Материал: НЕФТЯНОЙ ГЕОЛОГИИ
СПБГУАП группа 4736 https://new.guap.ru
7.Прямоугольный волновой пакет, состоящий из n компонент с амплитудой a каждого, имеющий частную
|
ω , описывается выражением: R(t, x) = a |
sin( |
ωt / 2) |
cos( |
|
|
|
|
|
|
|
|
||||
ширину |
ω |
t − k |
x) , где |
ω |
- средняя |
|||||||||||
sin( |
ωt / 2n) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
частота = |
|
∑ωi |
. Амплитуда обращается в 0 , когда sin( |
ωt / 2) = 0 или |
ωt |
= π , ωt = 2π . |
||||||||||
|
i=1 |
|||||||||||||||
|
n |
2 |
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
8. Теорема о ширине частотной полосы: для определения волнового импульса длительностью t необходима частотная ширина ω = 2π / t и наоборот.
9.Импеданс или волновое сопротивление среды: Z = сила/скорость = −T ∂∂yx / ∂∂yt = ρc . Отсюда выражение для силы: F = ρcv .
|
|
|
|
|
|
|
|
Z1 |
− Z2 |
|
|
|
2Z1 |
|
||
10. |
Коэффициенты отражения и пропускания: r = |
, τ |
= |
. Энергия отраженной волны: |
||||||||||||
Z1 |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
+ Z2 |
|
|
Z1 + Z2 |
|||||
|
|
Z1 |
− Z2 |
|
2 |
|
|
|
|
4Z1Z2 |
|
|
|
|
||
|
− |
|
. Энергия прошедшей волны: − |
|
|
|
. |
|
|
|||||||
|
|
|
|
|
|
2 |
|
|
||||||||
|
|
Z1 |
+ Z2 |
|
|
|
|
|
(Z1 + Z2 ) |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||||
11. |
Согласование импедансов Z2 = Z1Z3 . |
|
|
|
|
|
|
|
|
|||||||
Толщина среды с импедансом Z2 равна λ / 4 , где λ - длина волны в этой среде.
2.8.Поляризация.
Амплитуда некоторых типов волн (электромагнитных, упругих в твердых телах ) в средах
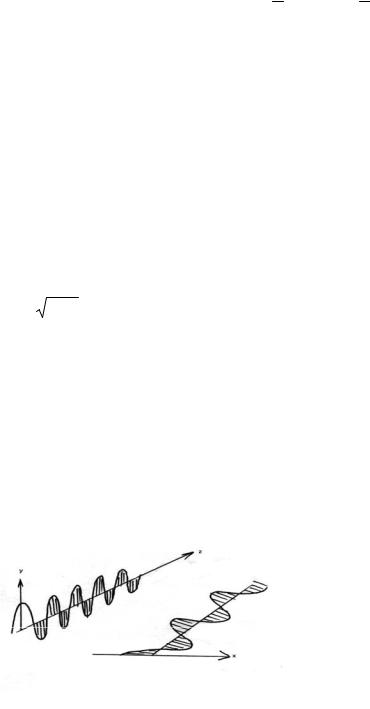
характеризуются не только величиной отклонения от положения равновесия, но и направлением. Особо наглядно эта зависимость проявляется на струне. В предыдущих исследованиях колебаний и волн мы не придавали этому факту какого-либо значения, и правильно. Но сейчас, когда установлены основные закономерности волнового движения, обратим внимание на то, что натянутая струна обеспечит бесконечное множество направлений отклонений от невозмущенного состояния. Выберем наугад три реперных направления. Одно вдоль струны “ z ”, другие два ему перпендикулярных, например, “вверх - вниз”, обозначив его через “ y ” и “влево - вправо”, обозначив его как “ x ”. Тогда любое отклонение струны из начального
положения мы можем получить путем линейных комбинации этих двух ортогональных направлений, считая их за оси локальной системы координат “привязанной” к струне. Это показана на рисунке (вертикально поляризованная волна и горизонтально поляризованная волна). Рис. 28.
Рис. 28.
Малые колебания струны фактически всегда линейны, так что две волны могут распространяться вдоль струны независимо друг от друга. В данном случае скорость их распространения одинакова, так как
определяется силой натяжения T0 и линейной плотностью.
