Материал: НЕФТЯНОЙ ГЕОЛОГИИ
СПБГУАП группа 4736 https://new.guap.ru
Найдем параметры системы, при которых достигается минимум импеданса. В этом случае смещения от положения равновесия будут максимальны:
d |
(ω |
|
z |
|
) = |
d |
ω [α2 +(ω m − K /ω)2 ]1/ 2 = 0 |
|
|
|
|||||||
dω |
dω |
|||||||
|
|
|
|
|
|
2ω [α2 + 2m(ω2m − K)] = 0 .
Отсюда: либо ω = 0 , либо α2 + 2m(ω2m − K ) = 0 , но ω не может быть равной 0, так как это характеризует отсутствие движения. По времени наступило состояние вынужденных колебаний, когда собственные колебания
полностью затухли: |
ω2 |
= K − |
α2 |
= ω2 − |
α2 |
. Следовательно, резонанс смещения наступает при частоте |
||||||||||||||
2m2 |
2m2 |
|||||||||||||||||||
|
|
|
|
|
1 |
|
m |
|
|
0 |
|
|
|
|
|
|
|
|||
ω2 |
= ω |
|
1 − |
α2 |
|
|
меньшей чем ω |
|
. Если α |
мало или m велико, то ω ≈ω |
|
и частота резонанса одна и та |
||||||||
|
2m2ω02 |
|
|
|||||||||||||||||
1 |
|
0 |
|
|
|
|
0 |
|
|
|
1 |
|
|
0 |
|
|
||||
же. Максимальное значение смещения при этом определяется формулой x |
MAX |
= |
|
F0 |
. |
|||||||||||||||
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω α |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
Рис. 12.
На рис. 12 приведена зависимость смещения x от ω при разных значениях α . При малых α амплитуда |
|||||||||||
|
|
|
|
|
|
|
|
|
α |
|
|
смещения велика. Так как амплитуда есть A = A e− |
|
t , то энергия уменьшается как квадрат этой величины: |
|||||||||
2m |
|||||||||||
|
|
|
|
|
|
0 |
|
|
|
||
|
α |
α |
|
|
|
α |
|
||||
A2 = A2e− |
|
t 2 |
= A2e−m t или: |
E = E |
|
e− |
|
t 2 . Время, необходимое для уменьшения энергии в e раз равна |
|||
2m |
0 |
2m |
|||||||||
0 |
|
|
0 |
|
|
|
|
|
|
|
|
t = m секунд. За это время фаза осциллятора изменится на |
ωm радиан. |
||||||||||
α |
|
|
|
|
|
|
|
|
α |
||
Определим добротность системы Q =ωm /α , как число радиан, на которое изменяется фаза системы с
затуханием при уменьшении энергии колебаний в e раз. Обычно Q велико и является постоянной величиной. Можно сказать иначе: добротность есть число периодов, которое необходимо для уменьшения энергии системы в e раз.
1.2.5.Диссипация энергии.
Найдем производную от полной энергии:
dE |
= |
d |
1 |
& |
2 |
+ |
1 |
Kx |
2 |
|
& && |
&& |
& |
&& |
& |
|
|
|
|
|
|
|
|
|
|||||||||
dt |
|
2 |
mx |
|
2 |
|
= x(mx |
+ Kx),но mx |
+αx + Kx = 0 отсюда |
mx |
+ Kx = −αx , подставим и |
|||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
||||
получим, что скорость потери энергии dEdt = −αx&2 , то есть эта скорость равна работе, совершаемой системой против силы трения за единицу времени.
Сводка основных результатов.
Энергия: 12 mx&2 + 12 Kx2 = 12 ma2ω2 = 12 Ka2 = const.
14
СПБГУАП группа 4736 https://new.guap.ru
K = a sin(nδ / 2) ;α = (n −1)δ / 2 - сложение n колебаний с постоянным сдвигом фаз на δ <<1. sinδ / 2
Логарифмический декремент затухания:
δ = 2αmt
Постоянная времени: t = 2αm .
