
|
|
|||
При попутном волнении (красная линия) спектр |
|
|
|
|
|
|
|||
имеет разрыв (скачок), такие разрывы подтверждаются |
|
0 |
1 |
2 |
3 ω , рад/c |
||||
экспериментально. Вся энергия волн сосредоточена в уз- |
|
|
|
|
|
|
|||
кой полосе на низких частотах. При этом возмущение оказывает очень сильное влияние на судно, и это влияние сложно (а иногда и невозможно) скомпенсировать с помощью управления. Поэтому движение на попутном волнении – это один из самых сложных режимов движения в точки зрения стабилизации курса.
35