Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
Рис.7.2. Принципиальная электрическая схема системы двухзонного регулирования
Обмотка возбуждения получает питание от нереверсивного тиристорного возбудителя ТВ, который выбирается с учетом обеспечения необходимой форсировки. Сформированы обратные связи по напряжению, току якоря, току возбуждения и скорости вращения электродвигателя.
На рис. 7.3 представлена исходная структурная схема электродвигателя постоянного тока в системе двухзонного регулирования, соответствующая принципиальной электрической схеме на рис.7.2.
251
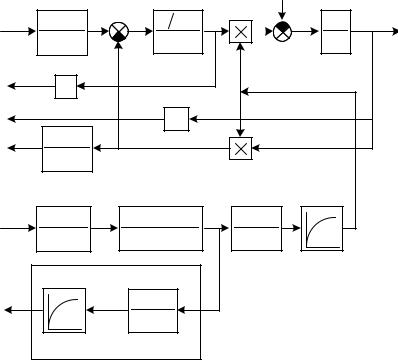
Как видно из структурной схемы рис.7.3 СУЭП в дву |
хзонной |
системе регулирования скорости вращения электропривода |
должна |
состоять из двух взаимосвязанных систем регулирования: |
|
-системы регулирования скорости изменением подводимого к электродвигателю напряжения;
-системы регулирования скорости изменением магнитного
потока.
Взаимосвязь между двумя системами регулирования осуществляется через ЭДС электродвигателя, которая поддерживается
во второй зоне регулирования на уровне Ea = k ω = Eaн = constФ . Для
выделения сигнала, пропорционального ЭДС электродвигателя, применяют датчик ЭДС (ДЭ), реализация которого рассмотрена в приложении В.
U |
|
ТП |
Ed |
|
|
Ia |
|
Мc |
|
|||
у |
kп |
|
1 Rэ |
М |
1 |
ω |
||||||
|
|
|
|
|
|
|||||||
|
|
|
Тµр +1 |
|
|
Ea |
Тэр +1 |
|
|
JΣp |
|
|
uот |
ДТ, Ш |
I |
a |
|
|
kФ |
|
|
||||
|
|
|
kот |
|
|
|
|
|
|
|||
uос |
|
|
ТГ, Дел. ω |
|
|
|
|
|||||
uоэ |
kоэ |
ДЭ |
Ea |
кос |
|
ω |
|
|
||||
|
|
|
|
|||||||||
|
|
|
Тфр +1 |
|
|
|
|
|
|
|
||
U |
|
|
ТВ |
|
Edв |
|
|
Iв |
|
|
|
|
ув |
k |
в |
|
Т |
р +1 |
1 |
|
kФ |
||||
|
|
|
|
к |
|
|
|
|
||||
|
|
|
Тµвр +1 |
|
|
Rв (ТвΣр +1) |
|
Ткр +1 |
|
|
||
uоф |
ФП |
Uотв |
ДТВ , Ш |
|
|
|
|
|||||
|
|
kотв |
|
|
|
|
||||||
|
|
|
|
|
|
|
Ткр +1 |
|
|
|
|
|
|
|
|
ДМП |
|
|
|
|
|
|
|
|
|
Рис.7.3. Исходная структурная схема объекта регулирования для двухзонной системы регулирования
252

Рассмотрим построение двухзонной системы регулирования скорости электропривода.
7.1. Настройка системы регулирования скорости по цепи якоря
Как видно из структурной схемы рис.7.3 система управления скоростью электродвигателя изменением подводимого к якорю напряжения должна иметь два контура регулирования: внутренний контур регулирования якорного тока и внешний контур регулирования скорости электродвигателя.
Настройка контура регулирования тока якоря в двухзонной СУЭП ничем не отличается от настройки контура регулирования тока якоря в однозонной СУЭП и подробно рассмотрена в 5.1.
