Материал: Основы теории управления. Лопатин Р.С., Федорков Е.Д
- САУ с экстремальной настройкой коррекции (оптимальные динамические свойства системы);
- САУ экстремального регулирования. (оптимальные статические свойства системы).
1.4.6. Методы исследования и расчет самонастраивающихся сау
Для исследования и расчета самонастраивающихся САУ могут быть использованы все инженерные методы ТАУ. Однако их применимость, из-за наличия контура самонастройки, естественно ограничена.
Итак, для расчета могут быть использованы следующие методы расчета:
- Гармонической линеаризации;
- Фазового пространства;
- Графо-аналитические;
- Статистические;
- Линейной теории;
- Математического моделирования и др.
Основными этапами, выполняемыми при расчете и исследовании самонастраивающихся систем, являются:
- Обоснование необходимости применения самонастройки;
- Расчет процесса самонастройки;
- Обеспечение устойчивости;
- Расчет выхода на экстремум;
- Обеспечение устойчивости в области экстремума;
- Определение показателей качества динамики самонастраивающейся системы и др.
Обоснование самонастройки может быть осуществлено аналитически, экспериментально либо на основании физических соображений. Основными условиями при этом считаются экономическая эффективность, достигаемый за счет применения самонастройки, либо невозможность создания системы с постоянными параметрами для обеспечения требуемой точности управления, заданного запаса устойчивости и качества переходного процесса.
Допустим имеем САУ вида рис.9.
Рис.9. Система автоматического управления
![]() – коэффициент
усиления и постоянная времени ОУ,
изменяющиеся в результате изменения
внешних условий.
– коэффициент
усиления и постоянная времени ОУ,
изменяющиеся в результате изменения
внешних условий.
Характеристическое уравнение САУ
|
|
По критерию Гурвица условие устойчивости имеет вид:
|
|
Если известно, что
![]() =0,01сек,
а
=0,01сек,
а
![]() =0,2сек,
то максимально допустимое значение
коэффициента усиления из условия (1.14)
=0,2сек,
то максимально допустимое значение
коэффициента усиления из условия (1.14)
|
|
Если известно, что
диапазон изменения
![]() ,
тогда из выражения (1.15)
,
тогда из выражения (1.15)
![]() .
Таким образом, для того, чтобы САУ была
устойчива необходимо при изменении
свойств ОУ изменять коэффициент усиления
УУ в диапазоне
.
Таким образом, для того, чтобы САУ была
устойчива необходимо при изменении
свойств ОУ изменять коэффициент усиления
УУ в диапазоне
![]() .
.
1.5. Математические модели объектов и систем управления
1.5.1. Общие замечания по объектам
Сигналы управления и возмущения в общем случае могут быть не детерминированные а случайные, поэтому приходиться прибегать к статистическим методам исследования систем автоматического управления (САУ) [9]. Кроме того часть объектов функционирует и работает в конфликтных ситуациях.
Рассмотрим график изменения выходного вектора САУ во времени.
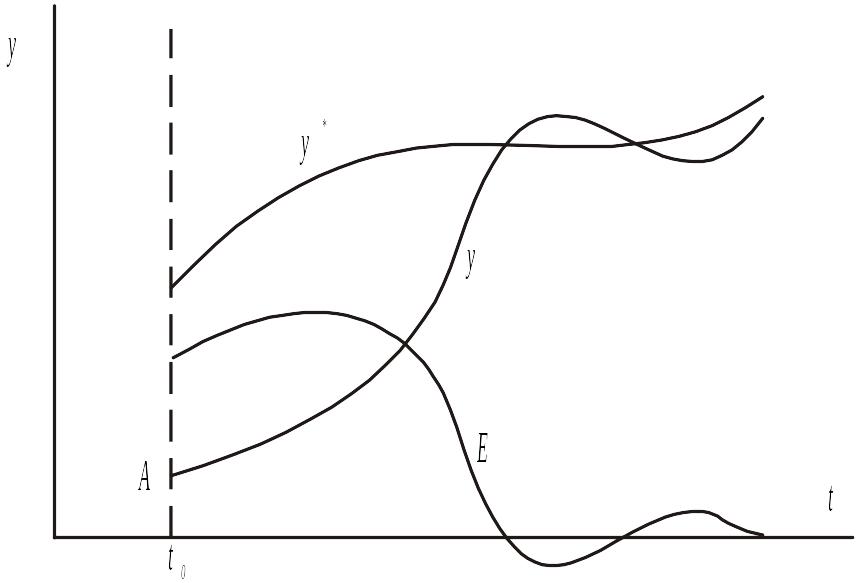
Рис.10. Изменение выходного вектора системы автоматического управления во времени.
где y - желаемая траектория объекта управления.
В начальный момент t0 система находилась в точке A. При включении системы управления выходная координата y под действием управляющих сигналов выходит на требуемую (желаемую) траекторию y*.
E(t) = y*(t) – y(t)
Разность называется ошибкой или рассогласованием САУ.
Задача теории автоматического управления (ТАУ) состоит:
Научиться проектировать системы управления, обеспечивающие минимальные допустимые для данного объекта ошибки E(t);
Научиться проектировать системы управления, которые обеспечивают выход системы на желаемую траекторию за минимальное время, т.е. решается задача быстродействия соответствующим выбором системы управления [9].
