Материал: m012800p

5.2.1.4 End of Frame Time
O End of Frame Time é o tempo de repouso após um frame, que é necessário para comutar o repetidor no slave. Este tempo tem de ser dimensionado de forma a que as lacunas de um frame não conduzam a uma detecção incorreta do End of Frame Time. O ajuste do End of Frame Time é efetuado por meio da entrada ENDOFFRAMETIME.
End of Frame Time |
ENDOFFRAMETIME |
|
Valor |
3 x Frame Time |
0 |
|
|
100 ms |
1 |
|
|
200 ms |
2 |
|
|
500 ms |
3 |
|
|
1 s |
4 |
|
|
1 ms |
5 |
|
|
10 ms |
6 |
|
|
50 ms |
7 |
|
|
Tabela 5.15: End of Frame Time, controlador
O ajuste standard é 3 x Frame Time.
5.2.1.5 Modo ASCII/RTU
Existem dois modos de transmissão diferentes no MODBUS:
Modo ASCII: |
Cada byte (8 bit) é enviado sob a forma de 2 caracteres ASCII. |
Vantagem: |
São transmitidos os caracteres que podem ser representados. As |
|
lacunas entre os caracteres não têm de ser tomadas em conta, desde |
|
que não excedam um segundo. |
Modo RTU: |
Cada byte(8 bits) é composto por dois caracteres hexadecimais de 4 |
|
bits. |
Vantagem: |
Visto que para cada byte apenas é transmitido 1 caractere, é |
|
alcançada uma maior passagem de dados do que no modo ASCII. |
O ajuste é efetuado por meio da entrada ASCIIRTUMODE.
Modos |
ASCIIRTUMODE |
|
Valor |
|
|
ASCII |
FALSE |
|
|
RTU |
TRUE |
|
|
Tabela 5.16: Modo ASCII-/RTU, controlador
O ajuste standard é o modo RTU.
38 |
MODBUS / Configuração |
|
01-03-16 |
|

5.2.1.6 Error Check
A partir do frame a transmitir no emissor (comando superior) é calculada uma soma de verificação (CRC). Esta soma é transmitida no frame para o receptor (controlador). Se o Error Check estiver ativo, a soma de verificação é comparada com a soma de verificação no acoplador calculada segundo a mesma regra. O LED vermelho ‘CRC’ comunica um erro.
O ajuste é efetuada por meio da entrada ERRORCHECKING.
Error Check |
ERRORCHECKING |
|
Valor |
|
|
ignorado |
FALSE |
|
|
em processamento |
TRUE |
|
|
Tabela 5.17: Error Check, controlador
O ajuste standard é o Error Check ativado.
5.2.1.7 Extended Functions
Ainda não se encontram disponíveis os registros para outras possibilidades de diagnóstico interno (Extended Functions) no âmbito de endereços do acoplador, pelo que se deve colocar a entrada atribuída EXTENDEDFUNCTIONS em FALSE.
Extended |
EXTENDEDFUNCTIONS |
Functions |
Valor |
sem |
FALSE |
|
|
disponível |
TRUE |
|
|
Tabela 5.18: Extended Functions, controlador
No ajuste standard as outras possibilidades de diagnóstico estão desativadas.
MODBUS / Configuração |
39 |
01-03-16 |
|
|

5.2.1.8 Watchdog
O Watchdog serve para a vigilância da transmissão de dados entre o comando superior e o controlador. Se após algum tempo que está previamente definido não tiver sido estabelecida nenhuma comunicação, é possível passar o controlador para um estado seguro.
O Watchdog é ativado por meio da entrada NOWATCHDOG.
Watchdog |
NOWATCHDOG |
|
Valor |
Ativado |
FALSE |
|
|
desativado |
TRUE |
|
|
Tabela 5.19: Watchdog, controlador
O ajuste standard é o Watchdog ativado.
