Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked

Путевая (конечная) защита защищает производственный механизм от движения рабочего органа механизма далее конечного положения. Она осуществляется конечными (путевыми) выключателями (например, ограничение хода тележки мостового крана в направлении вперед и назад осуществляется двумя конечными выключателями, установленными на определенном расстоянии от конечного положения тележки с учетом выбега электропривода при торможении).
Контрольные вопросы:
1.Какие достоинства и недостатки присущи управлению пуско – тормозными режимами в функции тока?
2.Почему данный способ не имеет широкого применения на практике?
3.Как выполняется пуск двигателя выше основной скорости и контроле величины якорного тока?
4.Почему в схеме рис. 1.15 применяют два реле противовключения?
5.Приведите символьное описание работы схемы на рис.1.15
6.Что такое защита в схемах электропривода?
7.Какие аварийные режимы могут быть в электрических цепях электропривода?
8.Какие аварийные режимы могут возникнуть в механической части электропривода?
9.Как осуществляется максимально – токовая защита электропривода?
10.Как выбирается токовая уставка для асинхронных короткозамкнутых двигателей?
11.Как правильно выбрать предохранители для защиты двигателя постоянного тока?
12.С какой целью выполняется минимальная токовая защита?
13.Чем опасен обрыв обмотки возбуждения двигателя постоянного тока?
14.С какой целью применяют тепловую защиту электропривода?
15.Какие электрические аппараты применяют для осуществления тепловой защиты электропривода?
16.Как выполняется тепловая защита при повторно – кратковременном режиме работы?
17.Как реализуется защита от самозапуска электропривода?
46
18.Как выполняется защита от самозапуска с использованием командоконтроллера?
19.С какой целью обмотку возбуждения двигателя шунтируют резистором? Какова должна быть величина этого резистора? Зачем в цепь данного резистора включают диод?
20.Что такое конечная защита? При помощи каких электрических аппаратов реализуется эта защита?
1.8. Блокировки и сигнализация в схемах электропривода
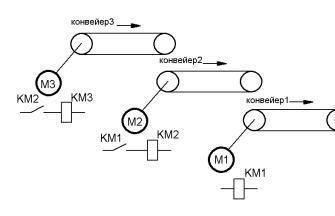
Блокировки в электрических схемах обеспечивают правильный порядок работы схем, исключают ложные и аварийные включения аппаратов и повышают надежность работы схем электропривода. По назначению блокировки разделяются на технологические и защитные. По исполнению блокировки бывают внутренние, осуществляемые между аппаратами одной схемы, как электрические, так и механические (например, в схеме механизма подъема мостового крана), и внешние – между схемами различных электроприводов (например, между схемами последовательно расположенных конвейеров, блокировки предотвращают засыпание конвейера при его остановке, отключая предыдущий конвейер рис. 1.22).
Рис.1.22. Пример внешней блокировки
Технологические блокировки используются для осуществления заданной последовательности работы схемы (например, пуск двигателя в противоположном направлении возможен только после осуществления торможения противовключением, для чего контакторы ускорения получают питание через контакт контактора противовключения рис.1.12)
47
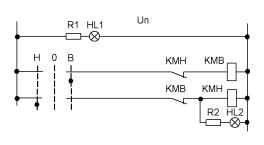
Защитные блокировки предотвращают ложные срабатывания в схеме и защищают двигатели, механизмы, а иногда и операторов от неправильных действий. Примером может служить применяемые в схемах блокировки реверсивных контакторов (рис. 1.23), или линейных и тормозных контакторов, исключающие одновременные ложные включения контакторов. К защитным блокировкам относятся путевые блокировки, ограничивающие движение механизмов и защищающие их от поломки (например, предотвращают подъем крюка подъемного крана выше заданного положения), и блокировки, защищающие оператора от его неправильных действий (например, невозможность работы на точильном станке при поднятом защитном стекле).
