Материал: fomin-n-v-sistemy-upravlenija-elekt-437151079-unlocked
Если приравнять нулю управляющее воздействие (Ed = 0), то можно получить передаточную функцию двигателя по возмущающему воздействию, когда выходной координатой является статическая просадка скорости, а входной – ток статический (нагрузка):
|
|
|
|
|
Xвых (p) ∆ω(p) |
|
|
|
|
|
|
Rэ (T p +1) |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
э |
|
|
|
|
||||||||||||||||||
WU (p) = X |
|
|
|
|
|
|
= I |
|
|
|
= − |
|
|
|
|
|
|
|
|
|
|
. (2.34) |
|||||||||||||||
|
|
|
(p) |
(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
вх |
T T p2 |
+ T p +1 |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
э |
|
|
м |
|
|
|
м |
|
|
|
|
||||||
Знак минус в последнем выражении говорит о том, что при |
|||||||||||||||||||||||||||||||||||||
приложении статического |
тока |
(момента) |
|
|
скорость |
уменьшается |
|||||||||||||||||||||||||||||||
(происходит просадка скорости). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
Ed |
|
|
|
|
|
|
|
|
|
|
|
Ia |
|
|
Iс |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
1 Rэ |
|
|
|
|
|
|
|
|
|
Rэ / с |
|
ω |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
Еа |
|
|
|
|
|
Тэр +1 |
|
|
|
|
|
|
|
|
|
|
|
Тмр |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Ed |
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
Mc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
с Rэ |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
ω |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Тэр +1 |
|
|
|
|
|
|
|
|
|
|
|
|
JΣр |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
Ea |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
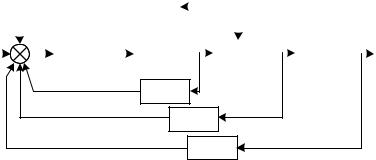
Рис.2.8. Структурные схемы двигателя постоянного тока независимоговозбуждения
Как видно из (2.33) и (2.34) электродвигатель является колебательным звеном. Корни характеристического уравнения определяются выражением:
|
1 |
|
|
|
|
|
|
p = − |
± |
Tм |
−1 , |
(2.35) |
|||
|
|
||||||
1,2 |
|
2Tэ |
|
4Tэ |
|
||
|
|
|
|
||||
|
71 |
|
|
|
|
|
|

из которого видно, что при Tм < 4Tэ получаются комплексные
корни и переходный процесс будет колебательным с коэффициентом демпфирования, определяемым соотношением постоянных времени
ξ = |
1 |
Tм |
. |
|
2 |
T |
|
|
|
э |
|
Контрольные вопросы:
1.Какие основные особенности присущи тиристорному преобразователю, как элементу системы электропривода?
2.Какой передаточной функцией может быть представлен ТП?
3.Как определить коэффициент передачи ТП?
4.При каких условиях ТП может быть представлен апериодическим звеном?
5.Как схема выпрямления влияет на передаточную функцию ТП?
6.Как можно определить постоянную времени ТП?
7.Как влияет частота питающей сети на передаточную функцию
ТП?
8.Как правильно рассчитать эквивалентное активное сопротивление системы ТП-Д?
9.Как можно рассчитать индуктивность ТП?
10.Как можно рассчитать индуктивность якорной цепи электродвигателя постоянного тока?
11.Как правильно рассчитать активное сопротивления якорной цепи двигателя?
12.Как рассчитать эквивалентную постоянную времени якорной цепи в системе ТП-Д?
13.Как по паспортным данным двигателя рассчитать величину номинального магнитного потока?
14.Как получить передаточную функцию якорной цепи в системе
ТП-Д?
15.Выведите передаточную функцию электромеханического преобразователя электродвигателя.
16.Выведите передаточную функцию двигателя по управляющему воздействию.
72
17.От чего зависит затухание колебательных переходных процессов в двигателе?
18.Как получить передаточную функцию двигателя по возмущающему воздействию?
19.Что определяет характер протекания переходных процессов в двигателе?
20.В каком случае переходные процессы в двигателе будут колебательными?
