Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
уменьшение просадки скорости, т.е. приводит к повышению жесткости механической характеристики электропривода.
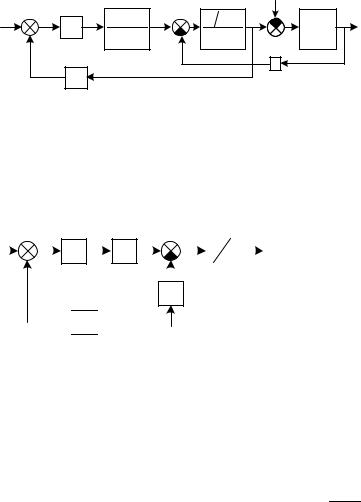
Структурная схема СУЭП с положительной обратной связью по току якоря двигателя приведена на рис. 3.16.
Uз |
|
Рег |
ТП |
|
ЯЦ |
Ia |
∆u |
Uу |
kп |
Ed |
1 Rэ |
||
|
|
kр |
Тµр +1 |
|
Тэр +1 |
|
|
Uот |
|
|
|
||
|
ДТ |
|
|
Еа |
|
|
|
|
kот |
|
|
|
|
Ic |
ЭМП |
|
Rэ / с ω |
|
Тмр |
с |
|
Рис. 3.16. Структурная схема СУЭП с положительной обратной связью по току
Для анализа статических характеристик электропривода в системе с положительной обратной связью по току воспользуемся вырожденной структурной схемой системы регулирования (рис. 3.17).
Uз Σ1 ∆u |
|
Uу |
|
Ed Σ2 Еа |
|
ω |
||||||||||
kр |
kп |
1c |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Uот |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Rэ |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
 kот
kот  Ic
Ic
Рис. 3.17. Вырожденная структурная схема СУЭП с положительной обратной связью по току
Аналогично выполняемому ранее, выведем передаточные коэффициенты по управляющему и возмущающему воздействиям. Приравняв нулю возмущающее воздействие (Iс =0), по схеме рис.3.17 легко можно получить выражение для передаточного коэффициента по управляющему воздействию (при этом видно, что при токе равном нулю,
система регулирования оказывается разомкнутой): KU = ω0 = kрkп ,
Uз с
96
откуда можно получить выражение для скорости идеального холостого хода, задаваемой величиной Uз на входе регулятора:
ω = U |
|
kрkп |
. |
(3.15) |
|
|
|||
0 |
з с |
|
||
Приравняв нулю задающее воздействие (Uз = 0), по структурной схеме рис. 3.17 можно получить передаточный коэффициент по возмущающему воздействию, который состоит из двух составляющих, т.к. возмущение прикладывается к двум точкам приложения Σ1 и Σ2 с различными знаками:
|
∆ω |
|
|
kрkпkот |
|
R |
|
Kf = |
зам = Kf1 |
− Kf 2 |
= |
|
− |
|
э . (3.16) |
с |
|
||||||
|
Ic |
|
|
|
с |
||
С учетом (3.15) и (3.16) уравнение электромеханической характеристики электропривода в данной СУЭП примет вид:
ω = ω − ∆ω |
|
= U |
|
kрkп |
− I |
|
(Rэ − kрkпkот ) |
(3.17). |
|
|
|
|
с |
||||
0 |
зам |
|
з с |
c |
|
|||
Из последнего уравнения видно, что применение положительной обратной связи по току, приводит к снижению статической просадки скорости в замкнутой СУЭП, т.е. к увеличению жесткости электромеханической характеристики (характеристика 2 на рис.3.18).
Если обеспечить равенство kрkпkот = Rэ , то получится
абсолютно жесткая электромеханическая характеристика (характеристика 3 на рис.3.18). Коэффициент обратной связи по току, обеспечивающий абсолютно жесткую электромеханическую характеристику, называют граничным, его величина равна:
kотгр = |
Rэ |
. |
(3.18) |
|
|||
|
kрkп |
|
|
97
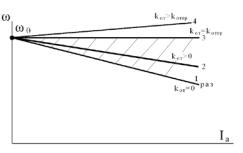
Если величину коэффициента kот установить большей, чем kотгр (kот > kотгр), то статическая просадка скорости станет противоположного знака и электромеханическая характеристика примет вид характеристики 4 на рис.3.18, что соответствует неустойчивой работе электропривода, т.е. коэффициент kотгр соответствует граничному положению электропривода между устойчивым и неустойчивым состояниями.