Во многих средах волны распространяются одинаково не зависимо от их поляризации. Но это относится не ко всем веществам и уж тем более к геологическим породам. Яркой житейской иллюстрацией этого явления служит распространение волн в деревянных рельсах. Доска, как известно, имеет два выделенных ортогональных направления. Одно из них перпендикулярно горизонтальной плоскости, другое – вертикальной. При этом сама доска обладает существенно меньшей жесткостью для колебания “вверх – вниз”, и наоборот для “влево – вправо”. Мы все помним свои ребячьи игры, иногда заканчивающиеся синяками и ссадинами, при неумелом использовании досок в качестве качелей, при закреплении одного из ее концов.
Итак, волны представляют собой физические процессы, характеристические параметры которых, суть отклонения от их равновесного состояния, меняются в зависимости от координат и времени. Отклонение от
39

СПБГУАП группа 4736 https://new.guap.ru
положения равновесия может описываться вектором смещения U(x, y, z, t) . Будем рассматривать плоские волны, для которых функция смещения зависит от z, t т.е. U(z, t) .
В общем случае, как мы уже знаем, вектор смещения в плоской волне, распространяющейся вдоль направления zˆ описывается уравнением: U(z, t) = mvxU x (z, t) + mvyU y (z, t) + mvzUz (z, t) .
Для поперечных упругих волн вектор U(z, t) имеет либо x, y компоненту, либо z, x соответственно
нашим обозначениям sH и sV типов сдвиговых колебаний.
Если в поперечной волне смещение направлено вдоль прямой линии и лежащей в плоскости XY ,
перпендикулярно оси zˆ , то такая волна называется линейно поляризованной sH .
U(z, t) = m)xUx (z, t) + m)yU y (z, t) или, представляя, что m)xUx (z, t) = m)x A1 cosωt и
U y (z, t) = m)y A2 cosωt
запишем, что: U(z, t) = m)x A1 cosωt + m)y A2 cosωt = (m)x A1 + m)y A1 ) cosωt.
Для простоты мы возьмем колебания с одинаковой фазой в разных точках оси z . Величина и направление
|
|
) |
|
|
|
) |
A2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
вектора mx A1 |
+my |
|
в этом случае не зависит от времени и наше уравнение дает описание колебания вдоль |
||||||||||||||||||||||||||||||||||||||||||||||||
фиксированного направления с амплитудой A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
A = |
A12 |
+ A22 |
, которое переносится вдоль оси OZ . Вектор U(z, t) одну половину периода направлен |
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
A |
|
mˆ x + |
A |
|
mˆ y |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
вдоль единичного вектора − m , где + m , где |
m |
= |
|
1 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
) |
|
|
) |
|
|
|
|||||||||||||||||||||||||||||
Найдем этот вектор: |
|
|
|
|
|
|
|
|
|
|
|
|
) |
= |
|
|
) |
|
|
|
|
|
) |
|
U = |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
U = mAcosωt m |
B1mx |
|
+ B2my |
|
(B1mx + B2my ) cosωt |
|||||||||||||||||||||||||||||||||||||||||||||
A(B m |
x |
+ B m |
y |
) = A m |
x |
+ A m |
y |
и B m |
x |
+ B |
m |
y |
= |
A1 |
m |
x |
+ |
A2 |
m |
y |
; B |
= |
A1 |
; B |
2 |
= |
A2 |
. |
|||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
1 |
2 |
|
|
|
|
|
1 |
|
|
2 |
|
|
1 |
|
|
2 |
|
|
|
|
A |
|
|
|
A |
|
1 |
|
A |
|
A |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
v v |
|
( A mˆ |
x |
|
+ A mˆ |
y |
)2 |
|
|
|
A2mˆ |
x |
mˆ |
x |
+ A2mˆ |
y |
mˆ |
y |
+ 2A A mˆ |
x |
mˆ |
y |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
1 |
|
|
|
|
|
2 |
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
1 2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
(m |
m) = |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=1. |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
A2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Для линейно поляризованной бегущей волны необходимо вместо аргумента ωt подставить ωt − kz и |
|||||||||||||||||||||||||||||||||||||||||||||||||||
тогда Ur(z, t) = ( A mˆ |
x |
+ A mˆ |
y |
) cos(ωt − kz) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
1 |
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Круговая поляризация.
Однако, поперечная волна может нести не только колебания вдоль какой-либо линии. Эти колебания могут представлять собой движение частицы по кругу, при этом говорят, что волна поляризована по кругу.
Такие колебания могут быть представлены суперпозицией линейно - поляризованных колебаний по осям x и y , причем амплитуды этих движений равны. Выберем правостороннюю систему координат x × y = z . В
этом случае для колебания с круговой поляризацией по + z составляющая uvx опережает на 900 uvy :
u(t) = m)x A1 cosωt + m)y A2 cos(ωt −π / 2) = m)x A1 cosωt + m)y A2 sinωt .
