Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
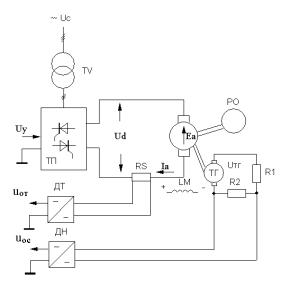
преобразователь - двигатель (ТП-Д) с двигателем постоянного тока независимого возбуждения, принципиальная электрическая схема силовой части которой представлена на рис.5.1. Входным управляющим
воздействием является напряжение управления Uу на входе ТП. Реализованы обратные связи по якорному току двигателя uот при помощи шунта RS в якорной цепи и датчика тока ДТ и по скорости вращения электродвигателя uос при помощи тахогенератора ТГ , делителя напряжения R1,R2 и датчика напряжения ДН .
Рис.5.1 Принципиальная электрическая схема системы ТП-Д
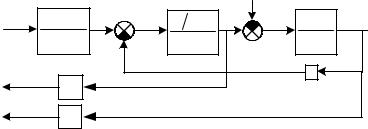
Данной принципиальной электрической схеме (рис.5.1) соответствует структурная схема, приведенная на рис.5.2. В соответствии с построением СПРК в структурной схеме можно выделить две регулируемые координаты: ток якоря и скорость вращения электродвигателя, поэтому система управления должна иметь два контура регулирования – внутренний контур регулирования якорного тока и внешний контур регулирования скорости. Поскольку постоянная времени ТП не превышает 3…10 мс, то она будет являться минимальной постоянной времени в данной структурной схеме, а ТП будет фильтром для первого контура регулирования.
116
Рассмотрим реализацию контурных регуляторов для настройки |
||||||
системы управления электроприводом на модульный оптимум. |
||||||
U |
kп |
E |
1 Rэ |
Ia |
Iс |
Rэ / с |
у |
|
|
||||
|
d |
|
|
|||
|
Тµ р +1 |
|
Т р +1 |
|
|
Т р |
|
|
|
э |
|
|
м |
uот |
|
i =1 |
Еа |
|
|
с |
kот |
|
|
|
|||
uос |
|
|
i = 2 |
|
||
kос |
|
|
|
|||
|
|
|
|
|
|
|
Рис.5.2. Структурная схема силовой части системы ТП-Д |
||||||
В соответствии с построением систем подчиненного регулирования координат, первым настраивается внутренний контур регулирования, в данном случае это контур регулирования якорного тока.
5.1. Настройка контура регулирования тока якоря
Наиболее общей функцией электропривода является регулирование его тока или пропорционального ему момента у двигателя независимого возбуждения. Контур регулирования тока (момента), как внутренний контур СПРК, определяет настройку и динамические показатели остальных внешних контуров регулирования электропривода.
При реализации регулятора тока (РТ) принимают следующие допущения:
•внутренняя обратная связь по ЭДС двигателя не оказывает влияния на работу токового контура;
•режим прерывистого тока отсутствует;
•параметры якорной цепи во время работы остаются неизменными;
•не учитывается ввиду своей малости инерционность датчика
тока.
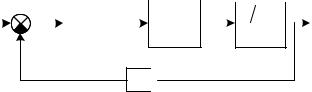
Всоответствии с принятыми допущениями структурная схема контура регулирования якорного тока (момента) примет вид, представленный на рис. 5.3.
117
uзт |
∆uт |
|
Uу |
|
|
|
E |
|
|
|
|
|
I |
|
|||
|
|
kп |
|
|
|
|
|
|
|
||||||||
|
|
d |
1 Rэ |
a |
|||||||||||||
Wрт (p) |
|
|
|||||||||||||||
|
|
|
|
|
|
|
Тµр +1 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Тэр +1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
uот
kот 
Рис.5.3. Структурная схема контура регулирования якорного тока
В контур регулирования якорного тока (момента) входят: регулятор тока (РТ), передаточную функцию которого следует
определить, ТП с минимальной постоянной времени Tµ , якорная цепь
электропривода, цепь обратной связи, состоящая из шунта и датчика тока. Коэффициент пропорциональности между величиной якорного тока и напряжением обратной связи по току (или напряжением задания якорного тока) называется коэффициентом обратной связи по току
koт и рассчитывается по формуле:
kот = uзтmax = uотmax |
= |
(8 -10)В |
(5.1) |
|
Imax |
Imax |
|
λIндв |
|
где λ – перегрузочная способность двигателя по току, Iндв – номинальный ток двигателя, А.
Настройка контура регулирования якорного тока на модульный оптимум для получения оптимальных переходных процессов заключается в определении передаточной функции РТ и реализации регулятора в системе управления электроприводом.
