Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
2.2.2. Двигатель постоянного тока независимоговозбуждения как элемент системы регулирования
Рассмотрим динамические свойства двигателя постоянного тока независимого возбуждения в системе тиристорный преобразователь – двигатель (ТП-Д), для чего определим передаточные функции двигателя по управляющему и возмущающему воздействиям и составим его структурную схему. В качестве выходной координаты электродвигателя принимается скорость его вращения, тогда входное управляющее воздействие - это выпрямленная ЭДС ТП, а возмущающее воздействие – момент (ток) нагрузки на валу двигателя.
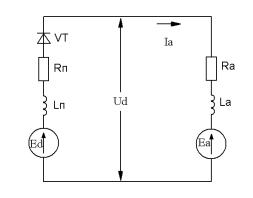
Эквивалентная схема включения электродвигателя постоянного тока независимого возбуждения по системе ТП-Д представлена на рис.2.6.
Рис.2.6. Эквивалентная схема системы ТП-Д
Для данной схемы справедливы следующие уравнения равновесия электрической цепи, представленные в операторной форме записи:
Ud (p) = Ed (p) − Ia (p)Rп − LпIa (p)p ,
Ud (p) = Ea (p) + Ia (p)Ra + LaIa (p)p
Ed (p) = Ea (p) + Ia (p)(Ra + Rп ) + (La + Lп )Ia (p)p
= Ea (p) + Ia (p)Rэ + LэIa (p)p
где Ud – среднее значение выпрямленного напряжения ТП, В; Ed – среднее значение выпрямленной ЭДС ТП, В;
66

Rп – активное сопротивление ТП, Ом; Lп – индуктивность ТП, Гн;
Ea – ЭДС двигателя, В;
Ra – активное сопротивление якоря двигателя, Ом; La – индуктивность якоря двигателя, Гн;
Rэ= Ra + Rп – эквивалентное активное сопротивление контура протекания якорного тока, Ом;
Lэ= La + Lп – эквивалентная индуктивность контура протекания якорного тока, Гн;
p=d/dt – оператор дифференцирования.
Эквивалентное сопротивление якорной цепи системы ТП-Д можно определить по формуле:
Rэ =1,1Ra + aв (Rт + m |
Xт |
) , |
(2.27) |
|
|||
|
2π |
|
|
где Rа = β *(rяо+rдп+rко) – активное сопротивление якорной цепи двигателя, Ом;
β = 1,24 – 1,32 –коэффициент приведения сопротивления к рабочей температуре двигателя;
rяо, rдп, rко - активное сопротивление якорной обмотки, обмотки
дополнительных полюсов и компенсационной при температуре (20 –
25)оС, Ом;
aв – схемный коэффициент (aв = 2 для мостовой схемы выпрямления aв = 1 для нулевой);
Rт = Ркз/(3*(I2фн)2) – активное приведенное сопротивление одной фазы питающего трансформатора (или токоограничивающего реактора), Ом;
Ркз – потери короткого замыкания трансформатора, Вт; I2фн – номинальный фазный ток трансформатора, А;
Xт = 
 Z2т − R2т – индуктивное приведенное сопротивление
Z2т − R2т – индуктивное приведенное сопротивление
одной фазы питающего трансформатора (или токоограничивающего реактора), Ом;
Zт = (е к%*U2фн/(100* I2фн) – полное приведенное сопротивление одной фазы питающего трансформатора, Ом;
67
ек% - ЭДС короткого замыкания трансформатора, %;
U2фн – номинальное вторичное фазное напряжение питающего трансформатора, В.
Эквивалентная индуктивность якорной цепи системы ТП – Д определяется по формуле:
Lэ = La + aвLт , |
(2.28) |
где La= KL*Uн/(рп* Iн*ωн) – индуктивность якорной цепи двигателя, Гн;
KL – конструктивный коэффициент; для компенсированных машин принимается (0,1…0,25), для некомпенсированных – (0,5…0,6).
рп – число пар главных полюсов;
Uн, Iн ,ωн – номинальные напряжение, ток и частота вращения двигателя, соответственно;
Lт = Xт/(2*π*fс) – индуктивность трансформатора (или токоограничивающего реактора), при номинальной частоте питающей сети fс, Гн.
Если в якорной цепи имеется сглаживающий дроссель, то его параметры включают в параметры Rп и Lп ТП.