Аналогично, при вращении U(z, t) в обратную сторону Ux отстает от U y на 900 и
) |
) |
A = A . |
U (z,t) = m A cosωt −m A sinωt; |
||
x 1 |
y 2 |
1 2 |
Поляризованные по кругу упругие волны переносят момент импульса единицы объема J , который, как
известно, выражается через энергию волны и ее угловую частоту:
J = ±m)z (w / ω) = ±m)z (ρv2 / ω) = ±m)z (ρλv) , где ρ - плотность породы, λ - длина волны, v - массовая скорость движения частицы.
Бегущая волна с круговой поляризацией по направлению + z получится заменой аргументов ωt на
ωt − kz или:
US (z, t) = A{m)x cos(ωt − kz) + m)y cos[(ωt −π / 2) − kz]}.
Если волна идет в обратном направлении, то меняется значение аргумента ωt − kz на обратные.
Общий случай поперечной поляризации – эллиптическая поляризация.
В общем случае это колебание имеет вид:
40
СПБГУАП группа 4736 https://new.guap.ru
U(t) = m)x A1 cos(ωt +ϕ1 ) + m)y A2 cos(ωt +ϕ2 ) . Если ϕ1 = ϕ2 или ϕ2 ±π то мы имеем случай линейно поляризованного колебания.
Если ϕ2 = ϕ1 −π / 2 и A1 = A2 , то имеет место колебание с круговой поляризацией по + mz , при
ϕ2 = ϕ1 +π / 2 ; A1 = A2 то же, но по − mz . Запишем, как это мы делали раньше, что:
|
|
|
) |
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
U x |
= |
|
|
A1 cos(ωt +ϕ1 ) |
|
|
||||||||||||||||||||
U(t) = mxU x |
+ myU y , тогда |
|
U |
|
|
= |
|
|
A cos(ωt + |
ϕ |
|
) |
из этих двух уравнений исключим посредством |
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
2 |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
||||||
алгебраических преобразований функции cos и sin ωt . |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
a |
x |
=U |
x |
/ A |
= cosωt cosϕ |
1 |
− sinωt cosϕ |
1 |
|
|
|
cosϕ |
2 |
|
|
||||||||||||||||||||||||||||||
a |
=U |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
|||||||||
y |
y |
/ A |
|
= cosωt cosϕ |
2 |
|
− sin ωt cosϕ |
2 |
|
|
cosϕ |
1 |
|
||||||||||||||||||||||||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
ax cosϕ2 − ay cosϕ1 |
= sinωt sinϕ2 cosϕ1 − sinωt sinϕ1 cosϕ2 = |
||||||||||||||||||||||||||||||||||||||||||||
= sinωt(sinϕ2 cosϕ1 |
|
− sinϕ1 cosϕ2 ) = sinωt sin(ϕ2 |
−ϕ1 ) |
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
ax cosϕ2 − ay cosϕ2 |
|
|
|
|
|
|
U |
x |
cosϕ2 − |
U y |
cosϕ1 |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A |
|
||||||||||||||||||||||||||||||
sinωt = |
|
|
= |
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
sin(ϕ2 |
−ϕ1 ) |
|
|
|
|
|
|
|
|
|
sin(ϕ2 |
−ϕ1 ) |
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
U y |
sinϕ2 |
− |
U |
x |
sinϕ1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
A1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
cosωt = |
|
|
|
|
|
|
A2 |
|
|
|
|
|
|
|
|
. Возведем в квадрат и сложим, тогда справа 1, а слева получим |
|||||||||||||||||||||||||||||
|
|
|
|
sin(ϕ2 −ϕ1 ) |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
U |
x |
|
|
2 U y |
2 |
|
|
|
U |
x |
U y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
выражение: |
|
|
|
|
|
+ |
|
|
|
|
|
− 2 |
|
|
|
|
|
|
|
|
|
cos(ϕ |
|
|
−ϕ |
) =1. Это не что иное, как уравнение кривой второго |
|||||||||||||||||||
|
A |
|
|
|
|
|
A |
|
|
A |
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
1 |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
порядка носящее название конического сечения или эллипса. В зависимости от конкретного соотношения фаз двух колебаний ϕ1 и ϕ2 главные оси эллипса постепенно поворачиваются относительно осей координат x и
y . При ϕ2 −ϕ1 = 0;π;2π. - поляризация линейная с переменной смещения частицы при ϕ2 −ϕ1 = π . При ϕ2 −ϕ1 = π / 2;3π / 2. - эллипс вытянут вдоль осей y , либо x и в зависимости от соотношения между величинами A1 и A2 .При A1 = A2 - круговая поляризация, т.к. в этом случае U x2 +Ux2 = A2 .