Рис. 3.18. Электромеханические характеристикиСУЭП с положительной обратной связью по току
Как видно из (3.18) абсолютно жесткую электромеханическую характеристику в данной СУЭП можно получить при вполне конкретных
значениях коэффициентов kр и kот (т.е. kрkпkот не стремятся к
бесконечности). При этом положительная обратная связь по току вызывает увеличение напряжения ЭДС ТП пропорционально увеличению падения напряжения IRа, поэтому положительную обратную связь по току иногда называют в технической литературе «IR – компенсацией».
Положительная обратная связь по току, обеспечивающая устойчивую работу в статическом режиме, в динамике может привести к неустойчивой работе электропривода. Например, увеличение по какойлибо причине якорного тока, приведет к увеличению напряжения обратной связи на входе регулятора, увеличению результирующего сигнала на выходе регулятора, увеличению выходного напряжения ТП, дальнейшему увеличению якорного тока и т.д., вызывая лавинообразное возрастание якорного тока.
Поэтому на практике положительную обратную связь по току якоря применяют вместе с отрицательной обратной связью по скорости (напряжению). Отрицательная обратная связь по скорости (напряжению) не позволяет неограниченно увеличиваться якорному току, т.к. влияние отрицательной обратной связи сильнее, чем положительной. Например, для получения жесткости естественной электромеханической характеристики в СУЭП с комбинацией отрицательной обратной связи по
98

напряжению и положительной обратной связи по току якоря на долю повышения жесткости электромеханической характеристики за счет отрицательной обратной связи по напряжению приходится (70-80)%, а на долю положительной обратной связи по току якоря - оставшиеся (3020)%.
Пример 3. Для системы регулирования с параметрами Кп = 25, Кр=1, Rэ=0.25 Ом, Ra=0.15 Ом определить величину коэффициента положительной обратной связи по току якоря kот для обеспечения жесткости естественной электромеханической характеристики.
Т.к. жесткости естественной электромеханической характеристики соответствует статическая просадка скорости, равная Δωзам = IcRa/c, то на основании (3.16) и (3.17) можно составить уравнение Rэ-kрkпkот=Ra, откуда определяется необходимая величина коэффициента: kот=(Rэ-Ra)/kрkп=Rп/ kрkп=(0.25-0.15)/(25*1)=0.004 В/А.
Контрольные вопросы:
1.Как в электроприводе реализуется обратная связь по току якорной цепи?
2.Что определяет величину скорости вращения двигателя в установившемся режиме работы при постоянном напряжении задания на входе регулятора?
3.Почему в данной СУЭП возможно получение абсолютно жесткой механической характеристики электропривода (для ответа используйте внешние характеристики ТП)?
4.С какой целью в цепи обратной связи по току включают датчик
тока?
5.С какой целью в электроприводах применяют положительную обратную связь по току якоря?
6.Какое условие должно выполняться в СУЭП с положительной обратной связью по току для получения абсолютно жесткой механической характеристики двигателя?
7.Как определить величину граничного коэффициента положительной обратной связи по току?
8.Как определить величину коэффициента обратной связи по току, чтобы обеспечить жесткость естественной характеристики?
9.Почему положительную обратную связь по току применяют только в комбинации с отрицательными обратными связями?
10.Как получить уравнение внешней характеристики ТП в данной
СУЭП?
99
3.5. СУЭП с задержанной отрицательной обратной связью по току якоря
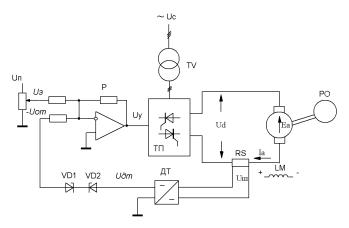
Задержанная обратная связь - это такая обратная связь, которая начинает действовать только с определенного уровня регулируемого параметра. На рис. 3.19 показана принципиальная электрическая схема СУЭП с задержанной отрицательной обратной связью по току, в которой обратная связь с выхода датчика тока подключается на вход регулятора через два встречно включенных стабилитрона VD1 и VD2 (один из которых работает при одном направлении якорного тока, а другой при противоположном).
Рис. 3.19. Принципиальная электрическая схема СУЭП с задержанной отрицательной обратной связью по току якоря
Поэтому обратная отрицательная связь по току появится на входе регулятора лишь тогда, когда выходное напряжение датчика тока превысит напряжение стабилизации (пробоя) стабилитрона. При этом один из стабилитронов работает в режиме стабилизации, а другой – в режиме диода.
Таким образом, обратная связь по току вступает в работу, когда ток якоря превысит некоторое значение, которое называют током отсечки. Следовательно, в работе данной системы регулирования можно выделить два режима работы, первый – когда ток якоря меньше тока отсечки и напряжение обратной связи равно нулю (система разомкнута), второй режим - когда ток якоря превышает ток отсечки и на вход
100