A excitação do Watchdog é detalhadamente descrita no capítulo 5.3.2.
40 |
MODBUS / Configuração |
|
01-03-16 |
|
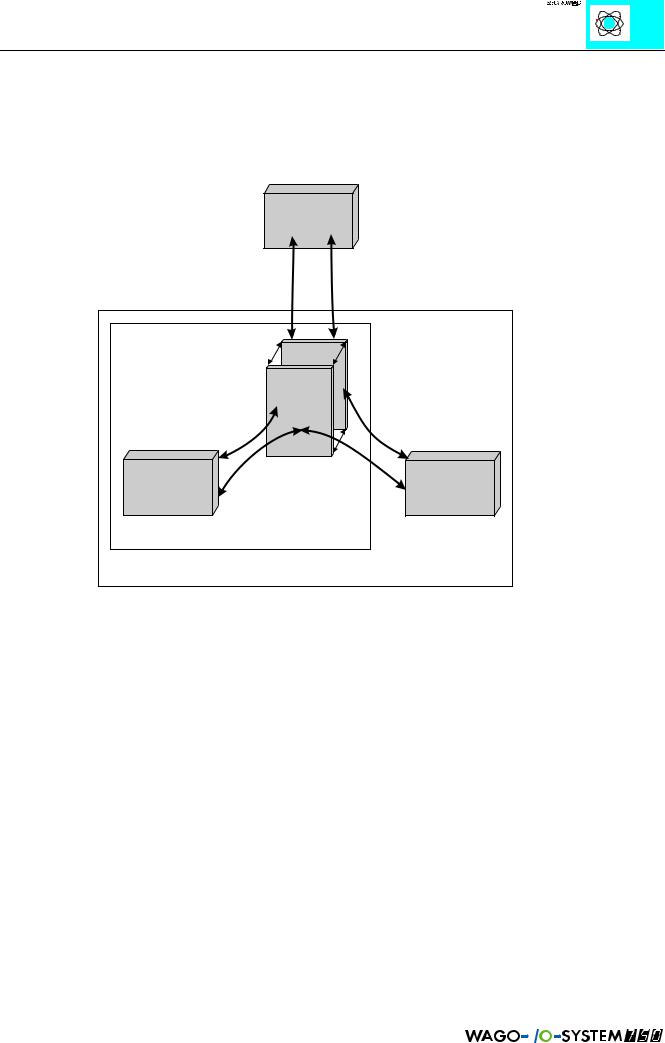
5.2.2Intercâmbio de dados entre Master MODBUS e controlador
O controlador é composto basicamente pela função CLP assim como as interfaces para os terminais de bus e para o MODBUS. Existe intercâmbio de dados entre a função CLP, os terminais de bus e o Master MODBUS. Este sistema trabalha com dois formatos de endereço diferentes.
