Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
Из равенства (5.13) легко определяется передаточная функция компенсирующего звена:
W |
(p) = |
Tµp +1 |
. |
(5.14) |
|
||||
к1 |
|
kоэkп |
|
|
|
|
|
||
Для упрощения технической реализации компенсирующего звена с достаточной для практических целей точностью пренебрегают малой
постоянной времени Tµ и применяют упрощенную передаточную
функцию компенсирующего звена, которое становится пропорциональным:
W |
(p) ≈ |
1 |
= k |
k1 |
. |
(5.14) |
|
||||||
к1 |
|
kоэkп |
|
|
||
|
|
|
|
|
||
В СУЭП однозонного регулирования скорости при постоянстве номинального магнитного потока электродвигателя в качестве компенсирующего сигнала вместо сигнала по ЭДС двигателя (для чего необходимо применять датчик ЭДС) можно использовать сигнал
обратной связи по скорости uос , |
тогда |
передаточная |
функция |
||||
компенсирующего звена будет равна: |
|
|
|
|
|
|
|
W |
(p) ≈ |
kФн |
|
= k |
k1 |
, |
(5.15) |
|
|||||||
к1 |
|
kосkп |
|
|
|
||
|
|
|
|
|
|
||
где kос - коэффициент обратной связи по скорости вращения электродвигателя.
Иногда в качестве компенсирующего сигнала используют сигнал по напряжению двигателя [12]. В некоторых случаях компенсирующую обратную связь подают через компенсирующее звено с передаточной
функцией Wк2 (p) на дополнительный вход РТ (показано на рис.5.13 штриховой линией). В этом случае по аналогии с (5.13) (пренебрегая
136
малой постоянной времени Tµ ) определяется передаточная функция компенсирующего звена:
|
|
|
|
W |
(p) ≈ |
Tдp |
, |
(5.16) |
|
|
|
|
|
||||
|
|
|
|
к2 |
|
Tэp +1 |
|
|
|
|
|
|
|
|
|
|
|
где |
T |
= |
Tрт |
- постоянная |
времени |
дифференцирования |
||
|
||||||||
|
д |
|
kоэkп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
компенсирующего звена.
Пример 8. Для параметров СУЭП, приведенных в примере 5, оценить влияние обратной связи по ЭДС электродвигателя, если Тм =
0,08 с.
Используя выражение (5.12) определим ошибку в контуре регулирования якорного тока от влияния внутренней обратной связи по ЭДС электродвигателя: i = 2Tμ /(2Tμ + Tм) = 2*0,01/(2*0,01 + 0,08) =
0,02/0,1 = 0,2, что составляет 20% от установившегося значения тока. Результат моделирования переходных процессов uот = f(t) в
контуре тока при скачкообразном задании uзт = uзтmax = 10В для
условий, приведенных в примере 4, показаны на рис.5.14. Как видно из рис. 5.14 без учета влияния ЭДС электродвигателя заданное и
действительное значения |
тока якоря в |
установившемся режиме |
||
одинаковые uзт |
= uот = |
10В (кривая 1). |
Под действием |
ЭДС |
электродвигателя, |
величина действительного |
значения якорного |
тока |
|
(напряжения обратной связи по току) в установившемся режиме стала
меньше заданного максимального |
тока uот =8В |
< uзт =10В, |
т.е. |
появилась статическая ошибка |
регулирования |
якорного |
тока |
∆uт = uзт − uот =2В, что соответствует уменьшению величины якорного тока на 20%, при этом увеличилось перерегулирование.
137
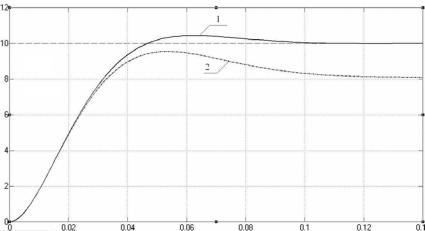
1- без учета влияния ЭДС двигателя; 2- с учетом влияния ЭДС двигателя
Рис.5.14. Реакция токового контура на скачек uзт=10В:
Пример 9. Для параметров СУЭП, рассмотренных в примерах 5 и
8 (kп = 25; Tμ = 0,01с; Rэ = 0,115Ом; Тэ = 0,05с; Тм = 0,08с; kот= 0,0208
В/А; Трт = 0,09с; kрт = 0,556), рассчитать параметры компенсирующих звеньев, устраняющих влияние ЭДС электродвигателя на работу токового контура.