Добротность: Q = mαω .
Потеря энергии: E& = −αx&2 .
Амплитуда – максимальное смещение из положения равновесия. Квадрат частоты – это сила приходящаяся на единицу массы и единицу смещения.
3 Вынужденные колебания.
3.1 Импеданс механической системы.
Механический импеданс определяется как сила, необходимая для, того, чтобы сообщить осциллятору единичную скорость, то есть Z = F / v или F = v Z .
Из свойств колебаний, вспомним, что между силой и скоростью движения существует разность фаз, поэтому импеданс можно записать в виде:
Z=α + i ωm − k =α + iX
ω
Z = |
|
Z |
|
eiϕ tgϕ = |
x |
|
|
|||
|
|
|
||||||||
|
|
α |
|
|||||||
|
|
|
|
|
|
|
|
|
||
|
Z |
|
= [α2 + (ωm − k /ω)2 |
]1/ 2 |
||||||
|
|
|||||||||
α - сопротивление движению.
Перейдем теперь непосредственно к анализу вынужденного колебания. Пусть к осциллятору приложена переменная сила F = F0 cosωt , где F0 - амплитуда этой силы, ω - частота ее изменения.
Механическое уравнение движения (динамический баланс сил) имеет вид:
. Как известно, решение этого уравнения состоит из двух частей. Одна часть –
“нестационарный член”, который затухает со временем и является решением однородного уравнения свободных затухающих колебаний. Вторая часть - “стационарный” член, который описывает поведение осциллятора после затухания нестационарного члена.
Перепишем уравнение в другом виде:
Решаем его, для чего выберем функцию вида: x = Aeiωt , где величина A может быть комплексной, то есть может иметь компоненты, которые находятся в фазе и в противофазе действующей силы F . Подставляем в уравнение: (−Amω2 + iαωA + A K)eiωt = F0eiωt и находим, что
A = |
|
F0 |
|
|
|
F0 |
F0 |
||||
|
= |
|
= |
|
|||||||
K + iαω − mω2 |
iαω + (K − mω2 ) |
iαω + m(ω02 −ω2 ) |
|||||||||
Отсюда решение имеет вид: |
|
|
|
|
|
||||||
x = |
F |
|
eiωt = |
− iF eiωt |
= |
− iF eiωt |
|||||
0 |
|
0 |
|
|
0 |
||||||
iα + m(ω02 −ω2 ) |
w[α − i(ωm − K / ω)] |
||||||||||
|
|
|
|
|
ωZ |
||||||
Где: Z =α −i(ωm − K /ω) . Далее преобразуя Z как Z eiϕ
15
СПБГУАП группа 4736 https://new.guap.ru
tgϕ = − |
ωm + K /ω |
тогда x = − |
iF ei(ωt −ϕ ) |
|
Z |
|
= α2 + (ωm − K / ω)2 Теперь можно легко видеть, |
|||
α |
0 |
Z |
|
ω |
при |
|
||||
|
|
|||||||||
|
|
|
|
|
|
|
|
|||
что:
1). Существует разность фаз между смещением x и силой F в следствие наличия реактивной части
импеданса Z , содержащего мнимый множитель i =  −1 .
−1 .
2). Существует дополнительная разность фаз, кроме ϕ , между силой F и смещением (множитель −i в
числителе амплитуды), которая равна −π / 2 , то есть смещение x отстает по фазе на 900 от силы, даже в случае
ϕ = 0.
3). Максимальная амплитуда смещения x = |
F0 |
. |
|||||
|
|||||||
ω |
Z |
|
|||||
|
|
|
|
|
|
||
Итак: x = |
F0 |
|
sin(ωt −ϕ) . |
|
|
|
|
|
|
|
|
|
|||
ω |
Z |
|
|
|
|||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
& |
|
: |
Скорость стационарного колебания x найдем, продифференцировав функцию смещения x |
|||||||||||||
|
−iF0 |
|
i(ωt −ϕ) |
|
F0 |
i(ωt −ϕ) |
|
|
|||||
& |
|
|
|
e |
|
= |
|
|
|
e |
|
замечаем, что: |
|
|
Z |
|
|
|
Z |
|
|
|
|||||
x = v = iω ω |
|
|
|
|
|
|
|||||||
1.Разность фаз между скоростью и силой равна только ϕ .