Рассмотрим особенности настройки контура регулирования скорости электродвигателя в двухзонной СУЭП. Структурная схема контура регулирования скорости в двухзонной системе регулирования представлена на рис.7.4.
|
uзс |
|
|
|
|
РС |
uзт |
|
|
|
|
Ia |
|
|
kФ |
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
∆uс |
|
|
|
|
|
|
|
М |
|
|
|
ω |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|||||||||
|
|
|
Wрс (p) |
|
ЗТК |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
JΣp |
|
|
|
|||||
|
|
|
uос |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
Wор2 (p) |
|
|
||||||||
|
|
|
|
|
|
|
|
kос |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис.7.4. Структурная схема контура регулирования скорости в |
||||||||||||||||||||||
двухзонной СУЭП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
В контур регулирования скорости входит регулятор скорости РС, замкнутый контур регулирования тока якоря (ЗТК), настроенный на МО
и объект регулирования с передаточной функцией Wор2 (p) , охваченные обратной связью по скорости с коэффициентом koc = uoc max / ωmax , где
ωmax - максимальная скорость, достигаемая во второй зоне регулирования. Передаточная функция объекта регулирования имеет вид:
W (p) = |
kФ |
, |
(7.1) |
ор2 JΣp
253
поэтому передаточная функция регулятора скорости в соответствии с (4.11) определяется выражением:
W |
(p) = |
kот |
|
|
JΣp |
= |
JΣ |
kот |
1 |
. |
(7.2) |
|
22 T pk |
|
|
|
|
||||||||
pс |
|
oс |
|
kФ 4T k |
ос |
kФ |
|
|||||
|
|
µ |
|
|
|
µ |
|
|
|
|
||
Если в выражении (7.2) выполнить некоторые преобразования, то передаточная функция РС примет следующий вид:
W |
|
(p) = |
|
|
JΣRэ |
|
kФн k |
от |
Фн |
= |
|||||||||
|
|
4T (kФ |
|
||||||||||||||||
|
pс |
|
|
|
)2 R |
э |
k |
ос |
Ф |
|
|
||||||||
|
|
|
|
|
|
|
µ |
н |
|
|
|
|
|
|
(7.3) |
||||
|
|
Tм |
kФн kот |
1 |
|
|
|
|
1 |
|
|
|
|
||||||
= |
|
= k |
|
|
|
|
= k |
|
, |
||||||||||
|
4T R |
э |
k |
ос |
Ф* |
|
|
рсн Ф* |
|
рс |
|
||||||||
|
|
|
µ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где kрcн - коэффициент усиления РС при номинальном магнитном потоке
(5.26);
Ф* = Ф/Фн - относительная величина магнитного потока.
Как видно из (7.3) РС является пропорциональным, коэффициент передачи которого зависит от величины магнитного потока
электродвигателя. В первой зоне регулирования, когда Ф = Фн , коэффициент РС остается постоянной величиной kрc = kрсн . Во второй
зоне регулирования Ф < Фн , поэтому величину kрc необходимо увеличивать, т.е. ставить в с оответствие определенной величине магнитного потока вполне определенное значение kрc в соответствии с (7.3). Если во второй зоне регулирования оставить неизменной величину kрc = kрсн , то в первой зоне регулирования сохраняется настройка контура на МО, а во второй зоне регулирования быстродействие контура снижается, т.к. величина kрc меньше необходимой. Если во второй зоне
регулирования установить kрc = kрсн / Ф*min , то настройка на МО будет
254
выполняться при минимальном магнитном потоке, но работа в первой зоне регулирования с kрc = kрсн / Ф*min может оказаться невозможной
ввиду большого значения kрc .
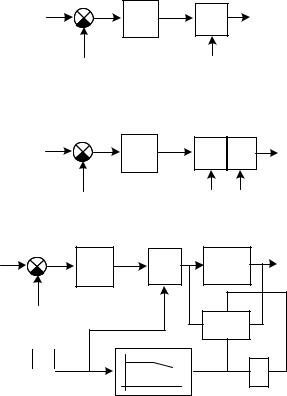
Для сохранения настройки на МО во всем диапазоне регулирования скорости электродвигателя на выходе РС устанавливают делительное устройство ДУ, на делительный вход которого подается напряжение, пропорциональное величине относительного магнитного
потока uФ* . Структурная схема РС с делительным устройством представлена на рис.7.5,а.
|
|
РС |
ДУ |
|
|
|
uзс |
kрс |
÷ uзт |
|
|
|
uос |
а) |
uФ* |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
uзс |
РС |
МДУ |
|
uзт |
|
крс |
÷ × |
|||
|
uос |
|
E*a |
ω* |
|
|
|
б) |
|
||
|
|
|
|
|
|
uзс |
РС |
МУ |
|
|
uзт |
крс |
× |
ПУ |
|
||
|
|
|
|||
|
uос |
|
|
|
|
|
БО |
|
НЭ |
uос |
−Uогр |
|
-1 |
|
+ Uогр |
|
в) |
Рис.7.5. Реализация регулятора скорости в двухзонной СУЭП
255