При остальных значениях ϕ - эллипс занимает промежуточное положение.
Вставить фиг.11 со стр.28.
Свойства поперечно поляризованных колебаний.
1. В линейно – поляризованной волне при фиксированной пространственной координате смещение или
отклонение дважды проходит через 0 , а все элементы совершают одинаковое движение, но с фазовым сдвигом, определяемым временем распространения волны.
2. При круговой поляризации стоячей или бегущей волны + абсолютная величина отклонения при
фиксированной координате z постоянна. Если сделать мгновенный снимок волны, то форма возмущенного состояния среды будет напоминать форму штопора.
3. При отражении направление вращения относительно фиксированного в пространстве направления
zсохраняется независимо от свойств отражающей границы.
2.8.Различные представления состояния поляризации.
Наиболее общее состояние поляризации может быть представлено суперпозицией волн линейно
поляризованных по осям x и y . Существует множество направлений, которые можно выбрать за x и, соответственно этому, множество представлений состояния с линейной поляризацией, переходя к комплексным величинам, ибо мы знаем, что любую волну можно представить в виде ряда гармонических функций, записанных через комплексные величины, можно сказать, что существует бесконечное множество
наборов ортонормированных волновых функций U1 и U2 , которые можно использовать для получения
суперпозиции, определяющей U(z, t) .
Полный набор ортонормированных волновых функций для линейно – поляризованных колебаний по
v |
и |
v |
) |
i(kz−ωt) |
) |
i(kz−ωt) |
. |
направлениям mx |
my |
U1 = mx e |
|
и U2 = my e |
|
41
СПБГУАП группа 4736 https://new.guap.ru
Они удовлетворяют условиям: U1 U1* =1;U1* U2 = 0 , что легко проверить подстановкой.
Произвольно поляризованное колебание может быть представлено в виде суперпозиции поляризованных компонент с левой и правой спиральностью, с соответствующе подобранными амплитудами и фазами. К
примеру, возьмем волну линейно поляризованную по оси x , которая может быть представлена двумя эквивалентными выражениями:
U = m)x Acos(kz −ωt) или
v |
|
A |
) |
) |
A |
) |
) |
|
U |
= |
|
{mx cos(ωt − kz) + my cos(ωt − kz −π / 2)}+ |
|
{mx cos(ωt − kz) + my cos(ωt − kz +π / 2)} |
|||
2 |
2 |
|||||||
|
|
|
|
|
. Здесь |
|||
при m)y множитель A / 2 - одинаков, а cos отличаются друг от друга фазой на π и при сложении дадут 0 . Соответствующие комплексные выражения имеют вид:
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U = mx Aei(kz−ωt ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
v |
|
A |
) |
|
(kz−ωt ) |
|
) |
i[kz−(ωt−π / 2)] |
|
A |
) |
|
(kz−ωt) |
|
) |
i[kz−(ωt+π / 2)] |
|
|
|
|||||||||||
U = |
|
|
|
|
{mx e |
|
+ my e |
|
|
|
|
|
|
|
}+ |
|
{mx e |
|
|
|
+ my e |
|
|
} |
|
|
||||
2 |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
||||||||||||||
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. Ему можно придать более компактный |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
π = i; |
π |
|
−i sin π |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ei 2 = cos π |
+ i sin |
e−i 2 = cos π |
= −i |
|||||||||||
вид, если использовать выражения: |
|
|
|
|
2 |
|
|
|
|
2 |
|
|
2 |
2 |
, тогда после |
|||||||||||||||
преобразований получим, что: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
v |
A |
|
|
) |
|
) |
|
i(kz−ωt ) |
|
|
A |
|
) |
|
) |
i(kz−ωt ) |
|
|
|
|
|
|
|
|||||||
U = |
|
|
|
[(mx |
+ imy )e |
|
|
] + |
|
|
[(mx − imy )e |
|
|
|
] |
|
|
|
|
|
||||||||||
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|||
Теперь вновь можно указать полный набор ортонормированных функций, описывающих состояния кривой |
||||||||||||||||||||||||||||||
поляризации: |
|
) |
|
|
|
|
|
|
|
|
|
) |
|
) |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Uv(+) = |
(mx + imy ) |
ei(kz−ωt ) ; Uv(−) |
= |
(mx − imy ) |
ei(kz−ωt ) . |
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
Ортонормированность функций U (+) и U (−) доказывается аналогично: |
|
|
|
|||||||||||||||||||||||||||
U (+) U (+)* =U (+)* U (+) =1; |
|
|
U (+)* U (−) = 0 =U (−)* |
U (+) . |
Поэтому, в общем случае состояние |
|||||||||||||||||||||||||
поляризации в гармонической бегущей волне можно представить в следующем виде:
U(z, t) =A(+) U (+) +A(−) U (−) , где: A(±) - комплексные постоянные. Для случая линейной поляризации
A(+) =A(−) = A /  2.
