Материал: Механика материалов. Методы и средства экспериментальных исследований
σи = |
1 |
|
(σ11 − σ22 )2 + (σ22 − σ33 )2 + (σ33 − σ11)2 + 6(τ122 + τ232 + τ132 ) = |
|
||
|
|
|
|
|||
2 |
|
(1.8) |
||||
|
1 |
|
|
|
|
|
= |
|
|
(σ1 − σ2 )2 + (σ2 − σ3 )2 + (σ3 − σ1)2 . |
|
||
|
|
|
|
|||
2
Максимальные касательные напряжения действуют на площадках, повернутых на угол π 2 по отношению к главным, и определяются следующим образом:
2 по отношению к главным, и определяются следующим образом:
τ12max = |
|
σ1 − σ2 |
|
|
, τ23max = |
|
|
σ2 − σ3 |
|
|
, τ13max = |
|
|
σ1 − σ3 |
|
|
. |
(1.9) |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
2 |
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|||||
Если принять обозначения, при которых |
σ1 ≥ σ2≥ |
σ3 , то |
|||||||||||||||||
максимальные значения нормального и касательного напряжений будут равны соответственно:
σmax = σ1 |
и τmax = |
1 |
(σ1 − σ3 ) . |
(1.10) |
|
||||
|
2 |
|
|
|
При рассмотрении напряженного состояния в точке часто выделяют шаровую и девиаторную части. Шаровая часть (характеризуется значением среднего напряжения σ) выделяет из напряженного состояния равномерное всестороннее растяжение или сжатие, при котором изменяется объем данного элемента тела без изменения формы.
Девиатор напряжений
sij = σij − σδij ( i , j =1, 2, 3 ), |
(1.11) |
где символы Кронекера δij определяются по следующему правилу:
|
1, при i = j, |
|
δij = |
0, при i ≠ j |
(1.12) |
и характеризует состояние сдвига, при котором изменяется форма элемента без изменения его объема. Следовательно, девиатор
11
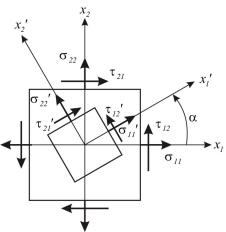
Рис. 1.3. Преобразование компонент напряжений при повороте системы координат (плоское напряженное состояние)
напряжений указывает отклонение рассматриваемого напряженного состояния от всестороннего растяжения (сжатия) или отклонение приобретенной формы от первоначальной. Как показывают опыты, материалы по-разному реагируют на всестороннее сжатиеи сдвиг [5].
Представляет интерес рассмотрение частного случая – плоского напряженного состояния (ПНС), реализуемого в тонких пластинах и оболочках. В этом случае напряженное состояние харак-
теризуется тремя значениями σ11 , σ22 и τ12 , а формулы пересчета компонент напряжений при повороте системы координат (рис. 1.3) имеют вид:
σ11′ |
= σ11 cos2 α+ σ22 sin2 α+ τ12 sin 2α, |
|
||
σ′22 |
= σ11 sin2 α+ σ22 cos2 α− τ12 sin 2α, |
(1.13) |
||
τ12′ = − |
σ11 − σ22 |
sin 2α+ τ12 cos 2α. |
(1.14) |
|
|
||||
|
2 |
|
|
|
Из последней формулы следует, что главные напряжения будут действовать на площадках, полученных при повороте системы координат на угол α0 , для которого справедливо выражение
tg 2α0 = |
2τ12 |
. |
(1.15) |
|
|||
|
σ11 − σ22 |
|
|
12
В этом случае главные напряжения могут быть найдены по формуле
σ1,2 |
= |
σ11 + σ22 |
± |
1 |
(σ11 − σ22 )2 + 4τ122 , |
(1.16) |
|
|
|||||
|
2 |
2 |
|
|
||
здесь знак «+» соответствует напряжению σ1 , а знак «–» – напряжению σ2 .
