Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
∆ωзам = Ic |
Rэ / c |
= |
|
1+ kрkпkос / c |
|||
∆ωраз |
(3.13) |
|
|
|
|
||
1+ Kразс |
|
||
Из (3.13) получается соотношение для расчета коэффициента регулятора (коэффициента обратной связи по скорости) при заданном коэффициенте обратной связи по скорости (коэффициенте регулятора) для обеспечения требуемой просадки скорости в замкнутой системе регулирования с отрицательной обратной связью по скорости двигателя:
∆ωзам |
= |
|
1 |
|
|
|
. |
(3.14) |
∆ω |
1+ k |
k |
k |
ос |
/ c |
|||
раз |
|
р |
п |
|
|
|
|
Контрольные вопросы:
1.Как получается вырожденная структурная схема СУЭП с отрицательной обратной связью по напряжению?
2.На основании вырожденной структурной схемы, получите выражение для определения скорости идеального холостого хода.
3.На основании вырожденной структурной схемы, получите выражение для определения статической просадки скорости.
4.Что определяет величина напряжения задания на входе регулятора?
5.От чего зависит, с какой скоростью будет вращаться двигатель в данной СУЭП?
6.Нарисуйте вырожденную структурную схему данной СУЭП, когда выходной координатой будет не скорость вращения двигателя, а напряжение ТП.
7.На основании вырожденной структурной схемы, получите выражение для определения напряжения холостого хода ТП в данной СУЭП
8.На основании вырожденной структурной схемы, получите выражение для определения падения напряжения в ТП для данной СУЭП
91
9.Как влияет величина коэффициента усиления регулятора на жесткость механических характеристик данной СУЭП?
10.Что произойдет с жесткостью механических характеристик, если увеличить значение коэффициента обратной связи по напряжению?
11.Объясните, почему в данной СУЭП невозможно получить жесткость механической характеристики выше естественной (свяжите ответ с внешней характеристикой ТП)?
12.Поясните, как изменится работа двигателя при постоянной величине момента нагрузки, если произойдет обрыв обратной связи по напряжению (используйте для ответа электромеханические характеристики привода).
13.Каким образом можно получить в данной СУЭП жесткость естественной характеристики при реальных значениях коэффициентов регулятора и обратной связи по напряжению?
14.Какие элементы необходимы для реализации обратной связи по скорости двигателя?
15.Как правильно рассчитать коэффициент обратной связи по
скорости?
16.Объясните влияние отрицательной обратной связи по скорости на вид механических характеристик.
17.Как рассчитать необходимую величину коэффициента усиления регулятора для получения заданной жесткости механической характеристики?
18.Как рассчитать необходимую величину коэффициента обратной связи по скорости для получения заданной жесткости механической характеристики?
19.Составьте структурную схему СУЭП с отрицательной обратной связью по скорости относительно выходного напряжения ТП и выведите уравнение внешней характеристики ТП.
20.Как должно изменяться напряжение ТП, чтобы обеспечить абсолютно жесткую механическую характеристику в СУЭП с обратной связью по скорости?
3.3.1. Статические характеристики СУЭП с отрицательной обратной связью по скорости
Проанализируем возможности СУЭП с отрицательной обратной связью по скорости при реализации электромеханических характеристик электропривода с заданной жесткостью. Для этого воспользуемся уравнениями электромеханической характеристики привода и внешней
92
характеристики ТП в замкнутой СУЭП, полученную на основании вырожденной структурной схемы СУЭП:
Udзам = Uз |
kрkп |
− Ia |
Rп |
+ Ia |
Ra kрkпkос / c |
1+ kрkпkос / c |
1+ kрkпkос / c |
1+ kрkпkос / c |
Как видно из последнего уравнения на величину выпрямленного напряжения ТП в данной системе управления влияют две составляющие: первая (со знаком «-») - падение напряжения во внутреннем сопротивлении ТП, и вторая составляющая (со знаком «+») – получающаяся за счет действия отрицательной обратной связи по скорости.
Как видно из (3.12) напряжение задания на входе регулятора задает только величину скорости идеального холостого хода электропривода, т.е. одну точку электромеханической характеристики. Скорость, с которой будет вращаться двигатель, будет зависеть от нагрузки двигателя, т.е. статического момента (тока). Как видно из (3.13) на величину просадки скорости в замкнутой системе регулирования влияют изменяемые параметры: коэффициент усиления регулятора kр и коэффициент обратной связи по скорости kос. При увеличении любого из
этих коэффициентов ∆ωзам уменьшается, т.е. жесткость
электромеханической характеристики увеличивается, при этом изменяется и наклон внешней характеристики ТП (рис.3.14). Если выбрать kос так, чтобы выполнялось равенство Rп = Rakрkпkос/с, то в этом случае получается жесткость естественной механической характеристики при постоянном напряжении (характеристики 3 на рис.3.14).