2.
Из достаточно общих соображений мы получим, что состояние поляризации волны описывается уравнением второго порядка вида:
U |
x |
2 |
U y |
2 |
2U xU y |
|
|
|
) = sin2 ( ϕ) + cos2 ( ϕ). |
|||
|
|
|
+ |
|
|
− |
|
cos(ϕ |
|
−ϕ |
||
A |
A |
A A |
|
|||||||||
|
|
|
|
|
|
2 |
1 |
|
||||
|
|
1 |
|
|
2 |
|
|
1 2 |
|
|
|
|
При этом возможны три случая: |
|
|
|
|
|
|
|
|
||||||
1) |
ϕ2 |
−ϕ1 |
= ±π / 2; A2 ≠ A1 |
получаем эллиптическую поляризацию с осями эллипса совпадающими с |
||||||||||
координатами x и y . |
|
|
|
|
|
|
|
|
|
|||||
2) |
ϕ2 |
−ϕ1 |
= ±π / 2 +πn; A2 |
= A1 - круговая поляризация. |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
U |
x |
2 |
U y |
2 |
||||
3) |
ϕ |
|
−ϕ |
|
= πN; N = 0,1,2,3,... - линейная поляризация т.к. |
|
|
± |
|
|
|
= 0 получаем уравнение двух |
||
|
|
a |
|
|
|
|||||||||
|
|
2 |
|
1 |
|
|
|
|
a |
|
|
|
||
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|||
прямых, углы наклона которых к оси ox определяются соотношениями между A1 и A2 : tgα = ±A2 / A1 . Состояние поляризации гармонической волны обычно характеризуют множители поляризации.
Ρ = |
U x |
= |
A1 |
ei(ϕ2 −ϕ1 ) |
|
|
A |
||||
U |
y |
|
|
||
|
|
|
2 |
|
|
Как следует из предыдущего при комплексном Ρ волна имеет эллиптическую поляризацию, при чисто мнимом – оси эллипса совпадают с осями координат. Когда Ρ = ±i - поляризация круговая. В случае
42

СПБГУАП группа 4736 https://new.guap.ru
действительных значений Ρ волна поляризована линейно. Знак мнимой части Ρ определяет направление вращения вектора смещения вектора смещений в плоскости поляризации.
Основной вывод из всех рассмотренных нами соображений тот, что если отношение амплитуд
ортогональных проекций вектора смещения U и сдвиг фаз между ними не изменяются, то есть если U x и
Uv y когерентны, то упругая волна поляризована.
Состояние поляризации как монохроматических так и не монохроматических волн можно характеризовать единым образом с помощью матрицы когерентности:
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
U U * |
U U * |
|
||||||||||||||||
Ι |
|
= |
|
|
x |
|
|
x |
|
|
|
|
x |
|
|
y |
|
, где черта означает усреднение по времени наблюдения, которое должно быть |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
αβ |
|
U U * |
|
|
U U * |
|
||||||||||||||
|
|
|
|
|
y |
|
|
x |
|
|
|
|
y |
|
|
|
y |
|
|||
значительно больше, чем период T = 2π / ω . Как видим, след матрицы Ι равен интенсивности рассматриваемой |
|||||||||||||||||||||
волны: S p Ιαβ |
= |
|
|
|
2 |
|
|
+ |
|
|
|
2 |
= Ι. |
||||||||
U x |
|
|
|
U y |
|
||||||||||||||||
В случае полностью поляризованной волны U xU *y =U xU *y поскольку ни U x ни U y и соответственно их произведение от времени не зависят.
