Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
•в режиме токоограничения (uзт = uзтmax) происходит увеличение тока выше уровня токоограничения при приложении чрезмерной нагрузки в стопорных режимах;
•увеличивается колебательность токового контура;
•увеличивается время восстановления скорости при набросе
нагрузки;
•увеличивается «ударное» падение скорости.
Контрольные вопросы:
1.Выведите передаточную функцию замкнутого токового контура
сучетом влияния внутренней обратной связи по ЭДС двигателя.
2.Чему равна относительная статическая ошибка регулирования тока под действием обратной связи по ЭДС?
3.Объясните физический смысл появления статической ошибки в контуре тока под действием внутренней обратной связи по ЭДС двигателя.
4.Каким образом выполняется компенсация влияния внутренней обратной связи по ЭДС двигателя на работу токового контура.
5.Как вывести передаточную функцию компенсирующего звена, если компенсирующая связь заводится на вход ТП?
6.Как вывести передаточную функцию компенсирующего звена, если компенсирующая связь заводится на вход регулятора тока?
7.Как влияет внутренняя обратная связь по ЭДС двигателя на работу контура регулирования тока?
8.Какой сигнал можно применять в качестве компенсирующего в однозонной системе регулирования?
5.1.3Анализ влияния режима прерывистого тока на работу токового
контура
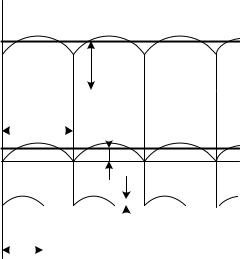
При питании электродвигателя постоянного тока от реверсивного тиристорного преобразователя с раздельным управлением вентильными группами при малых значениях момента нагрузки а, следовательно, при малых значениях якорного тока, а так же при реверсе тока якоря, в работе ТП возникает режим прерывистых токов. На рис.5.17 представлены
диаграммы действительного выпрямленного тока |
i и его среднего |
значения |
|
141
i, Id
Id > Id гр
|
λ = |
2π |
гр |
|
|
|
|
|
|||||
|
p |
=I |
|
|
||
|
|
|
|
d |
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
2π |
|
|
|
|
|
λ < |
гр |
|
|
|
|
|
p |
<I |
|
|
|
|
|
|
|
d |
|
|
|
|
|
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
а)
t
t б)
t в)
Рис.5.17. Диаграммы токов тиристорного преобразователя в различных режимах работы
Id при работе тиристорного преобразователя в непрерывном (а),
гранично – непрерывном (б) и прерывистом (в) режимах работы. Режим гранично - непрерывного тока характерен тем, что коммутация тока на
интервале проводимости вентиля λ = 2π/ p |
начинает и заканчивается |
||||||
нулевым значением якорного тока. |
|
|
|
|
|||
Величина |
гранично |
– |
непрерывного |
тока Idгр |
определяется |
||
известным выражением [10]: |
|
|
|
|
|
|
|
|
Idгр |
= |
EdoSinα (1− |
πctg |
π), |
(5.17) |
|
|
|
|
ωoLэ |
p |
|
p |
|
где Ed0 - ЭДС |
тиристорного преобразователя |
при |
нулевом угле |
||||
регулирования α; |
|
|
|
|
|
|
|
142
ω0 = 2πfс – угловая частота напряжения питающей сети частотой fс , с-1;
р – «пульсность» схемы выпрямления (р=6 для мостовой схемы выпрямления, р=3 для нулевой схемы выпрямления);
LЭ - эквивалентная индуктивность цепи выпрямления, Гн.
В режиме прерывистого тока ввиду малости величины выпрямленного тока ТП запасенной энергии в индуктивности цепи выпрямления оказывается недостаточной для поддержания протекания тока через тиристор при отрицательном напряжении «анод – катод», что приводит к запиранию тиристора и появлению отрезков времени, на которых выпрямленный ток равен нулю (рис.5.17, в). В режиме прерывистого тока ТП ток начинает и заканчивается нулевым значением
в течение каждого интервала времени T =1/ pfc , где fс - частота
питающей сети. В этом случае с точностью до интервала времени T можно пренебречь электромагнитными переходными процессами в цепи
ТП-Д (исчезает электромагнитная инерция якорной цепи, поэтому Tэ =
0). При анализе работы ТП в режиме прерывистых токов вводят фиктивное сопротивление преобразователя, величина которого зависит
от длительности протекания выпрямленного тока λ и определяется зависимостью [10,11]:
Rфик = |
8π2f |
с Lэ = |
А |
, |
(5.18) |
2 |
2 |
||||
|
pλ |
|
λ |
|
|
где А = 8π2fс Lэ - постоянная величина.