При увеличении kр*kос→∞ просадка ∆ωзам → 0 , а внешняя характеристика ТП носит возрастающий характер, компенсируя падение
напряжения IcRa в якорной цепи двигателя (характеристики 4 на рис.3.14).
Следовательно, в пределе получается абсолютно жесткая электромеханическая характеристика. Таким образом, применение отрицательной обратной связи по скорости может обеспечить жесткость электромеханических характеристик от разомкнутой (при kос=0) до абсолютно жесткой (рис. 3.14). Получить абсолютно жесткую электромеханическую характеристику возможно при реальных значениях kр и kос, если применить ПИ – регулятор.
93
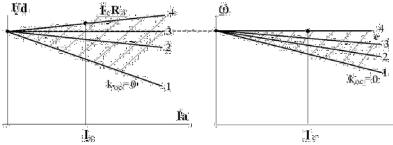
Рис.3.14. Внешние и электромеханические характеристики СУЭП с отрицательной обратной связью по скорости
На основании уравнения (3.14) можно реализовать заданную просадку ∆ωзам в системе с отрицательной обратной связью по
скорости выбором величины коэффициента усиления регулятора kр при известном kос, либо выбором kос при известном значении kр.
Пример 2. Для системы регулирования с параметрами Кп = 30, Кр=4, Δωзам/Δωраз = 0.6, с = 1.7 Вс определить вел ичину коэффициента обратной связи по скорости.
На основании (3.14) составляем равенство: 0.6(1 + КрКпКос/с) = 1, откуда получаем КрКпКос/с = (1 -0.6)/0.6 = 0,667, тогда коэффициент обратной связи по скорости будет равен: Кос=
0.667*с/(КпКр)=0.667*1.7/(30*4) = 0.0094 Вс.
3.4. СУЭП с положительной обратной связью по току якоря
Рассмотрим возможность применения положительной обратной связи по якорному току двигателя для получения заданной жесткости механической характеристики в замкнутых системах регулирования. Принципиальная электрическая схема СУЭП с положительной обратной связью по току якоря двигателя показана на рис. 3.15.
Для реализации обратной связи по току двигателя в якорной цепи установлен измерительный шунт RS, с которого снимается падение напряжения, пропорциональное величине тока якорной цепи. Так как падение напряжения на шунте невелико (стандартная величина падения напряжения равна 75 или 150 мВ), то для получения напряжения обратной связи по току Uот, соизмеримого по величине с напряжением задания Uз, применяют датчик тока ДТ, который усиливает входное напряжение (падение напряжения на шунте) до величины (8÷10) В, а
94
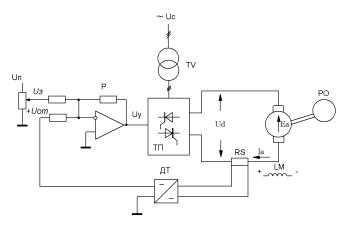
также обеспечивает гальваническую развязку силовых цепей от цепей управления.
Рис. 3.15. Принципиальная электрическая схема СУЭП с положительной обратной связью по якорному току
Для масштабирования тока якоря двигателя и напряжения обратной связи по току вводят коэффициент обратной связи по току,
который ставит в соответствие величине якорного тока напряжение обратной связи по току, и определяется равенством:
kот=Uотmax/Imax,
где Uотmax = (8…10) В – максимальная величина напряжения обратной связи по току,
Imax – максимальная величина тока якоря с учетом перегрузочной способности электродвигателя.
В данной системе регулирования на вход регулятора подается положительная обратная связь, т.е. полярность сигналов Uз и Uот одинаковая. Поэтому, при возрастании величины якорного тока двигателя, вызванного, например, увеличением нагрузки на валу двигателя, пропорционально величине якорного тока увеличивается падение напряжения на шунте RS и увеличивается напряжение обратной связи Uот на входе регулятора. Это приводит к увеличению напряжения UУ на выходе регулятора и увеличению ЭДС, а, следовательно, и напряжения тиристорного преобразователя, что обеспечивает
95