MODBUS |
|
|
|
Master |
|
2 |
Bus |
1 |
x |
|
|
% |
|
|
Endereços |
|
|
de memória |
|
|
2 |
|
1 |
3 |
|
3 |
Função |
|
Terminais |
CLP |
|
de bus |
|
|
750-4xx....6xx |
Nó de bus de campo |
||
Figura 5.6: Intercâmbio de dados entre o Master MODBUS e o controlador |
g012817p |
1Intercâmbio de dados entre o Master MODBUS e os terminais de bus (apresentação hexadecimal ou decimal dos endereços, x)
2Intercâmbio de dados entre o Master MODBUS e (apresentação hexadecimal ou decimal dos endereços, x) e função CLP (endereços absolutos, %)
3Intercâmbio de dados entre os terminais de bus e a função CLP (endereços absolutos, %)
MODBUS / Configuração |
41 |
01-03-16 |
|
|
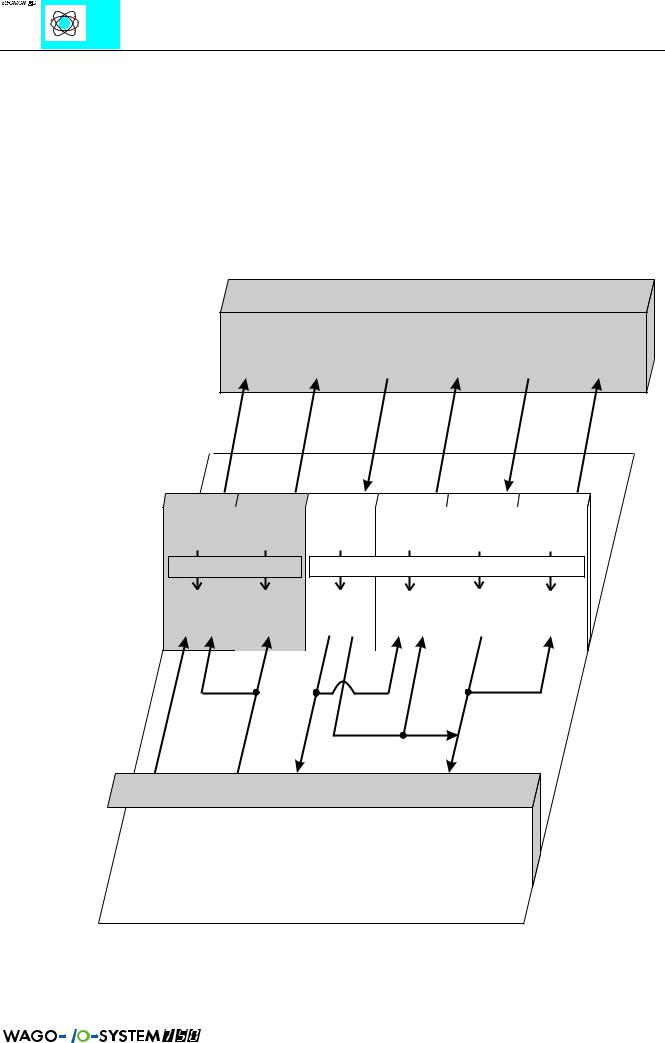
5.2.2.1 Intercâmbio de dados entre o Master MODBUS e os terminais de bus
O intercâmbio de dados entre o Master MODBUS e os terminais de bus é efetuado através da leitura e do registro por bits ou bytes.
No controlador existem 4 tipos diferentes de dados de processo:
•Palavras de entrada
•Palavras de saída
•Bits de entrada
•Bits de saída
Os endereços das palavras de dados na figura do processo das entradas e das saídas estão representados na figura seguinte:
MODBUSModbus Master
|
Word |
Bit |
Word |
Word |
Bit |
Bit |
Hex |
0x000 |
0x000 ... |
0x000 |
0x200 |
0x000 ... |
0x200 ... |
|
|
0x00F |
|
|
0x00F |
0x20F |
Dez |
0 |
0 ... 15 |
0 |
512 |
0 ... 15 |
512 ... 527 |
Controlador |
|
PAE |
|
|
PAA |
|
Hex |
0x0FF |
0x0F0 ... |
0x0FF |
0x2FF |
0x0F0 ... |
0x2F0 ... |
|
|
0x0FF |
|
|
0x0FF |
0x2FF |
Dez |
255 |
240 ... 255 |
255 |
767 |
240 ... 255 |
752 ... 767 |
Entradas |
Entradas |
Saídas |
Saídas |
analógicas |
digitais |
analógicas |
digitais |
Terminais de bus |
750-4xx....6xx |
||
|
|
|
|
Nó de bus de campo com controlador 750-812, 750-814, 750-815, 750-816
Figura 5.7: Intercâmbio de dados entre o Master MODBUS e os terminais de bus
PAE = Figura do processo das entradas
PAA = Figura do processo das saídas
g012818p
42 |
MODBUS / Configuração |
|
01-03-16 |
|