2.Амплитуда скорости равна F0 / Z , записывая в привычном виде, находим, что
v= FZ0 cos(ωt −ϕ) - скорость всегда опережает смещение по фазе на π / 2 .
Амплитуда скорости равна: |
|
|
|
|||||
|
F0 |
|
= |
F0 |
= |
F0 |
, то есть изменяется в зависимости от ω . На |
|
|
|
|
α2 + (ωm − K / ω)2 |
α2 +ω2m2 (1 −ω02 / ω2 )2 |
||||
|
|
Z |
||||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
низких частотах главный вклад имеет энергия, передавая осцилятору внешней силой.
Для поддержания стационарных колебаний системы, внешняя сила должна возместить энергию, рассеиваемую за каждый период из-за наличия сопротивления. В стационарном состоянии амплитуда и фаза маятника устанавливаются таким образом, чтобы средняя энергия, передаваемая внешней силой за единицу времени, точно равнялась средней энергии, теряемой маятником за этот же промежуток времени.
3.2. Мгновенная мощность Р, развиваемая осциллятором.
Мощность, передаваемая осциллятору, равна произведению мгновенной силы на мгновенную скорость:
P = F0 cosωt F0 cos(ωt −ϕ) = F02 cosωt cos(ωt −ϕ)
Z Z
Средняя мощность – есть сумма мгновенных мощностей за период деленная на этот период:
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∫Pdt |
T |
F 2 |
|
|
|
|
|
|
||
|
P |
= |
|
0 |
|
= ∫ |
|
0 |
cosωt cos(ωt −ϕ)dt /T = |
|
|
|
|
|||
|
|
T |
|
|
|
|
|
|
||||||||
|
|
Zm |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
||
|
|
|
|
F 2 |
T |
|
|
|
|
T |
F 2 |
|
|
|||
= |
|
|
0 |
∫cos2 ωt cosϕ dt + ∫cosωt sinωt sinϕ dt = |
0 |
|
cosϕ. |
|||||||||
|
|
|
|
|
||||||||||||
|
Z |
T |
2 |
Z |
||||||||||||
|
|
|
0 |
|
|
|
|
0 |
|
|
||||||
|
|
|
|
T |
|
|
|
|
1 |
T |
|
|
|
|
||
т.к. |
∫cos2 ωt dt = |
; а ∫cosωt sinωt dt = 0. |
|
|
|
|
||||||||||
|
|
|
|
0 |
|
|
|
|
2 |
0 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Энергия не накапливается в системе, а диссипируется за счет работы против силы трения FTP =αx& . Работа, совершаемая силой трения в единицу времени против FTP равна:
16
СПБГУАП группа 4736 https://new.guap.ru
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
F 2 |
2 |
(ωt −ϕ) . Опять усредним это выражение за период T и получим, |
||||||||||||||||||
|
|
& |
& |
|
|
|
& |
|
0 |
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
(αx)x =αx |
|
|
=α |
|
Z |
|
2 cos |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
F 2 |
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|||||
чтоP = |
|
|
|
|
cosϕ , здесь |
|
|
|
|
|
= cosϕ . |
||||||||||||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
Z |
|
|
|||||||||||||||||||||||||
2 |
Z |
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
3.3. Зависимость PCP |
от |
ω |
и резонансная кривая поглощения. |
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
F 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
P = |
|
|
cosϕ - проходит через |
max при ϕ = 0 и cosϕ =1. В этом случае ωm − K /ω = 0 , или |
|||||||||||||||||||||||||||||||
0 |
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||
2 |
Z |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
ω2m = K →ω2 |
=ω02 . Сила и скорость находятся в фазе, а импеданс Z принимает свое минимальное значение |
||||||||||||||||||||||||||||||||||
Z |
|
|
=α . Следовательно и |
|
= F 2 / 2α . Кривая зависимости |
|
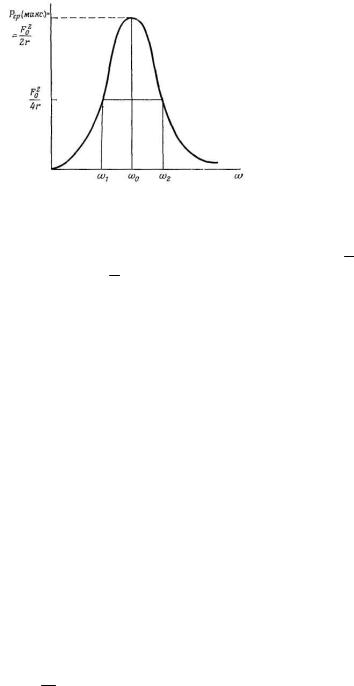
от ω представлена на рис.13. |
||||||||||||||||||||||||||||
min |
P |
P |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|||
Рис. 13.
