Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
В таблице 1 Tµ - минимальная (некомпенсируемая) постоянная времени системы регулирования, как ее принято обозначать в ТАУ.
На практике число контуров регулирования не превышает трех, т.к. с повышением числа контуров регулирования снижается быстродействие системы регулирования.
Контрольные вопросы:
1.С какой целью применяют задержанную отрицательную обратную связь по току якоря?
2.Как реализуется задержанная обратная связь?
3.Как влияет величина коэффициента блока нелинейности на вид «экскаваторной» характеристики?
4.Как изменится вид механической характеристики при увеличении коэффициента обратной связи по току якоря?
5.Как изменится вид электромеханической характеристики при изменении величины напряжения задания на входе регулятора?
6.Объясните работу блока нелинейности на рис. 3.23.
7.Как задать необходимую величину тока отсечки в схеме рис.3.23?
8.На основании рис.3.23 разработайте схему блока нелинейности для реверсивного электропривода.
9.Что способствовало широкому распространению систем подчиненного регулирования с последовательной коррекцией?
10.Какой переходный процесс принято считать оптимальным?
11.Что является основой оптимальных систем регулирования?
12.Каким должно быть соотношение постоянных времени для настройки на модульный оптимум?
13.Как изменяется переходный процесс при отклонении соотношения постоянных времени от оптимального?
14.Какие показатели имеют контуры регулирования при настройке на модульный оптимум?
15.Как изменяется быстродействие контура регулирования при увеличении номера контура регулирования?
4.2. Принцип построения систем подчиненного регулирования координат
В основе построения систем подчиненного регулирования координат (СПРК) лежит определенное структурное представление
111
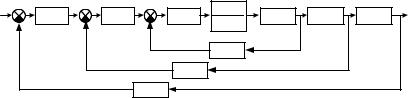
объекта регулирования, т.е. силовой части электропривода [2,7,9]. Структурная схема многоконтурной СПРК представлена на рис.4.3, где i- число регулируемых координат и, соответственно, число контуров регулирования.
u |
|
uз2 |
|
u |
|
|
Ф |
X |
|
X |
X2 |
X |
|
|
з3 |
|
з1 |
|
|
|
0 |
3 |
|||||||
|
|
|
|
|
1 |
|
|
1 |
|
|||||
|
|
Wр3 (p) |
Wр2 (p) |
|
Wр1 |
(p) |
|
|
Wор1 (p) |
Wор2 (p) |
|
Wор3 (p) |
|
|
|
|
|
Тµр |
+1 |
|
|
|
|||||||
|
|
uос3 |
uос2 |
|
uос1 |
|
Wос1 (p) |
|
i=1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
i=2 |
|
|
|
|
||
|
|
|
|
|
Wос2 (p) |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
i=3 |
|
|
|
|
||
|
|
|
|
Wос3 (p) |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 4.3. Структурная схема системы подчиненного регулирования координат
Объект регулирования представлен в виде цепи последовательно соединенных звеньев направленного действия с передаточной функцией
Wopi (p) .
Разбиение модели объекта на звенья производится с таким расчетом, чтобы выходными (регулируемыми) координатами звеньев
Xi оказались физические величины, представляющие интерес с точки
зрения регулирования и контроля электропривода (ток якоря, скорость вращения двигателя, угол поворота и т.д.).
В состав первого контура регулирования (i=1) входит фильтр Ф, ограничивающий полосу пропускания системы и обеспечивающий ее помехозащищенность.
Постоянная времени фильтра обозначается Tµ и является
минимальной (некомпенсируемой) постоянной времени системы подчиненного регулирования.
Для регулирования i-ой координаты Xi предусматривается замкнутый контур регулирования, в состав которого входит регулятор с передаточной функцией Wpi (p) , на вход которого подаются
напряжение задания величины i-ой координаты uзi и напряжение отрицательной обратной связи uосi по регулируемой координате.
Для формирования напряжения обратной связи предусматривается датчик соответствующей регулируемой координаты с передаточной
функцией Woci (p) .
112
Первый контур регулирования является внутренним контуром регулирования. Напряжение задания для него формирует регулятор второго контура, поэтому говорят, что внутренний контур подчинен внешнему (или управляется внешним контуром). Замкнутый внутренний контур регулирования будет представлять фильтр со своей постоянной времени для внешнего контура регулирования.
Контурный регулятор выполняется в виде последовательного корректирующего устройства, обеспечивающего желаемые свойства контура регулирования.
Так как в структуре САР можно выделить ряд последовательно вложенных друг в друга контуров, то общее название этих систем – многоконтурные системы подчиненного регулирования координат с последовательной коррекцией.
4.3. Определение передаточной функции регулятора
Настройка контура регулирования для получения заданных динамических и статических характеристик сводится к определению структуры и параметров контурного регулятора. Регулятор строится таким образом, чтобы своим действием он:
•компенсировал действие (и прежде всего проявление инерционности) звена объекта регулирования, попадающего в данный контур;
•обеспечивал астатизм системы по управляющему воздействию (т.е. равенство нулю установившейся ошибки при определенном типе управляющего воздействия);
•обеспечивал оптимизацию процессов регулирования по выбранному критерию минимизации интегральной среднеквадратичной ошибки регулирования.