|
|
|
|
|
|
Uof |
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wоf (p) |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Uз |
|
∆u |
|
|
U |
|
|
|
|
|
|
Y1 |
|
|
|
|
Y2 |
|
|
|
Y3 |
||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
W |
(p) |
|
|
W |
(p) |
|
W |
(p) |
|
W |
(p) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
рег |
|
|
|
|
ор1 |
|
|
|
|
|
ор2 |
|
|
|
ор3 |
|
|
|
|
Uоc1 |
W |
(p) |
Uоc2 |
о1 |
|
|
Wо2 (p) |
|
Uоc3 |
|
|
|
Wо3 (p) |
|
|
|
Рис. 3.1. Структурная схема СУЭП с параллельными обратными связями
ГЛАВА 3. СИСТЕМЫ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОВ С ПАРАЛЛЕЛЬНЫМИ ОБРАТНЫМИ СВЯЗЯМИ
3.1. Общие понятия и определения
Системы управления электроприводов с параллельными обратными связями имеют один регулятор, на вход которого заводят обратные связи по регулируемым координатам. Структурная схема такой
системы приведена на рис. 3.1, на которой Uз - напряжение задания; Wрег (p) - передаточная функция регулятора; Wорi (p) - передаточная функция объекта регулирования i-ой координаты; Yi - регулируемая i-ая координата; Wоi (p) - передаточная функция цепи обратной связи i-ой координаты; Uосi -напряжение обратной связи i-ой координаты; f - возмущающее воздействие; Wоf (p) - передаточная функция цепи
73
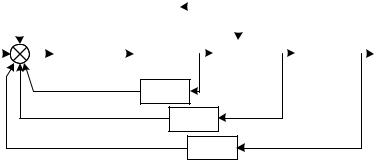
обратной связи по возмущению; Uоf - напряжение обратной связи по возмущению; ∆u -ошибка регулирования.
|
|
|
|
|
|
Uof |
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Wоf (p) |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Uз |
|
∆u |
|
|
U |
|
|
|
|
|
|
Y1 |
|
|
|
|
Y2 |
|
|
|
Y3 |
||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
W |
(p) |
|
|
W |
(p) |
|
W |
(p) |
|
W |
(p) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
рег |
|
|
|
|
ор1 |
|
|
|
|
|
ор2 |
|
|
|
ор3 |
|
|
|
|
Uоc1 |
W |
(p) |
Uоc2 |
о1 |
|
|
Wо2 (p) |
|
Uоc3 |
|
|
|
Wо3 (p) |
|
|
|
Рис. 3.1. Структурная схема СУЭП с параллельными обратными связями
Система управления электроприводом с обратной связью по регулируемой координате носит название замкнутой.
В замкнутой системе регулирования сигнал управления формируется из напряжения задания и напряжения обратной связи, несущего информацию о фактическом значении регулируемой координаты Y, которое зависит от возмущений, действующих на узлы системы и рабочий орган электропривода. В результате введения обратной связи ошибка регулирования уменьшается до допустимого
значения. Сигнал управления U системы электропривода с обратной связью представляет собой отклонение (ошибку) регулирования
относительно напряжения задания Uз . При этом ни одно из
возмущающих воздействий не измеряется, а их влияние на регулируемую координату воспринимается системой по каналу обратной связи. Следовательно, в системах с отрицательной обратной связью по выходной координате реализуется управление по отклонению.
Обратная связь представляет собой канал передачи и преобразования информации с выхода системы регулирования или ее узлов на вход с целью формирования результирующего сигнала управления. Обратные связи классифицируют:
• По знаку воздействия обратная связь может быть отрицательной, если полярности сигналов задания и обратной связи
74

противоположные, и положительной, если полярности сигналов задания и обратной связи одинаковая;
• По виду воздействия обратные связи разделяют на жесткие (с
передаточной функцией |
Wос (p) = kос ), гибкие (с передаточной |
|
функцией W (p) = Tдp |
(Tфp +1) |
, которые действуют в переходных |
ос |
|
|
|
|
|
режимах, и задержанные (с зоной нечувствительности или отсечкой), когда обратная связь начинает действовать только с определенного уровня регулируемого параметра.
• По регулируемой координате обратные связи бывают по скорости, по напряжению, по току, по моменту, по положению, по ЭДС и т.д.
Жесткие и задержанные обратные связи используются, в первую очередь, для формирования статических характеристик электропривода. Жесткие и особенно гибкие обратные связи применяют для обеспечения устойчивости системы регулирования и получения желаемых динамических показателей.
Кдостоинствам СУЭП с параллельными обратными связями относится наличие только одного регулятора, высокое быстродействие, простота реализации.
Кнедостаткам относятся сложность настройки системы, низкое качество переходных процессов, невозможность одновременного качественного регулирования нескольких координат из – за взаимного их влияния друг на друга, сложность ограничения регулируемых координат.
3.2.СУЭП с отрицательной обратной связью по напряжению
Принципиальная схема системы управления электроприводом с отрицательной обратной связью по напряжению двигателя (напряжению ТП) представлена на рис. 3.2. На первый вход регулятора (Рег) подается задающее воздействие (регулируемое напряжение задания Uз). При реализации регулятора на интегральном операционном усилителе (ОУ) максимальные входные напряжения не должны превышать величины 10В. Обратная связь по напряжению двигателя (или, что одно и то же, по напряжению ТП) формируется делителем напряжения на резисторах R1 и R2, таким образом, чтобы при максимальной величине напряжения ТП падение напряжения на резисторе R2 не превышало 10 В. Напряжение с делителя R1 - R2 Uдел подается на вход датчика напряжения (ДН), осуществляющего гальваническую развязку силовых цепей от цепей управления и имеющего, как правило, единичный коэффициент усиления. С выхода ДН напряжение обратной связи Uон
75