Она характеризует реакцию осциллятора на действие внешней силы. Острота тех функций P определяется величиной коэффициента затухания α . Запишем P :
|
|
|
|
αF 2 |
|
|
1 |
|
|
|
|
|
|
1 |
F 2 |
|
|
|
|
|
|
|
|
= 2α2 |
, когда α2 + x |
|
2 |
|
|
2α2 или x |
2 |
|
|||||||||||||||
P = |
0 |
|
= |
|
P |
|
|
= |
|
|
|
0 |
|
, когда |
Z |
m |
= |
m |
= ωm − K /ω = ±α . |
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
2 |
Z |
|
|
|
2 |
|
|
max |
|
2 2α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
Если ω |
2 |
|
> ω , то имеем: ω1m − K /ω2 =α |
|
исключаем K . |
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
ω2m − K /ω1 = −α |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
K = (ω |
2 |
m −α)ω |
, ω m − ω2 |
(ω |
m −α) = −α , m(ω |
2 |
−ω ) = 2α . |
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
|
|
ω |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
2m −ω2m +αω |
2 |
+αω = 0 . m(ω |
2 −ω |
2 ) −α(ω |
2 |
+ω |
1 |
) = 0 . |
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
1 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|||||||||
(ω |
2 |
−ω |
1 |
)(ω |
2 |
+ ω |
1 |
) = |
α (ω |
2 |
|
+ ω ) |
. ω |
2 |
−ω =α / m . |
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Теперь вспомним, что добротность системы, колеблющейся под действием внешней силы, |
|||||||||||||||||||||||||||||||||||
записывается в виде |
Q = |
|
|
|
ω0 |
|
подставим полученное выражение и получим, что Q = mω0 . |
||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω |
−ω |
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Частоты ω =ω |
|
− |
α |
и ω |
|
|
=ω |
|
+ |
α |
|
Отмечены на графике. Они соответствуют величине |
||||||||||||||||||||||||||||||
|
|
|
|
|
0 |
|
|
2 |
|
0 |
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
2m |
|
|
|
|
|
|
|
|
|
2m |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
половинной максимальной мощности, отбираемой осциллятором. Разность частот в этом случае |
|||||||||||||||||||||||||||||||||||||||||||||||
ω2 −ω1 = |
|
ω называется “шириной частотной полосы поглощения”. |
|
|
|||||||||||||||||||||||||||||||||||||||||||
3.4. Сводка основных результатов.
1. Механический импеданс Z = Fv (сила на единицу скорости).