Если за выходную координату принять якорный ток Xвых(p)=Ia(p), а за входную - разность ЭДС ТП и двигателя Xвх(p) = Ed(p) - Ea(p), то передаточная функция якорной цепи двигателя в системе ТП – Д получится:
W (p) = Xвых (p) = |
|
Ia (p) |
= |
1/ R э |
|
, |
(2.29) |
||
|
|
|
|
||||||
яц |
|
Xвх (p) Ed (p) − Ea (p) |
|
Tэ p + |
1 |
|
|
||
|
|
|
|
|
|||||
где T = |
Lэ |
- эквивалентная |
электромагнитная |
|
постоянная |
||||
|
|
||||||||
э |
Rэ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
времени якорной цепи, с.
Структурная схема якорной цепи двигателя представлена на рис.2.7,а. Как видно из последнего выражения, якорная цепь двигателя представляет собой апериодическое (инерционное) звено с постоянной
68
времени Tэ и коэффициентом передачи 1/ Rэ и обладает всеми свойствами и характеристиками этого звена.
Связь между моментом (током) двигателя и его скоростью описывается основным уравнением движения электропривода в
операторной форме записи: |
|
M(p) − Mс (p) = JΣω(p)p , |
(2.30) |
где M = сIa - электромагнитный момент двигателя, Нм;
с = kФн - постоянная двигателя, Вс;
Mс - статический момент двигателя (момент нагрузки), Нм;
JΣ - приведенный суммарный момент инерции, кГм2; ω - частота (скорость) вращения двигателя, 1/с.
Запишем основное уравнение двигателя через токи, поскольку при постоянном магнитном потоке момент прямо пропорционален величине якорного тока, которую, в отличие от момента, можно легко измерить (или заосциллографировать):
Ia (p) − Iс (p) = |
JΣ |
ω(p)p ,. |
(2.31) |
|
|||
|
с |
|
|
Выполним некоторые преобразования в последнем уравнении:
I |
(p) − I |
(p) = |
JΣ |
Rэ |
с |
ω(p)p = |
JΣRэ |
|
с |
ω(p)p = T |
с |
|
ω(p)p ,гд |
|
|
|
с2 |
|
Rэ |
|
|
||||||||
a |
с |
|
с2 |
с c Rэ |
|
|
м R |
э |
||||||
|
Tм = |
|
|
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
JΣRэ |
- |
электромеханическая |
постоянная |
|
времени |
||||||
|
|
|
|
|||||||||||
электропривода, с.
Если за входное воздействие принять разность токов (динамический ток) Xвх(p)= Ia(p) - Ic(p), а за выходную координату – скорость двигателя Xвых(p)=ω(p), то в этом случае получается
69

передаточная функция электромеханического преобразователя тока в скорость (ЭМП):
|
Wэмп (p) = |
Xвых (p) |
= |
|
|
ω(p) |
= |
|
Rэ / c , |
(2.32) |
|||||||||||||
Ia (p) − Iс (p) |
|||||||||||||||||||||||
|
|
|
|
|
|
|
Xвх (p) |
|
|
|
|
Tмp |
|
||||||||||
т.е. ЭМП имеет свойства и характеристики интегрирующего звена |
|||||||||||||||||||||||
с постоянной времени интегрирования, равной Tи = Tмс . |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rэ |
|
||
|
Ed |
|
|
|
|
|
|
I |
|
|
Ia |
|
|
Ic |
|
|
|
|
ω |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
1 Rэ |
|
|
|
|
|
|
|
|
|
Rэ / с |
|
||||||||||
|
|
|
Ea |
|
Тэр +1 |
|
|
|
|
|
|
|
|
|
|
|
Тмр |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
а) |
|
|
|
|
|
|
|
|
|
|
б) |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Рис.2.7. Структурные схемы якорной цепи (а) и электромашинного преобразователя (б)
Структурная схема ЭМП представлена на рис.2.7,б. Объединив якорную цепь двигателя и электромеханический преобразователь можно получить структурную схему двигателя постоянного тока независимого возбуждения в системе ТП-Д, представленную на рис.2.8 а. В этой структурной схеме управляющим воздействием является ЭДС ТП, а возмущающим – ток нагрузки (ток статический).
На рис.2.8,б представлена также часто применяемая структурная схема двигателя, когда вместо координаты тока применяют координату момента.
Если возмущающее воздействие приравнять нулю (Iс = 0), то можно получить передаточную функцию двигателя по управляющему воздействию, когда выходной координатой является скорость идеального холостого хода, а входной – ЭДС ТП:
WU (p) = |
Xвых (p) |
= |
ω0 |
(p) |
= |
1/ c |
, |
(2.33) |
|||
X |
вх |
(p) |
E |
(p) |
T T p2 |
+ T p +1 |
|||||
|
|
|
|
d |
|
|
э м |
м |
|
|
|
|
|
|
|
|
|
70 |
|
|
|
|
|