Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
функцию колебательного звена с настройкой на МО (5.5) (кривая 1) и инерционного звена (5.9) (кривая 2).
Как видно из рис.5.11, быстродействие токового контура при представлении его колебательным и инерционным звеном практически остается одинаковым, что позволяет при настройке внешнего контура регулирования скорости вращения электродвигателя, представлять замкнутый токовый контур инерционным звеном (фильтром) с
постоянной времени 2Tµ .
Рис.5.11. Переходные процессы uот=f(t) при скачке задания: кривая 1- токовый контур как колебательное звено; кривая 2 - токовый
контур как инерционное звено.
Контрольные вопросы:
1.Чему равна ошибка регулирования якорного тока (поясните, используя передаточную функцию регулятора тока)?
2.Что определяет быстродействие токового контура?
3.Почему на быстродействие токового контура не оказывает влияние постоянная времени Tэ ?
4.Как получить передаточную функцию разомкнутого контура регулирования якорного тока?
5.Поясните вид переходных процессов на рис.5.7.
6.Какой вид имеют ЛАЧХ и ЛФЧХ разомкнутого токового
контура?
131

7.Чему равна частота среза разомкнутого токового контура?
8.Как получить передаточную функцию замкнутого токового
контура?
9.Почему замкнутый токовый контур можно представить фильтром первого порядка?
5.1.2Анализ влияния внутренней обратной связи по ЭДС электродвигателя на работу токового контура
При настройке контура регулирования якорного тока внутренняя обратная связь по ЭДС двигателя не учитывалась, однако в некоторых случаях она оказывает существенное влияние на работу СУЭП электропривода. На рис.5.12,а представлена структурная схема контура регулирования якорного тока с учетом внутренней обратной связи по ЭДС двигателя, а на рис.5.12,б преобразованная структурная схема контура регулирования тока. Из рис.5.12,б видно, что передаточная функция объекта регулирования токового контура принимает вид колебательного звена, и для сохранения настройки на МО необходимо применить ПИД регулятор тока, что затрудняет его техническую реализацию. Найдем передаточную функцию замкнутого токового контура с ПИ регулятором тока, имеющего передаточную функцию (5.4), соответствующую настройке на МО:
W (p) = |
Ia (p) |
= |
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
= |
|||
uзт (p) |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
||||||
|
замт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+kот |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Тэp +1 |
|
|
kп |
|
|
|
1/R |
э |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
2Тµ |
kпkот |
p |
|
T p + |
1 |
|
Тэp +1+ |
1 |
T p |
|
|
|||
|
|
|
|
|
|
|
|
µ |
|
|
|
(5.10) |
||||||||
|
|
|
|
|
|
R |
э |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
(T p +1) |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
= |
|
|
|
kот |
|
э |
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(T p +1)(2T T p2 +2T p + |
2Tµ |
|
|
|
|
|
|
|
|
|||||||||||
|
|
) +T p +1 |
|
|
|
|
||||||||||||||
µ |
µ э |
|
|
|
µ |
|
|
|
Tм |
э |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Для статического режима работы токового контура с учетом влияния внутренней обратной связи по ЭДС электродвигателя из выражения (5.10) при p=0 получается следующее соотношение:
132
u |
от |
= |
iуст |
= |
|
1 |
|
= |
T |
|
|
|
|
|
|
|
|
|
|
м |
|
. |
(5.11) |
||||
u |
i |
|
2Tµ |
|
|
2T + T |
|||||||
зт |
|
зад |
|
T |
+1 |
|
|
||||||
|
|
|
|
|
µ |
м |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
Из соотношения (5.11) видно, что вследствие влияния внутренней обратной связи по ЭДС электродвигателя контур регулирования якорного тока, настроенный на МО, становится статическим, т.е. появляется
ошибка регулирования ∆uт = uзт − uот ≠ 0 .
