Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
процесс регулирования одним числом, по величине которого можно было бы сделать определенные выводы о протекании переходного процесса в течение заданного интервала времени. Подобного вида оценки называются функционалами качества. Они записываются в виде
J0 = ∫T F{f(t)}dt . |
(2.12) |
0 |
|
Из этого выражения следует, что численное значение J0 определяется видом функции F, характером протекания во времени изучаемого параметра f(t) и интервалом времени протекания переходного процесса [0,T]. В качестве изучаемого параметра f(t) при определении интегральных оценок J0 обычно используется свободная составляющая переходного процесса, определяемая из соотношения
Xсв (t) = Xуст − X(t) , |
(2.13) |
где Xсв (t) - свободная составляющая;
Xуст - установившееся значение регулируемого параметра;
X(t) -переходный процесс изменения изучаемого параметра.
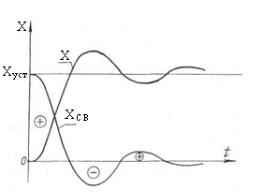
Свободная составляющая Xсв (t) по существу представляет собой ошибку системы регулирования во времени переходного процесса.
На рис.2.3 показан типичный график переходного процесса X(t) и
его свободной |
составляющей |
Xсв (t) . |
Для идеальной |
системы |
регулирования |
Xсв (t) = 0 , т.е. идеальная система представляет собой |
|||
пропорциональное динамическое |
звено |
с передаточной |
функцией |
|
WU (p) = K . Поэтому, чем меньше величина J0, тем ближе система регулирования к идеальной.
Наиболее часто используется простая квадратичная интегральная оценка свободной составляющей вида:
56
J2 = ∞∫Xсв2 (t)dt |
(2.14) |
0 |
|
Рис. 2.3. Графики переходного процесса X(t) и егоcвободной составляющей XСВ(t)
Чем меньше будет сумма абсолютных величин площадей между Xсв2 (t) и осью времени на рис.2.3, тем меньше будет величина J2 и тем
выше будет быстродействие системы регулирования. Однако при этом перерегулирование и число колебаний могут быть достаточно большими. То есть простая квадратичная оценка не несет в себе достаточной информации о качестве процесса регулирования.
Для того чтобы иметь более точную характеристику динамических свойств системы в подынтегральное выражение квадратичной оценки
вводят слагаемое (dXсв (t) / dt)2 , учитывающее квадрат скорости
протекания переходного процесса. В результате комбинированная квадратичная интегральная оценка будет определяться соотношением
|
|
J2K = ∞∫[Xсв2 |
(t) + τ2 (dXсв (t) / dt)2 ]dt |
(2.15) |
||
|
|
|
|
0 |
|
|
6 |
< τ < |
3 |
|
|
|
|
где |
tпп |
|
tпп |
- |
постоянная времени оптимальной |
|
|
|
|
||||
экспоненты;
tпп – требуемое время переходного процесса.
57
Последний интеграл (2.15) преобразуется к виду
∞
J2K = ∫[Xсв (t) + τ(dXсв (t) / dt)]2 dt + τXсв2 (0) . (2.16)
0
Комбинированная квадратичная оценка будет достигать минимального значения, равного J2K τXсв (0) , если переходный процесс будет близок к оптимальной экспоненте с постоянной времени τ.
2.1.3. Связь показателей качества регулирования с ЛАЧХ разомкнутого контура регулирования
Математические методы теории автоматического управления являются основой для синтеза замкнутых систем регулирования с заданными статическими и динамическими показателями.
Наиболее общие и широко используемые на практике представления о возможностях реализации заданных показателей регулирования дает известная из курса ТАУ связь основных показателей с логарифмической амплитудной частотной характеристикой (ЛАЧХ) разомкнутого контура регулирования
Структурная схема контура регулирования, преобразованная к единичной обратной связи для удобства определения ошибки регулирования, представлена на рис. 2.4. Передаточная функция разомкнутого
контура по управляющему воздействию (при FВ (p) = 0 ) имеет вид
Wраз (p) = Wрх (p)Wорx (p) = Wpx (p)W1op (p)W2op (p) (2.17)
где |
Wрх (p),Wорх (p) |
- |
передаточные функции соответственно |
регулятора |
переменной х |
и |
объекта регулирования; W2op (p) - |
передаточная функция объекта регулирования по возмущающему воздействию Fв (p) .
58

Xз 


 WРX (p)
WРX (p) 
 W1ОР (p)
W1ОР (p) 



 W2ОР (p)
W2ОР (p)

Fв
Рис. 2.4. Структурная схема замкнутого контура регулирования
Если для рассматриваемого контура регулирования определить передаточные функции ошибки по управляющему и возмущающему воздействиям, то с их помощью можно получить известное из теории автоматического управления изображение суммарной ошибки замкнутого контура регулирования:
∆XΣ (p) = |
Xз (p) +Fв (p)W2op (p) |
(2.18) |
|
1+ Wраз (p) |
|||
|
|
В результате приемлемых упрощений (2.17) может быть представлена в виде
|
j=n |
|
|
k∏(Tjp +1) |
|
W (p) = |
j=1 |
|
i=m |
||
разх |
||
|
pν∏(Tip +1) |
|
|
i=1 |
где ν — порядок астатизма контура;
m, n — число последовательно включенных инерционных и форсирующих звеньев;
k- коэффициент усиления разомкнутого контура.
(2.19)
соответственно
Для того чтобы после замыкания контура отрицательной обратной связью по регулируемой координате обеспечивались требуемая точность и динамические показатели качества регулирования, необходимо, чтобы ЛАЧХ разомкнутого контура имела вполне определенный вид и параметры. Общая форма желаемой ЛАЧХ разомкнутого контура представлена на рис. 2.5.
59
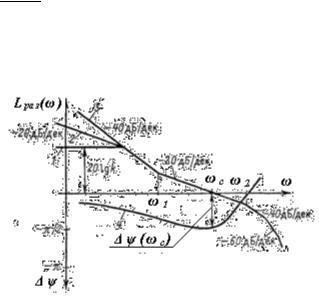
Чтобы удовлетворить требованиям, предъявляемым к электроприводу в отношении точности регулирования координаты, необходимо формировать низкочастотную область характеристики определенного вида. Эта область определяется коэффициентом k и порядком астатизма системы ν. Если ν = 0, т. е. в разомкнутом контуре регулирования отсутствуют интегрирующие звенья, система является статической системой регулирования, при этом статическая ошибка регулирования определяется в соответствии с (2.18) коэффициентом усиления контура k. Для получения требуемой точности необходимо предусмотреть коэффициент усиления, отвечающий условию
k ≥ Xзmax ,
∆Xдоп
где Xзmax - заданное значение переменной; ∆Xдоп - допустимая ошибка регулирования.
Рис. 2.5. Желаемые частотные характеристики разомкнутого контура регулирования
Если требуется исключить статическую ошибку по заданию,
необходимо, чтобы в контуре был интегрирующий элемент (ν=1), при этом будет иметься динамическая ошибка, возникающая при изменениях задания. Увеличение порядка астатизма (ν=2) повышает при надлежащем коэффициенте усиления k динамическую точность регулирования.
60