Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
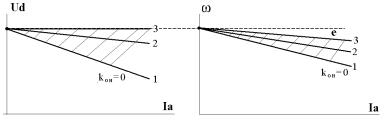
характеристики и уменьшению падения напряжения в ТП (характеристики 2 на рис. 3.8). При настройке системы регулирования изменяемыми параметрами могут быть коэффициенты передачи (усиления) регулятора и обратной связи по напряжению. Увеличение
либо kр либо kон ведет к дальнейшему уменьшению ∆ωзам и ∆Uпзам .
При kр*kон→∞ ∆ωзам → IcRa / c , а ∆Uпзам → 0, откуда видно, что предельная внешняя характеристика ТП будет абсолютно жесткой и ей соответствует естественная электромеханическая характеристика электропривода (характеристики 3 на рис.3.8). Таким образом, диапазон электромеханических характеристик в системе с отрицательной обратной связью по напряжению лежит в пределах от разомкнутой до
естественной.
Рис. 3.8. Внешние и электромеханические характеристики в системе регулирования с отрицательной обратной связью по напряжению
Из теории автоматического регулирования известно, что система регулирования будет астатической, если в канале регулирования имеется интегральная составляющая. Следовательно, применение пропорционально – интегрального (ПИ) регулятора позволит получить жесткость естественной электромеханической характеристики при реальных значениях kр и kон.
Несколько преобразовав выражение (3.8) легко получить следующее равенство:
∆ωзам = |
1+ k |
рkпkонRa / Rэ |
, |
(3.10) |
|||
1 |
|
||||||
∆ω |
+ k |
k |
k |
он |
|
||
раз |
|
р |
п |
|
|
||
86
на основании которого можно настроить систему регулирования для получения заданной жесткости характеристики, т.е. заданного
отношения ∆ωзам / ∆ωраз , для которого при заданном значении kон
можно рассчитать требуемое значение kр либо при заданном значении kр рассчитать требуемое значение kон.
Пример 2. Для системы регулирования с параметрами Кп = 50, Кон
= 0.016, Ra = 0.0695 Ом, Rэ = 0.133 Ом, Δωзам/Δωраз = 0.72, определить величину коэффициента усиления регулятора Кр.
На основании (3.10) составляем равенство: 0.72(1 + КрКпКон) = 1 +
КрКпКонRa/Rэ, откуда получаем (0.72 - Ra/Rэ) КрКпКон = 1 - 0.72, тогда коэффициент усиления регулятора будет равен: Кр= (1 – 0.72)/ КпКон(0.72
- Ra/Rэ) = 0.28/(50*0.016(0.72 – 0.0695/0.133)) = 0.28/(50*0.016*(0.72- 0.52) = 0.28/0.16 = 1.75.
3.3. СУЭП с отрицательной обратной связью по скорости вращения электродвигателя
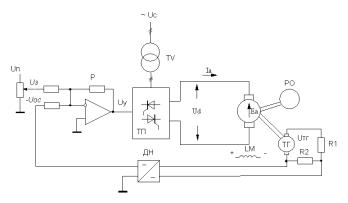
Принципиальная электрическая схема СУЭП с отрицательной обратной связью по скорости вращения электродвигателя показана на рис. 3.9.
Рис.3.9. Принципиальная электрическая схема СУЭП с отрицательной обратной связью по скорости вращения двигателя
Для реализации обратной связи по скорости вращения двигателя применяют тахогенератор ТГ, сочлененный с валом двигателя, делитель напряжения R1, R2, и датчик напряжения ДН. Датчик напряжения служит для гальванической развязки силовой цепи ТГ и цепей управления, а также для повышения помехозащищенности системы
87
регулирования, т.к. разрывается цепь прохождения помехи из силовой цепи ТГ на вход регулятора. Делитель напряжения обеспечивает максимальное падение напряжения на резисторе R2 (8÷10 В) при максимальной скорости вращения двигателя. Для масштабирования скорости вращения двигателя и напряжения обратной связи по скорости вводят коэффициент обратной связи по скорости, который определяют по выражению:
kос=Uосmax/ωmax,
где Uосmax = (8…10)В – максимальное напряжение обратной связи по скорости;
ωmax – максимальная скорость вращения двигателя, исходя из требований технологического процесса (например, скорость идеального холостого хода при номинальном напряжении).