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rэ |
|
|
|
|
|
|
|
|
|
uзт |
|
∆uт |
|
|
|
Uу |
|
|
|
|
Ed |
|
|
|
Ea |
|
|
|
Тмр |
|
|
|
|
Ia |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
kп |
|
|
|
|
|
|
|
|
|
1 R |
э |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
Wрт (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
uот |
|
|
|
|
|
|
Тµр +1 |
|
|
|
|
|
|
|
|
Тэр +1 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
kот |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
uзт |
∆uт |
|
|
|
Uу |
|
|
|
|
Ed |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ia |
||||||
|
|
|
|
|
kп |
|
|
|
|
1 R |
э |
|
|
|
|
|
|
|
|
|||||||||||||||||
|
Wрт (p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Тµр +1 |
|
|
|
Тэр +1+ |
Tмp |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
uот |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
kот |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
б)
Рис.5.12. Исходная (а) и преобразованная (б) структурные схемы контура регулирования якорного тока с учетом внутренней обратной
связи по ЭДС двигателя
Относительная статическая ошибка регулирования тока при скачке задания будет равна:
133
∆i = |
i |
зад −iуст |
=1− |
i |
уст |
=1 |
− |
T |
= |
2Tµ |
|
; |
|||||
|
|
|
|
|
|
|
м |
|
|
|
|||||||
|
|
i |
зад |
i |
зад |
2T |
+ T |
2T + T |
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
µ |
м |
|
µ |
|
м |
(5.12) |
||
|
|
|
|
2Tµ |
|
|
|
|
|
|
|
|
|
|
|
|
|
∆i% = |
|
|
|
100%. |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
2Tµ + Tм |
|
|
|
|
|
|
|
|
|
|
|
|||
Появление статической |
ошибки |
∆i объясняется |
|
непрерывным |
|||||||||||||
увеличением скорости вращения электродвигателя и, |
соответственно, |
||||||||||||||||
величины ЭДС незаторможенного двигателя. Ток якоря зависит как от ЭДС ТП, так и от ЭДС электродвигателя. Поэтому ко мпенсация влияния на ток якоря непрерывно растущей величины ЭДС электродвигателя в принципе возможна лишь путем соответствующего непрерывного увеличения ЭДС ТП. Для этого требуется непр ерывное увеличение выходного сигнала регулятора тока. Такое увеличение сигнала РТ в установившемся режиме в принципе возможно лишь за счет действия его интегральной части при наличии ненулевой установившейся ошибки на его входе. Именно поэтому, несмотря на наличие в структуре
регулятора |
интегральной составляющей, |
возникает |
определенное |
|
установившееся рассогласование |
между |
заданным и |
фактическим |
|
значениями тока якоря. Иными словами, в условиях изменения ЭДС электродвигателя ресурсы интегральной части регулятора расходуются на поддержание постоянства тока. На полную ликвидацию установившейся ошибки по току их уже недостаточно.
Как видно из (5.12) статическая ошибка регулирования тока зависит от соотношения постоянных времени Тµ и Тм , причем, чем
меньше величина Тм , тем больше ошибка в контуре регулирования тока.
Пример 7. Определить соотношение постоянных времени Tμ и Tм при которых ошибка регулирования якорного тока не превысит 10%.
На основании выражения (5.12) можно составить следующее уравнение: 2Tμ /(2Tμ + Tм) ≤ 0.1, из которого легко можно получить следующее условие: Тм ≥ 18Tμ, при котором ошибка регулирования якорного тока не превысит 10%.
В тех случаях, когда ошибка регулирования тока превышает заданную, необходимо принимать меры по устранению влияния внутренней обратной связи по ЭДС электродвигателя на работу токового контура.
134
Для устранения ошибки регулирования тока, необходимо увеличивать выходную ЭДС ТП Ed пропорционально величине ЭДС
электродвигателя Ea , для чего применяют комбинированную систему
регулирования якорного тока с положительной обратной связью по ЭДС электродвигателя [7,9,14].
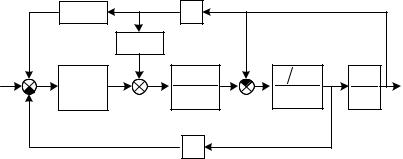
На рис.5.13 показан наиболее рациональный вариант компенсирующей положительной обратной связи по ЭДС, которая воздействует непосредственно на вход ТП (на дополнительный вход суммирующего усилителя) через компенсирующее звено с передаточной
функцией Wк1(p) . Для получения сигнала, пропорционального величине ЭДС электродвигателя uоэ , применяют датчик ЭДС
(приложение Г), представленный на структурной схеме пропорциональным звеном с коэффициентом обратной связи по ЭДС
kоэ .
|
W |
(p) |
|
uоэ |
к |
оэ |
|
|
|
|
|
|
|
к2 |
|
|
|
|
|
|
|
|
|
|
|
|
РТ |
Wк1 |
(p) |
ТП |
|
Ea |
|
|
|
|
||
uзт |
Uрт |
Uу |
Ed |
1 Rэ |
Iа |
|
Ea |
|||||
Тэр +1 |
кп |
Rэ |
||||||||||
|
Трт p |
|
|
Тµр +1 |
|
|
Тэр +1 |
|
Тмр |
|
||
|
uот |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
кот |
|
|
|
|
|
|
|
Рис. 5.13. Компенсация влияния внутренней обратной связи по ЭДС электродвигателя
Передаточная функция компенсирующего звена Wк1(p) определяется из условия равенства прохождения сигнала ЭДС Ea через
датчик ЭДС, компенсирующее звено и ТП на вход сумматора для компенсации действия отрицательной обратной связи по ЭДС:
E |
(p)k |
W |
(p) |
kп |
= E |
(p) . |
(5.13) |
|
|
||||||||
a |
|
оэ к1 |
|
Tµp +1 |
a |
|
|
|
|
|
|
|
|
|
|
||
|
|
135 |
|
|
|
|
|
|