Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
|
|
Кл1 |
|
+uзт |
R1 |
R3 C1 |
|
R2 |
|
||
-uот |
|
||
R4 |
-Uу |
||
|
DA1
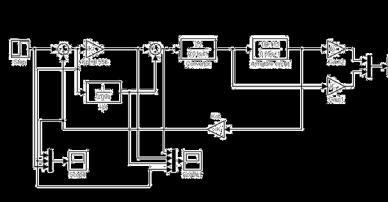
Рис.5.4. Принципиальная электрическая схема регулятора тока
Передаточная функция операционного усилителя DA1 по входам
задания uзт и цепи обратной связи uoт определяется выражением: |
|
||
W (p) = R3C1p +1 |
= R3C1p +1 . |
(5.6) |
|
DA1 |
R1C1p |
R2C1p |
|
|
|
||
Из выражения (5.6) видно, что для обеспечения одинакового коэффициента передачи по цепи задания и обратной связи (т.е. для
обеспечения одинакового масштаба напряжений uзт и uoт ) необходимо, чтобы выполнялось равенство величин сопротивлений входных резисторов R1 = R2 . Для настройки контура регулирования якорного
тока на модульный оптимум, необходимо выполнение равенства передаточных функций регулятора РТ (5.4) и регулятора DA1 (5.6):
Tэp +1 |
|
= |
Tэp +1 |
= |
R3C1p +1 . |
(5.7) |
kпkот |
|
|||||
p |
T p |
|
R C p |
|
||
2Tµ Rэ |
рт |
|
1 1 |
|
||
|
|
|
|
|
||
Из равенства (5.7) можно получить следующие зависимости: R3C1 = Tэ ; R1C1 = Tрт , на основании которых, задавшись величиной
121

емкости конденсатора C1 , можно рассчитать величины сопротивлений
резисторов R1 = R2 = Tрт  C1 , R3 = Tэ
C1 , R3 = Tэ  C1 . В схеме РТ (рис.5.4) в
C1 . В схеме РТ (рис.5.4) в
цепи обратной связи операционного усилителя DA1 включен контакт реле Кл1, шунтирующий цепь обратной связи DA1 для предотвращения
возможного дрейфа нуля регулятора и заряда конденсатора C1 при стоянке электропривода.
Пример 5. Реализовать регулятор тока на операционном усилителе (рис.5.4) для электропривода с параметрами: Iндв= 192 А; λI = 2,5; kп = 25; Tμ = 0,01с; Rэ = 0,115Ом; Тэ = 0,05с. Рассчитаем величину коэффициента обратной связи по току, задавшись максимальной
величиной uзтma x= uотma x= 10В, kот= uотma x/( λI*Iндв)=10/(2,5*192)=0,0208
В/А. Тогда постоянная времени РТ будет равна Трт=2 Tμ*kп*kот/Rэ=
2*0,01*25*0,0208/0,115 = 0,09 с, коэффициент усиления РТ равен kрт = Тэ
/Трт = 0,05/0,09 = 0,556. Зададимся величиной емкости конденсатора С1= 1,0 мкФ и рассчитаем величину сопротивления резистора R3 = Т э/С1= 0,05/1,0 = 50 кОм, с учетом ряда Е24 принимаем стандартное значение R3= 51 кОм, тогда величина сопротивления резисторов R1 и R2 будет равна R1 = R2 =R3/kрт= 51/0,556 = 91,7 кОм, с учетом ряда Е24 величина сопротивления берется равной R1 = R2= 91 кОм.
Контрольные вопросы:
1.Как выполняется построение систем подчиненного регулирования? Что входит в состав контуров регулирования?
2.Почему на практике не применяют более трех контуров регулирования?
3.Что должен обеспечивать регулятор в системе подчиненного регулирования координат?
4.Выведите передаточную функцию регулятора при настройке i – го контура на модульный оптимум.
5.От чего зависят передаточная функция и свойства регулятора при настройке на модульный оптимум?
6.Какой будет передаточная функция регулятора, если объект регулирования представлен колебательным звеном? (Инерционным, интегрирующим?)
