Материал: Д6757 Балюбаш ВА Средства автоматизации Ч1
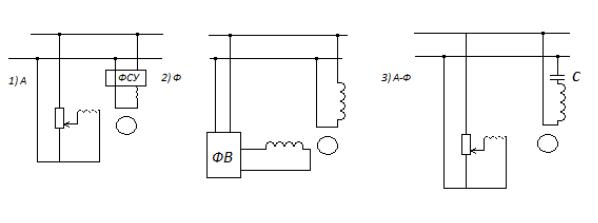
ся. При регулировании тока в обмотке управления вносится асимметрия в МДС обмоток и вместо кругового магнитного поля в машине возникает поле эллиптическое. При этом наряду с напряжением и токами прямой последовательности фаз, создающими двигательный режим, возникают напряжения и токи обратной последовательности фаз, вызывающие тормозное действие.
Меняя степень асимметрии, можно регулировать скорость двигателя.
В зависимости от способа создания асимметрии магнитного поля, различают три вида управления: амплитудный, фазовый и ам- плитудно-фазовый (рис. 34).
Рис. 34
9. Шаговые двигатели
Они представляют собой электромеханические устройства, которые преобразуют импульсы тока в дискретное угловое или линейное перемещение. Широкое применение шаговые двигатели получили с внедрением дискретных систем, для которых необходимы импульсные исполнительные устройства. В связи с этим были разработаны шаговые двигатели по принципу синхронной машины. Каждому импульсу отвечает перемещение ротора двигателя на один шаг, величина которого определяется физическими и конструктивными особенностями двигателя, а также схемой управления. Отработка одного шага осуществляется с некоторой погрешностью, но и отработка нескольких шагов может иметь ту же погрешность, т.е. ошибка не на-
46
капливается. Поэтому системы управления с шаговыми двигателями обычно строятся как разомкнутые, без обратной связи по положению.
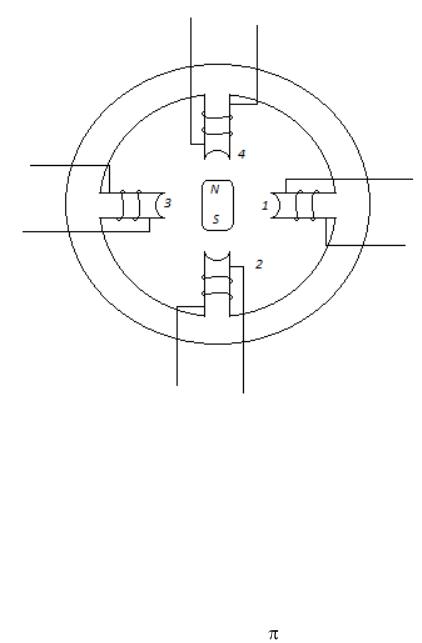
В настоящее время применяют в основном два типа шаговых двигателей: с активным ротором и реактивные. Как правило, их выполняют многофазными (3, 4, но не более 8). Шаговый двигатель с активным ротором аналогичен синхронному двигателю (рис. 35).
Рис. 35
Ротор представляет собой постоянный магнит. Сердечник статора имеет ряд выступов, на которых располагаются сосредоточенные обмотки.
Управление осуществляется однополярными импульсами. При подаче импульса на обмотку 1 ротор повернѐтся на угол 90о. Следующий импульс, поданный на обмотку 2, опять вызовет поворот ротора на 90о. Чтобы увеличить момент вращения, иногда включают обмотки попарно в последовательности 1–2, 2–3, 3–4 и т.д. Шаг ротора в обоих случаях будет составлять 2 /m. Для уменьшения шага вдвое вместо симметричного включения обмоток используют несимметричное по схеме 1, 1–2. 2, 2–3 и т.д. При этом число устойчивых положений удваивается. Увеличить число устойчивых положений можно использованием разнополярных импульсов. Большое досто-
47
инство шагового двигателя с активным ротором – это наличие момента, удерживающего ротор в занимаемом им положении при отключѐнном двигателе.
Реактивный шаговый двигатель аналогичен редукторному синхронному двигателю. Ротор его выполняется из мягкой электротехнической стали и имеет зубчатую структуру. Статор выполняется с явнополюсной структурой, причѐм полюсные наконечники имеют зубцы. В реактивном двигателе отсутствует момент при отключенных обмотках. Для устранения этого недостатка обмотки статора могут подпитываться постоянным током или в магнитопровод статора встраивают постоянные магниты.
Наиболее тяжѐлыми для шагового двигателя являются переходные режимы – пуск и торможение. Основное требование при этом не пропустить импульс и не потерять шаг. Пуск осуществляется подачей сигналов с частотой, соответствующей требуемой скорости. Максимальная частота, при которой двигатель может разогнаться без потери шага, называется частотой приѐмистости. Ещѐ более тяжѐлым режимом для шагового двигателя является реверс. Частота, при которой изменяя последовательность переключения токов в обмотках, можно обеспечить реверс без потери шага, меньше частоты приѐмистости.