Для неполяризованной волны определитель матрицы когерентности Ιαβ = Ι2 / 4 , поскольку в этом
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
||
|
U U * |
|
U *U |
|
|
|
|
|
||||||||
|
= |
= 0 , а |
|
|
|
= |
|
|
= Ι / 2 . |
|||||||
случае произведения |
U |
x |
U |
y |
||||||||||||
|
x y x y |
|
|
|
|
|
|
|
|
|
||||||
Для полностью поляризованной волны определитель матрицы когерентности равен 0 , а в случае
частичной поляризации для определителя выполнено неравенство:
Подставляя в матрицу когерентности выражения для U x и
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A2 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
A A exp i(ϕ |
2 |
−ϕ |
) |
|||||
Ι |
|
= |
|
1 |
|
|
|
|
1 2 |
|
|
1 |
|
|
||
|
αβ |
|
A A exp[−i(ϕ |
2 |
−ϕ |
)] |
|
A2 |
|
|
|
|
|
|||
|
|
|
1 |
2 |
|
|
1 |
|
2 |
|
|
|
|
|
||
0 ≤ Ιαβ ≤ Ι2 / 4 .
U y ей можно придать следующий вид:
Таким образом, состояние поляризации полностью характеризуется заданием следующих величин:
|
|
|
|
|
|
|
|
|
|
|
|
A2 |
; |
A A exp i ; |
A A exp(−i ) ; |
A2 |
, где A2 |
+ A2 |
= Ι . |
||||
1 |
|
1 |
2 |
|
1 |
2 |
|
2 |
1 |
2 |
|
Вместо этих четырех величин удобно ввозить следующее 3:
|
|
|
1 |
|
− |
|
);ξ |
|
|
1 |
|
|
|
|
1 |
|
|
|
ξ |
|
= |
( |
A2 |
A2 |
|
= |
|
;ξ |
|
= |
|
, которые носят названия параметров Стокса. |
|||||
|
|
2A A cos |
|
2A A sin |
||||||||||||||
|
1 |
|
Ι |
1 |
2 |
|
2 |
|
Ι |
1 2 |
|
3 |
|
Ι |
1 2 |
|
||
В этом случае матрица когерентности выражается через параметры Стокса следующим образом:
|
|
Ι |
|
1 +ξ |
1 |
ξ |
2 |
+ iξ |
3 |
|
|
|
|
Ιαβ |
= |
|
|
|
|
|
|
причем: для неполяризованной волны ξ1 |
= ξ2 |
= ξ3 = 0 , а для полностью |
|||
2 |
|
|
1 −ξ1 |
|
|||||||||
|
|
ξ2 − iξ3 |
|
|
|
|
|
||||||
поляризованной ξ12 |
= ξ22 = ξ32 |
=1. Сумма квадратов параметров Стокса характеризует степень поляризации |
|||||||||||
волны: p2 |
= ξ12 |
+ξ22 +ξ32 . |
|
|
|
|
|
|
|
|
|||
Если интенсивность волны равна Ι, то интенсивность ее поляризованной части есть ΙΠ = pΙ, а
неполяризованной ΙΗΠ = (1 − p)Ι.
Физический смысл параметров Стокса ясен из их определения: Ιξ1 - разность интенсивности линейно –
поляризованных волн при α = 0 и 900 . Ιξ 2 - то же самое, но для α = 45 и 1350 . Ιξ 3 - разность интенсивностей
волн с правой и левой круговой поляризацией.
С помощью этих параметров или матрицы когерентности можно находить поляризацию суммарного поля при суперпозиции нескольких волн. Матрица когерентности результирующей волны равна сумме матриц когерентности отдельных волн.
Можно решить задачу о разложении частично поляризованного излучения на полностью поляризованную и неполяризованную компоненты и определить характер поляризации. Для этого матрицу когерентности необходимо записать в виде:
Ι |
|
= |
1 |
Ι(1 |
− ρ)δ |
|
+ |
1 |
Ι |
|
|
1 |
+ξ1 / ρ |
(ξ2 + iξ3 ) / ρ |
, где ρ = |
ξ |
2 |
+ξ |
2 |
+ξ |
2 |
, а δ |
|
- |
|
|
2 |
|
2 |
|
|
|
− iξ3 ) / ρ |
1 −ξ1 / ρ |
|
|
|
|
|
||||||||||||
|
αβ |
|
|
|
αβ |
|
|
ρ |
(ξ2 |
|
|
|
1 |
|
2 |
|
3 |
|
αβ |
|
|||||
единичный тензор или символ Кронекера. С помощью параметров Стокса можно рассчитать форму и ориентацию
43