Итак, в самом общем случае САУ, выполняющая поставленные выше задачи, может быть представлена в виде структурной схемы.
Рис.11. Структурная схема
На вход управляющего устройства (УУ) поступает:
задающее воздействие g;
информация о текущем состоянии объекта в виде выходной величины y;
информация о действующем на ОУ возмущении F.
УУ вырабатывает, в соответствии с полученной информацией, определенное (по заданному алгоритму) управляющее воздействие u на объект.
В свою очередь УУ в общем случае состоит из:
- чувствительного устройства (ЧУ);
- вычислительного устройства (ВУ);
- исполнительного устройства (ИУ).
Чувствительное устройство (измерительные устройства, датчики) служат для измерения и преобразования подаваемых на УУ воздействий g, y, F.
Вычислительное устройство реализует алгоритм работы УУ. В простейших случаях оно осуществляет простые математические операции, такие как сравнения, т.е. разность g – y – F, операции интегрирования и т.п.
В более сложных случаях вычислительное устройство может представлять собой ЭВМ и даже комплекс ЭВМ.
Исполнительные устройства предназначены для непосредственного управления ОУ. Например, для согласования мощности ВУ и ОУ необходимо применить усилитель мощности. В тех случаях, когда ИУ отсутствует, САУ называется прямого регулирования.
При наличии ИУ САУ называется непрямого регулирования.
1.6. Принципы построения систем автоматического управления
1.6.1. Принцип возмущения или регулирование по возмущению
Рис.12. Регулировка по возмущению
В системах построенных по данному принципу выходная координата y инвариантна по отношению к возмущению F, т.е. действующие на объект возмущения не приводят к отклонениям выходной координаты от требуемого закона.
Принцип действия таких систем состоит в том, что возмущения, действующие на ОУ заранее измеряются измерительным элементом (ИЭ) и подаются на вход УУ, которое вырабатывает сигнал управления уже с учетом действующего на объект возмущения.
Недостатком данного принципа является то, что для качественного управления необходимо иметь большое число предварительной информации о возмущающих воздействиях, что ограничивает применение таких систем.
1.6.2. Принцип отклонения или регулирование по отклонению (принцип обратной связи)
Рис.13. Регулировка по отклонению (принцип обратной связи)
Где:
![]()
![]()
В данном случае ошибка системы:
(t) = g(t) – y1(t) , (1.16) |
(1) |
Принцип действия: Пусть при увеличении возмущения F выходная координата объекта y уменьшается, что приводит к уменьшению y1, следовательно возрастает ошибка из выражения (1) и соответственно управляющее воздействие u.
Определения: Связь выхода звена САУ с его входом называется обратной связью (ОС).
- Связь выхода системы с её входом называется главной обратной связью (ГОС).
- Если сигнал ОС вычитается из входного, то ОС называется отрицательной обратной связью (ООС).
- Если сигнал ОС складывается со входным, то ОС называется положительной обратной связью (ПОС).
Необходимо отметить, что в принципе отклонения главная обратная связь должна быть всегда отрицательной, т.е.
(t) = g(t) – y(t) , (1.17) |
(2) |
Если на объекте управления можно выбрать одно или два наиболее сильно действующих возмущения, которые можно измерить, то используют комбинированные системы, применяя оба названных принципа.
Рис.14. Комбинированные системы
1.6.3. Принцип дуального управления или принцип
автоматической оптимизации
Рис.15. Принцип дуального управления
Дуальное управление исследует двойную цель -изучение объекта и одновременное приведение его к требуемому режиму.
Задача: Создать такую систему, чтобы при заданном управлении U и действии меняющихся возмущений, некоторый параметр объекта был экстремальный.
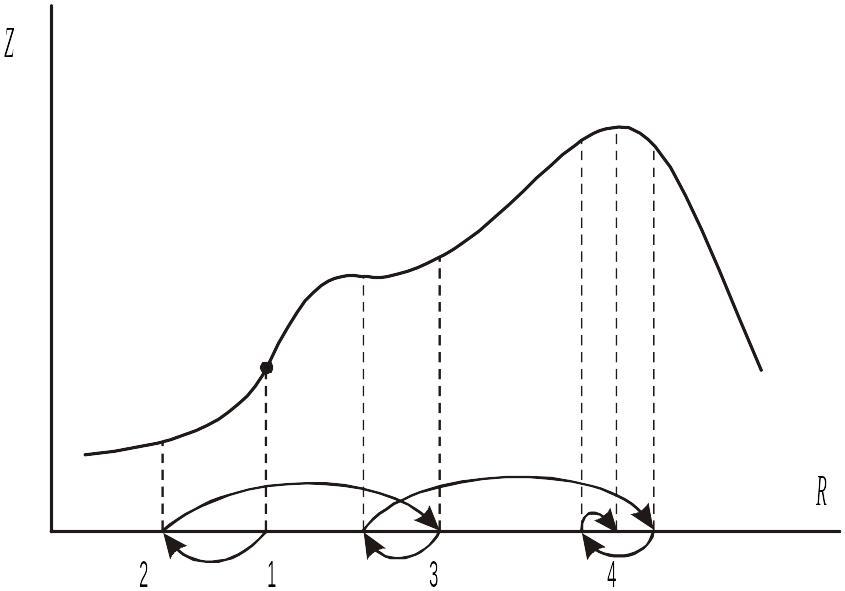
Рис.16. Характеристика ОУ при регулировании