7.Почему в системе ТП-Д получаются два контура регулирования
вСУЭП подчиненного регулирования? Какие это контуры?
8.Какие допущения принимают при настройке контура регулирования якорного тока?
122
9.Какие звенья входят в контур регулирования тока якоря?
10.Как правильно рассчитать коэффициент обратной связи по
току?
11.Выведите передаточную функцию регулятора тока.
12.Как реализовать регулятор тока на операционном усилителе?
13.Почему коэффициенты передачи регулятора тока по входу задания и входу обратной связи по току принимают равными?
14.Чему равны коэффициент усиления и постоянная времени интегрирования регулятора тока?
15.За счет чего происходит «компенсация» постоянной времени
Tэ ?
5.1.1.Динамические свойства контура регулирования тока якоря
Рассмотрим динамические свойства контура регулирования якорного тока, настроенного на модульный оптимум, для параметров, рассчитанных в примере 5, для чего выполним моделирование контура тока с применением пакета Matlab – Simulink. Схема модели представлена на рис.5.5, где на вход регулятора тока подается
скачкообразное задание максимального напряжения uзтmax = 10 В.
Рис.5.5. Схема модели контура регулирования якорного тока
Результаты моделирования представлены на рис. 5.6…5.9. На рис.5.6 приведены переходные процессы напряжения задания величины
якорного тока uзт = 10 В на входе пропорционально - интегрального РТ,
123
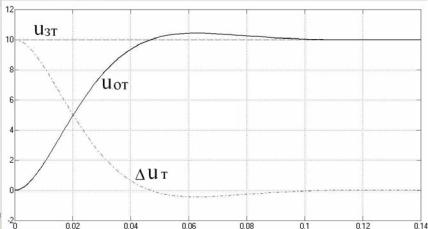
напряжения обратной связи по величине якорного тока uот = kотIa , и ошибки регулирования по току ∆uт = uзт − uот .
Как видно из рис.5.6 контур тока настроен на модульный оптимум, переходная функция uот = f(t), пропорциональная величине якорного
тока, имеет перерегулирование σ = 4,3%, время нарастания tн = 4,7*Тμ = 4,7*0,01 = 0,047 с, ошибка регулирования в статическом режиме ∆uт =
uзт − uот = 0.
На рис.5.7,а показана отработка ПИ регулятором тока скачка задания uзт = 10 В, показаны изменение во времени ошибки
регулирования на входе РТ ∆uт , пропорциональной uп и интегральной uи составляющих выходного напряжения РТ uвых = uп + uи .
Рис.5.6. Переходные процессы uзт, uот, uт = f(t) при скачке задания uзт = 10В
Как видно из рис.5.7,а пропорциональная составляющая выходного напряжения РТ повторяет ∆uт с коэффициентом передачи
kрт ( uп = kрт∆uт ), |
интегральная составляющая uи |
эквивалентна |
величине суммарной |
площади, ограниченной кривой |
∆uт и осью |
|
124 |
|

времени ( uи = |
1 |
∫t |
∆uт (t) ), после затухания переходных процессов на |
|
T |
||||
|
рт |
0 |
|
|
выходе РТ устанавливается величина такого |
выходного напряжения |
|||
uвых = uп + uи = Uу , которое обеспечивает |
необходимую выходную |
|||
ЭДС ТП Ed для поддержания в якорной цепи тока заданной величины:
uвых = uи = Uу = Ed kп = (Ia Rэ ) kп = (2,5IндвRэ ) kп .
На рис.5.7, б показаны переходные процессы относительных величин якорного тока I*a = Ia /Iндв и ЭДС тиристорного преобразователя
E*d = Ed /Edн при скачке задания uзт = 10 В на входе РТ, откуда видно, что переходный процесс тока I*a = f(t) является оптимальным и имеет
показатели оптимального контура второго порядка (таблица 1). Получение оптимального переходного процесса, зависящего только от
величины минимальной постоянной времени Tµ и не зависящего от
«большой» постоянной времени Tэ , обеспечивается примерно двукратной форсировкой выходной ЭДС ТП.
125