Определим значение коэффициента обратной связи по ЭДС
электродвигателя исходя из того, что при максимальном значении Eamax = 240В максимальное напряжение обратной связи будет равно uоэmax= 10В:
kоэ= 10/240 = 0,0417. Если компенсирующая положительная обратная |
|
связь по ЭДС будет заведена на вход ТП, |
то применятся |
компенсирующее звено с передаточной функцией (5.14): kk1 = 1/(kоэkп) = 1/(0,0417*25) = 0,959. Если компенсирующая положительная обратная связь по ЭДС заводится на вход ПИ РТ, то применяется компенсирующее
звено с |
передаточной |
функцией (5.16): |
Wk2(p)= |
Тдp/(Tэp |
+ 1) = |
Tртp/(kоэkп)*(Тэp + 1) = 0,09p/(0,0417*25)(0,05p + 1) |
= = 0,086p/(0,05p + |
||||
1). |
|
|
|
|
|
На рис. 5.15 показаны результаты моделирования работы токового |
|||||
контура |
uот = f(t) |
при отработке |
скачкообразного |
задания |
|
uзт = uзтmax =10В. Кривая 1 – реакция токового контура без учета влияния обратной связи по ЭДС электродвигателя; кривая 2 – реакция
138
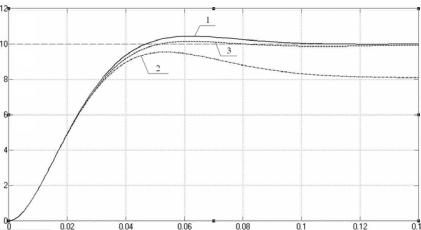
токового контура с учетом действия ЭДС электродвигателя; кривая 3 – реакция токового контура с положительной компенсирующей обратной связью по ЭДС электродвигателя. Из рис.5.15 видно, что в результате применения компенсирующей обратной связи кривая 3 приблизилась к оптимальному переходному процессу (кривая 1), однако небольшая
статическая ошибка осталась ( ∆i% ≤1%), что объясняется применением компенсирующего звена с упрощенной передаточной функцией без учета малой постоянной времени Tµ .
1- без учета влияния ЭДС двигателя; 2- с учетом влияния ЭДС двигателя; 3 – с компенсирующей обратной связью
Рис.5.15. Реакция токового контура на скачек uзт=10В.
На рис.5.16 показаны переходные процессы ЭДС ТП Ed = f(t) (кривые 1 и 2) и ЭДС электродвигателя Ea = f(t) (кривые 3 и 4) при
скачкообразном задании uзт = uзтmax . Кривые 1 и 3 соответствуют схеме
с компенсирующей положительной обратной связью по ЭДС электродвигателя (переходный процесс тока – кривая 3 на рис.5.15); кривые 2 и 4 – без компенсирующей обратной связи по ЭДС электродвигателя (переходный процесс тока – кривая 2 на рис.5.15).
139
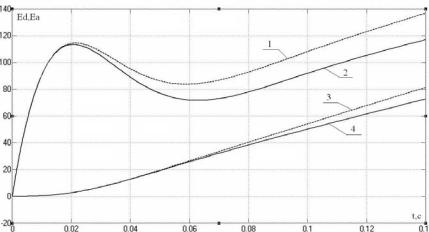
Рис.5.16. Переходные процессы Ed, Ea = f(t): 1 и 3 - с компенсирующей обратной связью по ЭДС; 2 и 4 - без компенсирующей
обратной связи по ЭДС
Как видно из сравнения переходных процессов на рис.5.16 применение положительной компенсирующей обратной связи по ЭДС
электродвигателя приводит к увеличению выходной ЭДС ТП Ed , что
приводит к увеличению якорного тока до заданного значения при полной компенсации действия ЭДС электродвигателя. Увеличение якорного тока до максимальной величины привело к тому, что темп изменения ЭДС
электродвигателя Ea (кривая 3) стал больше, чем темп изменения ЭДС электродвигателя Ea без компенсирующей обратной связи (кривая 4).
На практике необходимость введения компенсирующей обратной связи по ЭДС и параметры компенсирующего звена уточняется окончательно при наладке электропривода.
Анализ влияния внутренней обратной связи по ЭДС электродвигателя на свойства СУЭП позволяет сделать следующие выводы:
• уменьшается коэффициент передачи замкнутого контура тока, что снижает быстродействие САР и приводит к недоиспользованию двигателя по току;
140