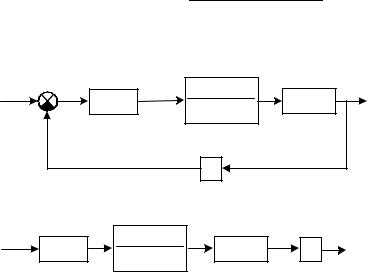
Рассмотрим выбор передаточной функции регулятора i-го контура регулирования при настройке контура на модульный оптимум. На рис.4.4,а представлена структурная схема i-го контура регулирования, в который входят регулятор, передаточную функцию которого необходимо определить, замкнутый внутренний i-1 контур регулирования, с
коэффициентом обратной связи koi-1 (фильтр для i-го контура регулирования), объект регулирования с передаточной функцией Wopi (p) и цепь обратной связи с коэффициентом передачи koi .
На основании таблицы 1 передаточная функция замкнутого (i-1)-го контура регулирования с коэффициентом обратной связи koi-1 примет вид:
113
|
|
W |
(p) = |
Xi−1(p) |
= |
1/ koi−1 |
+1) |
+1 |
. |
(4.7) |
||||
|
|
замi-1 |
|
u |
зi-1 |
(p) |
|
2i T p(2i−1T p |
|
|
||||
|
|
|
|
|
|
|
µ |
µ |
|
|
|
|
||
uзi |
|
Рег |
|
|
|
|
Ф |
|
|
|
|
Xi |
||
|
|
|
|
|
1/ кoi−1 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
Wpi (p) |
|
|
|
2i−1 Тµ р +1 |
|
Wopi (p) |
|||||
|
|
uоci |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
коi |
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
u |
|
Рег |
|
|
|
Ф |
|
|
|
X |
|
|
uоci |
|
зi |
|
1/ кoi−1 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
||||||||
|
Wpi (p) |
|
|
Wopi (p) |
i |
коi |
|
|
||||||
|
|
|
i−1 |
Тµ р +1 |
|
|
|
|||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|||
б)
Рис.4.4. Структурная схема i-го контура регулирования а)- замкнутого, б)- разомкнутого
Передаточная функция разомкнутого i-го контура регулирования (рис.4.4,б), когда входной координатой является напряжение задания
величины i-ой координаты uзi на |
входе регулятора, а выходной – |
||||||||||
напряжение обратной связи uосi |
по регулируемой координате Xi |
||||||||||
определяется соотношением: |
|
|
|
|
|
|
|
||||
W |
(p) = uoci (p) |
= W (p) |
1/ koi−1 |
|
W |
(p)k |
|
. |
(4.8) |
||
2i−1T p +1 |
|
||||||||||
разi |
u |
зi |
(p) |
pi |
opi |
|
oi |
|
|
||
|
|
|
|
µ |
|
|
|
|
|
|
|
Чтобы обеспечить настройку i-го контура регулирования на модульный оптимум, необходимо, чтобы передаточная функция разомкнутого i-го контура регулирования соответствовала передаточной
114

функции разомкнутого i-го контура регулирования, настроенного на модульный оптимум (см. таблицу 1), т.е. чтобы выполнялось равенство:
Wразi (p) = WразМОi (p) , |
(4.9) |
где WразМОi (p) = |
1 |
- передаточная функция |
2i Tµp(2i−1Tµp +1) |
разомкнутого i-го контура регулирования с единичной обратной связью, настроенного на модульный оптимум (см. таблицу 1).
Тогда в соответствии с (4.9) можно записать следующее равенство:
W (p) |
1/ koi−1 |
|
W |
(p)k |
|
= |
1 |
, (4.10) |
2i−1Tµp +1 |
|
2i Tµp(2i−1Tµp +1) |
||||||
pi |
opi |
|
oi |
|
|
|||
из которого легко можно определить передаточную функцию регулятора i-го контура регулирования, обеспечивающего настройку контура регулирования на модульный оптимум:
W |
(p) = |
koi−1 |
|
1 |
|
. |
(4.11) |
|
2i T pk |
|
|
W |
(p) |
||||
pi |
|
oi |
|
|
|
|||
|
|
µ |
|
opi |
|
|
|
|
Таким образом, из (4.11) видно, что передаточная функция и свойства регулятора определяются передаточной функцией объекта
регулирования Wopi (p) . Например, если передаточная функция объекта
регулирования будет представлена пропорциональным звеном, то в соответствии с (4.11) регулятор будет иметь передаточную функцию интегрального звена.
В передаточной функции (4.11) для первого контура регулирования (i=1) коэффициент обратной связи koi-1 =1.
ГЛАВА 5. СУЭП ПО СИСТЕМЕ ТП-Д С ПОДЧИНЕННЫМ РЕГУЛИРОВАНИЕМ КООРДИНАТ
В настоящее время наиболее распространенной системой электропривода постоянного тока является система тиристорный
115