Передаточная функция разомкнутого контура регулирования якорного тока (рис.5.3), когда выходной координатой является напряжение обратной связи по току якоря, имеет вид:
W |
(p) = uот (p) |
= W (p) |
kп |
|
1/ Rэ |
|
|
k |
от |
. |
(5.2) |
|||
T p +1 T p + |
1 |
|||||||||||||
разт |
u |
зт |
(p) |
рт |
|
|
|
|||||||
|
|
|
|
µ |
|
э |
|
|
|
|
|
|
||
|
|
|
|
118 |
|
|
|
|
|
|
|
|
|
|

Для настройки контура регулирования якорного тока на МО необходимо, чтобы передаточная функция разомкнутого контура регулирования тока равнялась передаточной функции разомкнутой системы, настроенной на МО. Поэтому аналогично (4.10) легко получить следующее равенство, где в передаточной функции системы, настроенной на МО, отсутствует единичная обратная связь (т.е. система разомкнута):
W (p) |
kп |
|
1/ Rэ |
|
k |
|
= |
1 |
. |
(5.3) |
T p +1 T p +1 |
|
2T p(T p +1) |
||||||||
рт |
|
от |
|
|
|
|||||
|
µ |
|
э |
|
|
|
µ µ |
|
|
|
Из (5.3) можно определить передаточную функцию РТ, обеспечивающую настройку контура регулирования якорного тока на МО:
W |
|
(p) = |
|
|
Tэp +1 |
|
= |
Tэp +1 = |
Tэ |
+ |
1 |
= |
||
рт |
|
|
|
|
kпkот |
p |
T p |
T |
T p |
|
||||
|
|
|
|
|
2Tµ Rэ |
рт |
|
рт |
рт |
(5.4) |
||||
|
|
|
|
|
|
|
|
|
|
|
||||
= kрт + |
|
1 |
. |
|
|
|
|
|
|
|
|
|||
Tртp |
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Из (5.4) видно, что РТ является пропорционально – |
||||||||||||||
интегральным |
|
(ПИ) |
|
регулятором, |
с |
коэффициентом |
усиления |
|||||||
kрт = Tэ Tрт |
и постоянной времени |
интегрирования |
регулятора |
|||||||||||
тока Tрт = 2Tµkпkот  Rэ .
Rэ .
Определим передаточную функцию замкнутого токового контура Wзамт (p) , настроенного на модульный оптимум, когда выходной
координатой является якорный ток Ia , а входной – напряжение задания величины якорного тока uзт :
119

W (p) = |
Ia (p) |
= |
|
|
|
|
|
1 |
|
|
|
|
= |
|
|
||||||||
uзт (p) |
|
|
|
|
|
1 |
|
|
|
|
|
||||||||||||
|
замт |
|
|
|
|
|
|
|
|
|
|
|
+kот |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kп |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
Wрт (p) |
|
|
1/ Rэ |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
Tµp +1 Tэp +1 |
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
1 kот |
(5.5) |
||
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
. |
|
||||
|
|
|
|
1 |
|
|
|
|
|
|
|
+kот |
|
2Tµp(Tµp +1) +1 |
|
||||||||
|
|
Тэp +1 |
|
|
|
kп |
|
1/R |
э |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
kпkот |
|
|
T p +1 |
Т |
p +1 |
|
|
|
|
|
|
|
||||||||
|
|
2Тµ |
|
|
p µ |
|
|
|
э |
|
|
|
|
|
|
|
|
|
|
|
|
||
Rэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Как видно из последнего выражения (5.5), динамические свойства замкнутого контура регулирования якорного тока определяются только
минимальной постоянной времени системы регулирования Tµ , и не
зависят от величины постоянной времени Tэ , говорят, что произошла «компенсация» большой постоянной времени. «Компенсация» постоянной времени Tэ осуществляется форсировкой выходного
напряжения ТП, когда к якорной цепи прикладывается повышенное напряжение для обеспечения переходной функции с перерегулированием
4,3% и временем нарастания, равным 4,7 Tµ (таблица 1 для i=1).
Рассмотрим реализацию регулятора тока якоря на аналоговом операционном усилителе (приложение В). Принципиальная электрическая схема регулятора тока приведена на рис. 5.4. Регулятор имеет два входа, на первый подается напряжение задания величины
якорного тока uзт , например, положительной полярности, тогда на
второй вход для обеспечения отрицательной обратной связи по регулируемой координате должно подаваться напряжение обратной связи
по величине якорного тока uoт отрицательной полярности. При данной полярности входных напряжений на выходе РТ будет сформировано напряжение управления ТП отрицательной полярности - Uу (для условного направления вращения «назад»).
120