17
СПБГУАП группа 4736 https://new.guap.ru
Z =α + i(ωm − K /ω) |
|
Z |
|
= |
α2 + (ωm − K /ω)2 фазовый угол между скоростью и силой: |
||||
|
|
||||||||
sinϕ = |
ωm − K /ω |
;cosϕ = |
α |
;tgϕ = |
ωm − K /ω . |
||||
|
Z |
|
|
|
|
|
Z |
|
2 |
2.Стационарные значения смещений x = −i ωFZ0 ei (ωt −ϕ ) = ωFZ0 sin(ωt −ϕ) .
|
|
|
|
& |
|
F0 |
e |
i(ωt −ϕ) |
|
F0 |
|
cos(ωt −ϕ) . |
|
|
|
|
|
|||||||
скорости |
|
x = |
|
|
|
= |
|
|
|
|
|
|
|
|||||||||||
|
Z |
|
Z |
|
|
|
|
|
|
|||||||||||||||
3. |
Максимальная сорость v |
max |
= |
F0 |
при ω =ω |
0 |
- частота резонанса. |
|||||||||||||||||
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|||
|
Максимальное смещение x |
|
|
= |
|
F |
, где ω |
|
= |
K |
− |
α2 |
|
|||||||||||
4. |
max |
|
0 |
|
|
|
частота резонанса смещения |
|||||||||||||||||
ω α |
|
m |
4m2 |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
ω |
= ω |
|
2 |
− |
α2 |
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
4m2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
1 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
5.Энергия поглощается в единицу времени:
P= F02 cosϕ. ( cosϕ - коэффициент мощности)
2Z
P |
|
F 2 |
|
|
K / m . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
= |
0 |
на частоте ω |
0 |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
max |
|
2α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
F |
2 |
и состветствует частотам ω =ω |
|
− |
α |
и ω |
|
=ω |
|
+ |
α |
|
|
Половина поглащаемой энергии равна |
0 |
|
0 |
|
2 |
0 |
|
. |
||||||||||||||||
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
4α |
1 |
|
2m |
|
|
|
2m |
|
|||||
|
Добротность Q = ω0m |
|
|
|
ω0 |
|
|
|
|
|
|
|
|
|
||||||||||
6. |
= |
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|||||||
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
α |
|
2 |
−ω |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Глава II. Система маятников, связанных между собой, и волновое движение
В предыдущих параграфах мы рассмотрели вопрос: как ведет себя колеблющаяся система, взятая отдельно, независимо от других. Реально же, осцилляторы крайне редко, как правило, это искусственно созданные условия, находятся в полной изоляции. В общем случае отдельные осцилляторы связаны между собой общим элементом. Иногда явно, как например пружина и т.д. Связь через массу или неидеальную упругость неизбежно приводит к потере энергии и быстрому затуханию колебаний.
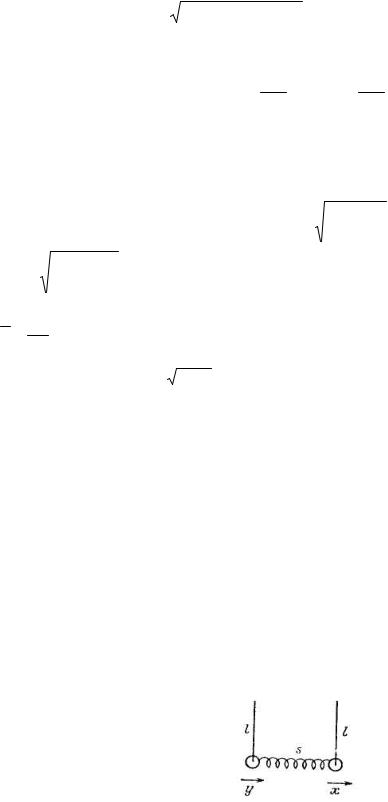
Рассмотрим пример механической связи двух маятников через жесткость.
2.1.Осцилляторы связанные через жесткость.
Рис. 14
На рис.14 изображены два отдельных маятника совершенно одинаковой массой m , подвешенные на легком жестком и невесомом стержне длины l . Они соединены пружиной с коэффициентом жесткости K . Обозначим смещение элементов системы через x и y , и найдем уравнение для каждого из них:
18