10.Моментные двигатели
Вмоментных двигателях ротор, развивая необходимый момент, поворачивается лишь на весьма малые углы, составляющие долю его оборота. Таким образом, двигатель работает с практически неподвижным ротором или, как говорят, в режиме короткого замыкания. В качестве моментных могут быть использованы двигатели различных типов как постоянного так и переменного тока.
Наиболее рационально использование двухфазного синхронного двигателя с возбуждением от постоянного магнита и питанием обмотки статора постоянным током (рис. 36).
48
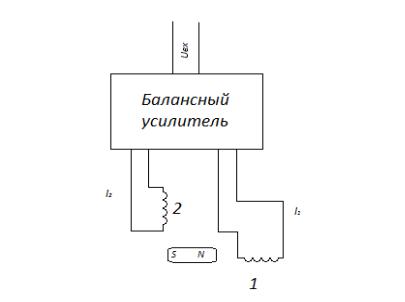
Рис. 36
Изменяя соотношение токов от I1 = max, I2 = 0 до I1 = 0, I2 = max, можно обеспечить поворот ротора в пределах 90о.
Системы с моментными двигателями отличаются повышенным быстродействием, так как двигатель практически не вращается, то его механическая инерция не влияет на динамику системы.
11.Двигатели для микроперемещений
Вряде случаев в приводах высокоточных систем требуется отработка перемещений, составляющих несколько микрометров. При использовании в таких системах шаговых двигателей как обладающих малым угловым шагом всѐ же необходима механическая передача с большим передаточным отношением, которой свойственны погрешности. В связи с этим необходимы двигатели для микроперемещений, выполненные на иной физической основе.
Принципиально возможно построение двигателей, в которых используются следующие физические явления: тепловое расширение тела, электромагнитное взаимодействие, магнитострикция, обратный пьезоэффект.
Широкое применение получили магнитострикционные двигатели, в которых используется свойство стержня из ферромагнитного материала изменять длину под воздействием магнитного поля.
49
При использовании стержней из никеля, кобальта при их длине 100 мм свободный конец может переместиться на 2–5 мкм. Недостаток такого двигателя – инерционность, обусловленная процессами в намагничивающей катушке. Полоса пропускания управляющего сигнала составляет 30 Гц.
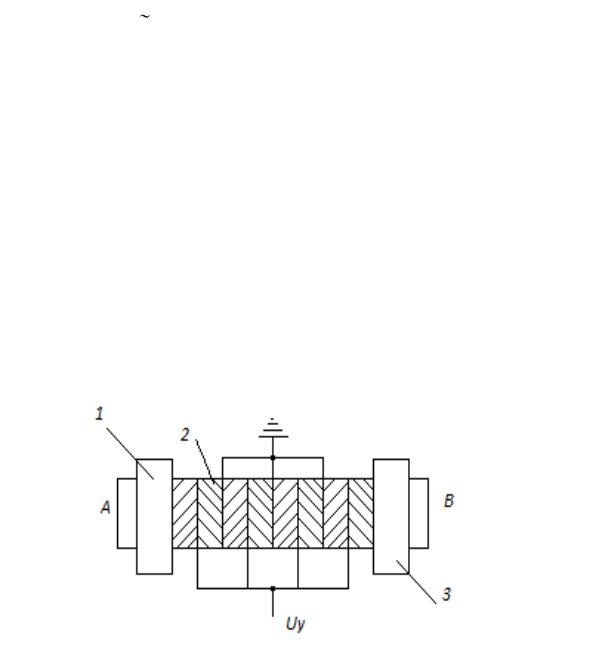
Наиболее предпочтителен пьезоэлектрический двигатель, выполняемый обычно как столбик из пьезокерамических шайб, склеенных между собой. Исходным материалом для пьезокерамики служат оксиды металлов (титанат бария, цирконат-титанат свинца и др.). Когда к торцевым поверхностям шайб приложено напряжение, то в зависимости от ориентации электрического поля столбик сжимается или удлиняется, максимальное изменение линейных размеров может составить до 25 мкм при базовой длине столбика 50 мм. Существенное достоинство пьезоэлектрического двигателя – быстродействие, а полоса пропускания достигает 1000 Гц. К недостаткам рассмотренных двигателей относится наличие петли гистерезиса. Усилия, которые могут создавать эти двигатели, зависят от размеров стержня и шайб, и в реальных устройствах составляют несколько сотен ньютонов (рис. 37).
Рис. 37
Часто максимальные перемещения, которые обеспечивают магнитострикционный и пьезоэлектрический двигатели, недостаточны. Тогда прибегают к шаговым двигателям, построенным на тех же принципах.
50