Максимальное касательное напряжение при плоском напряженном состоянии определяется соотношением
τ12max = |
1 |
(σ11 − σ22 )2 + 4τ122 . |
(1.17) |
|
|||
2 |
|
|
|
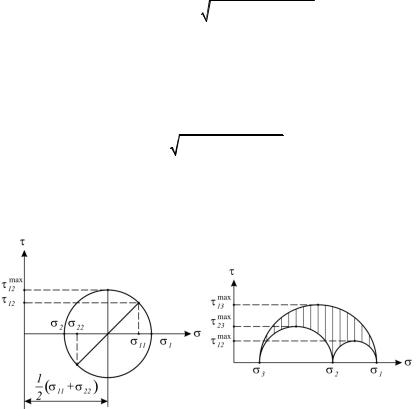
Наиболее наглядно зависимости напряжений от ориентации площадок иллюстрируются с помощью круговых диаграмм О. Мора (рис. 1.4, 1.5).
Рис. 1.4. Круговая диаграмма |
Рис. 1.5. Круг Мора в случае |
О. Мора для анализа плоского |
объемного напряженного |
напряженного состояния |
состояния |
При осевом растяжении или сжатии стержня постоянного по длине поперечного сечения в нем реализуется одноосное напряженное состояние. Нормальное напряжение на площадке, перпендикулярной оси нагружения x1 , определяется как отно-
13

Рис. 1.6. Напряжения на наклонной площадке при одноосном напряженном состоянии
шение продольного усилия N к площади поперечного сечения F и являетсяглавным:
σ1 = σ11 = N , σ2 = σ3 = 0 . (1.18)
F
На наклонных площадках (α – угол наклона, рис. 1.6) кроме нормальных действуют и касательные напряжения, достигающие максимального значения при угле
α = π 4 :
4 :
σ11′ = σ11 cos2 α , τ12′ = |
σ11 |
sin 2α, |
τ12max = |
σ11 |
. |
(1.19) |
|
|
|||||
2 |
|
2 |
|
|
||
Этим объясняется тот факт, что при испытаниях на одноосное нагружение образцов из различных материалов происходит разрушение от отрыва по плоскости поперечного сечения и от сдвига по наклонным сечениям.
С целью анализа деформированного состояния [6] рассмотрим деформацию элементарного объема в виде куба с ребрами длиной l0 и направим оси x1 , x2 и x3 вдоль ребер. При его деформации изменяются длины ребер и углы между ними. Конструкционные материалы допускают обычно небольшие деформации до разрушения. Поэтому мы ограничимся изучением таких деформаций куба, при которых изменения длин его ребер (удлинения) малы по сравнению с начальной длиной ребер, а изменения углов между ребрами (сдвиги) малы в сравнении с начальными прямыми углами между ними. Такую деформацию куба можно представить как сумму (суперпозицию) шести элементарных деформаций, показанных на рис. 1.7.
В первых трех случаях углы остаются прямыми, а изменяются только длины ребер соответственно на малые величины
14
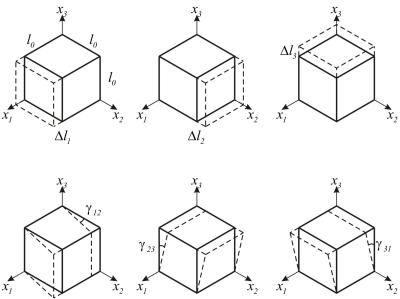
Рис. 1.7. Простые виды деформаций элементарного объема
∆ l1 , ∆ l2 и ∆ l3 . Деформации такого рода связаны с удлинениями и считаются положительными, если длина ребер увеличивается. В остальных трех деформациях длины ребер остаются неизменными, а меняются углы между ребрами в плоскостях x1 x2 , x2 x3 и x3 x1 соответственно на величины γ12 , γ23 и γ31 . Такие дефор-
мации называют сдвиговыми, и их считают положительными, если прямой угол при деформации уменьшается.
Сдвиги γ12 , γ23 и γ31 , будучи угловыми величинами, являются безразмерными, и при одинаковой сдвиговой деформации элементов различной величины они равны. Удлинения ∆ l1 , ∆ l2 и ∆ l3 таким свойством не обладают, поэтому линейные деформации вводятся как относительные удлинения в соответствующем направлении:
15