Рис.1.23. Пример защитной блокировки и сигнализации
Сигнализация, применяемая в схемах электроприводов, разделяется на контрольную, технологическую и аварийную. Контрольная сигнализация служит для контроля наличия того или иного сигнала или напряжения питания (лампа HL1 на рис. 1.23), и истинного состояния включающих и отключающих аппаратов. Технологическая сигнализация указывает последовательность операций, совершаемых схемой электропривода, например, движение механизма вперед или назад (лампа HL2 на рис.1.23), включенное или отключенное состояние аппаратов и т.д. Аварийная сигнализация указывает аварийное состояние схемы или действия той или иной защиты в схеме. Сигнализация выполняется световой (лампы, световые табло), звуковой (звонок, сирена), и визуальной (указательные реле).
ГЛАВА 2. РЕГУЛИРОВАНИЕ КООРДИНАТ ЭЛЕКТРОПРИВОДА
Электропривод осуществляет не только преобразование электрической энергии в механическую, необходимую для совершения полезной работы, но и управление рабочим процессом приводимого в
48
движение механизма в соответствии с технологическими требованиями. Технологические требования определяют необходимость на отдельных этапах работы задавать и с требуемой точностью поддерживать на заданном уровне те или иные механические переменные (положение рабочего органа механизма, его скорость, ускорение, момент двигателя, нагрузку передач и т.д.); принудительно изменять эти переменные в процессе управления технологическим процессом; ограничивать переменные уровнем, допустимым по условиям технологии или прочности механического оборудования, а также по нагреву и перегрузочной способности двигателя, т.е. определяют необходимость регулирования координат электромеханической системы электропривода.
В зависимости от задач управления электроприводом и механизмом регулирование координат может осуществляться с целью:
1)поддержания заданного значения переменной;
2)изменения переменной по требуемому закону;
3)ограничения переменной допустимым значением;
4)отработки произвольных законов движения, задаваемых на входе системы, с требуемой точностью.
Как известно из теории автоматического управления, существуют два способа регулирования переменных системы: регулирование по отклонению переменной от заданного значения, основанное на использовании отрицательной обратной связи по регулируемому параметру, и регулирование по возмущению, предполагающее компенсацию влияния возмущения с помощью положительной обратной связи.
При регулировании переменных электромеханической системы в качестве регулируемого может быть использован любой параметр, от которого данная переменная зависит.
2.1. Показатели качества регулирования
Качество процесса регулирования - это совокупность пока-
зателей, характеризующих поведение системы электропривода в установившихся и переходных режимах при отработке задающих и возмущающих воздействий.
Показатели качества регулирования позволяют оценить свойства системы регулирования в статических и динамических режимах работы. Показатели качества регулирования подразделяют на статические (в установившемся режиме работы) и динамические (в переходных режимах работы).
49
2.1.1. Статические показатели качества регулирования
Качество системы регулирования в установившемся режиме оценивается по следующим основным показателям [5,14].
• Диапазон регулирования – это отношение максимальной возможной скорости при регулировании к минимальной скорости при заданных изменениях момента нагрузки
D = |
ωmax |
(2.1) |
|
ωmin |
|
|
|
Верхний предел скорости ωmax ограничен механической прочностью якоря (ротора) или элементов кинематической цепи привода, либо коммутационной способностью коллектора.
Нижний предел скорости ωmin, как правило, ограничивается возможностью поддержания заданной скорости с необходимой точностью при возможных колебаниях статического момента (нагрузки) на валу двигателя. Обычно принимают изменение статического момента на валу двигателя от 0 до (1,5…2,0)Мс, где М с – расчетное значение момента статической нагрузки. На рис.2.1 для минимальной скорости вращения принята характеристика 1, проходящая при нулевой скорости через точку 2Мн. В этом случае диапазон регулирования может быть определен при номинальном моменте через соотношение
D = ω |
= ∆ω . |
(2.2) |
|
|
ωmax |
ωmax |
|
|
min1 |
н |
|
50