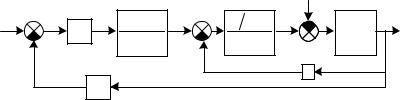
На основании принципиальной электрической схемы (рис.3.9) может быть легко составлена структурная схема СУЭП с отрицательной обратной связью по скорости двигателя, которая представлена на рис.
3.10.
|
|
Рег |
|
ТП |
|
ЯЦ |
Ic |
ЭМП |
Uз |
∆u |
kр |
Uу |
kп |
Ed |
1 Rэ |
Ia |
Rэ / с ω |
|
||||||||
|
Uос |
|
Тµр +1 |
|
Тэр +1 |
|
Тмр |
|
|
|
|
|
|
||||
|
ТГ +Дел |
|
Еа |
с |
|
|||
|
|
|
|
|||||
|
|
|
kос |
|
|
|
|
|
Рис. 3.10. Структурная схема СУЭП с отрицательной обратной связью по скорости |
||||||||
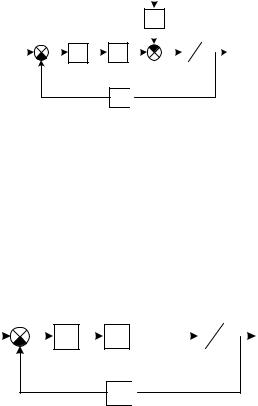
Для анализа статических характеристик СУЭП воспользуемся вырожденной структурной схемой системы регулирования, полученной из структурной схемы рис. 3.10 при p=0 и представленной на рис. 3.11.
88
|
|
|
|
|
|
|
|
|
|
|
Ic |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Rэ |
|
|
|
|||
Uз Σ1 ∆u |
|
Uу |
|
Ed |
|
|
Еа |
|
|
ω |
||||||
kр |
kп |
|
|
1 |
c |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Σ2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
Uос |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
kос
Рис.3.11. Вырожденная структурная схема СУЭП с отрицательной обратной связью по скорости вращения двигателя
Из структурной схемы рис.3.11 видно, что задающим (управляющим) воздействием является напряжение задания на входе регулятора Uз, возмущающим воздействием – статический ток (момент) двигателя (нагрузка на валу).
Для определения коэффициента передачи по управляющему воздействию принимаем возмущающее воздействие равным нулю (Iс =0), тогда получается структурная схема системы регулирования по управляющему воздействию (рис. 3.12).
U |
з |
Σ1 |
∆u |
|
U |
у |
|
Ed = Ea |
|
|
ω |
||||
|
|
|
|
||||||||||||
|
|
kр |
|
kп |
|
1c |
0 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Uос
kос
Рис.3.12. Вырожденная структурная схема СУЭП по управляющему воздействию
Коэффициент передачи по управляющему воздействию на основании схемы рис. 3.12 равен:
KU = |
ω0зам = |
kрkп/ c |
= |
|
kрkп/ c |
(3.11) |
|
Uз |
1+ kрkпkос / c |
|
1+ Kразс |
|
|
где Kразс - коэффициент разомкнутой системы управления с обратной связью по скорости.
89
Из (3.11) получается выражение для скорости идеального холостого хода в замкнутой СУЭП:
|
kрkп/ c |
|
kрkп/ c |
|
||
ω0зам = Uз * KU = Uз 1+ kрkпkос / c |
= Uз 1 |
+ Kразс . |
(3.12) |
|||
|
|
|
|
|
|
|
Для определения коэффициента передачи по возмущающему воздействию воспользуемся вырожденной структурной схемой системы регулирования, представленной на рис. 3.13. После преобразования данной структурной схемы получается выражение для коэффициента передачи по возмущающему воздействию:
Kf = |
∆ωзам = |
|
|
|
|
|
Rэ / c |
|
, |
||||||||||
1+ kрkпkос / c |
|||||||||||||||||||
|
|
|
Ic |
|
|
|
|
|
|||||||||||
Ic |
|
|
|
Σ2 Е |
|
|
|
|
|
∆ω |
|
||||||||
Rэ |
|
а |
|
1c |
|
||||||||||||||
|
|
k |
|
п |
Ed |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
kос |
|
|
|||||
|
|
|
|
|
|
|
Uу |
|
|
Uос |
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
∆u |
||||||
|
|
|
|
|
|
|
|
|
kр |
Σ1 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Рис.3.13. Вырожденная структурная схема СУЭП по возмущающему воздействию
из которого можно получить уравнение для статической просадки скорости в замкнутой системе регулирования с отрицательной обратной связью по скорости:
90