p
При уменьшении выпрямленного тока ТП уменьшается и λ. Пределы изменения углов проводимости тиристоров в прерывистом
режиме лежат в пределах от λ = 2π/ p , соответствующего гранично – непрерывному режиму работы ТП, до λ= 0. При этих пределах изменения λ величина сопротивления Rфик будет изменяться от
значения Rфик = 2fсpLэ до бесконечности Rфик = ∞. Поскольку величина фиктивного сопротивления значительно больше величины
143

сопротивления якоря электродвигателя Rфик >> Ra , то эквивалентное сопротивление цепи ТП-Д будет в основном определяться величиной фиктивного сопротивления тиристорного преобразователя: Rэ ≈ Rфик .
Тогда в режиме прерывистого тока объект регулирования в контуре регулирования якорного тока будет описываться передаточной функцией
пропорционального звена с изменяющимся в функции λ коэффициентом передачи:
W |
(p) = |
1 |
= |
1 |
= λ2 . |
(5.19) |
|
|
|||||
ор |
Rэ |
|
Rфик |
А |
|
|
|
|
|
|
|||
Для настройки контура регулирования якорного тока на МО передаточная функция РТ в соответствии с (4.11) определится:
|
|
|
|
W |
(p) = |
1 |
|
|
R |
фик |
= |
|
1 |
|
= |
k' |
, |
(5.20) |
||||
|
|
|
|
2T p k |
|
k |
|
|
T' |
p |
p |
|||||||||||
|
|
|
|
рт |
|
|
п |
от |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
µ |
|
|
|
|
|
|
рт |
|
|
|
|
|
||
где |
T' |
= |
2Tµkпkот |
= |
2Tµkпkот |
λ2 - |
|
|
постоянная |
|
времени |
|||||||||||
|
|
|
|
|
||||||||||||||||||
|
рт |
|
|
Rфик |
|
А |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
интегрирования РТ в режиме прерывистого тока; |
|
|
|
|
|
|||||||||||||||||
|
k' = |
1 |
|
' - коэффициент передачи интегрального РТ. |
|
|||||||||||||||||
|
|
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
рт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таким образом, при переходе из режима непрерывного тока в режим прерывистого тока для сохранения настройки контура регулирования якорного тока на МО необходимо перейти от
структуры ПИ регулятора тока к структуре И регулятора тока и изменять постоянную времени РТ пропорционально квадрату
длительности протекания якорного тока λ2 . Чем глубже заходит ТП в режим прерывистого тока, тем меньше длительность протекания
якорного тока λ , тем меньше должна быть величина постоянной времени интегрирования Tрт' (или должна быть больше величина
коэффициента передачи k' ).
144

Т. к. в режиме прерывистого тока увеличивается величина
эквивалентного |
сопротивления |
цепи выпрямления |
Rэ ≈ Rфик , |
следовательно, |
увеличивается |
и электромеханическая |
постоянная |
времени электропривода Tм' ≈ JΣRфик / c2 . Поскольку электромагнитная
постоянная времени в этом режиме Tэ = 0, то изменяется структурная
схема электродвигателя: вместо колебательного звена электродвигатель представляется инерционным звеном с возросшей постоянной времени
Tм' , что приводит к снижению быстродействия электропривода в режиме прерывистых токов.
Так как в режиме прерывистого тока величина тока якоря мала, то можно говорить о том, что сигнал обратной связи по току практически отсутствует, т.е. контур регулирования якорного тока размыкается. Это приводит к тому, что резко ухудшаются динамические свойства контура регулирования – снижается быстродействие и возрастает перерегулирование за счет запаздывания замыкания обратной связи при выходе из режима прерывистого тока.
Рассмотрим конструктивные решения, позволяющие улучшить работу контура регулирования якорного тока в режиме прерывистых токов.
5.1.3.1. Адаптивный регулятор тока с эталонной моделью
Эталонная модель – это модель замкнутого контура регулирования якорного тока, настроенного на МО. На рис. 5.18 показана структурная схема контура регулирования якорного тока, настроенного на МО, с применением эталонной модели М с передаточной функцией
Wм (p) .
Эталонная модель в точном варианте реализации имеет передаточную функцию оптимального фильтра второго порядка (см. табл.1):
Wм (p) = 2Tµ2p2 +12Tµp +1,
в упрощенном (аппроксимируемом) варианте – передаточную функцию фильтра первого порядка:
145