Материал: Д6757 Балюбаш ВА Средства автоматизации Ч1
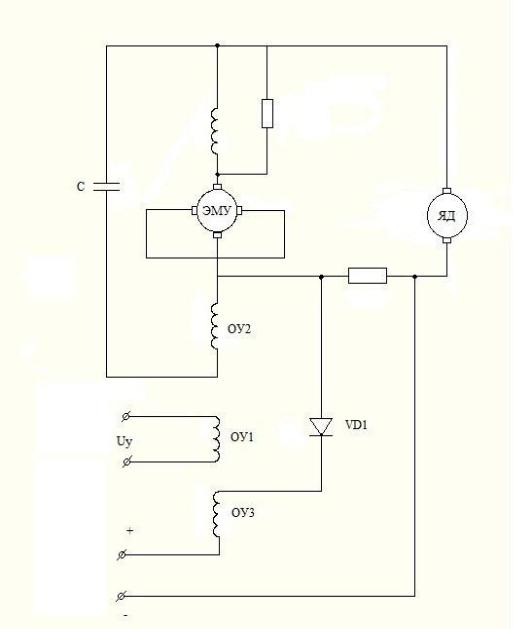
пряжения от тока короткого замыкания в якорной цепи. Подобная схема применима в условиях нереверсивного направления движения системы.
Рис. 25
В этом случае, когда изменяется направление тока в обмотке задающей, изменяется и направление тока в цепи задержанной обратной связи, постоянно обеспечивая размагничивающее действие.
36
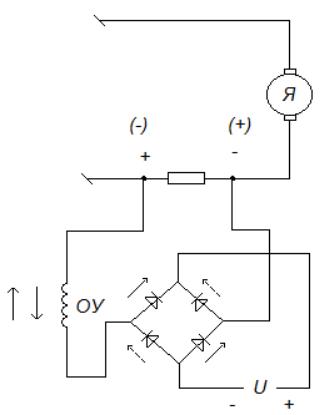
При необходимости реверса схема (см. рис. 25) выглядит так (рис. 26):
Рис. 26
7.3. Тиристорные приводы
Тиристор представляет собой не полностью управляемый прибор, который включается подачей соответствующего потенциала на управляющий электрод, а отключается только принудительным разрывом цепи тока за счѐт отключения напряжения, естественного перехода его через ноль или подачи гасящего напряжения обратного знака.
Изменением момента подачи управляющего напряжения (его задержкой) можно регулировать среднее значение выпрямленного напряжения и тем самым скорость двигателя. Среднее значение выпрямленного напряжения в основном определяется схемой включения тиристорного преобразователя. В установках средней и большой мощности применяются мостовые схемы преобразователей. Все ва-
37
рианты тиристорных преобразователей наряду с положительными свойствами (малой инерционностью, отсутствием вращающихся элементов, меньшими размерами) обладают и рядом недостатков: жесткой связью с питающей сетью (все колебания напряжения в сети передаются в систему привода, а толчки нагрузки на оси двигателя немедленно передаются в сеть и вызывают всплески тока); низким коэффициентом мощности и др.
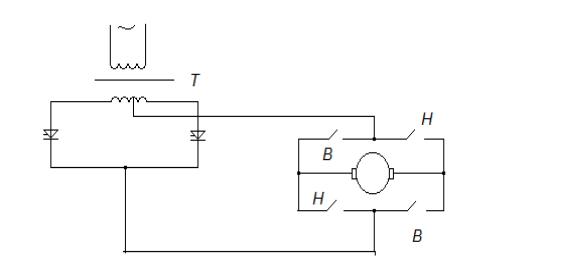
Представленная схема (рис. 27) обеспечивает регулирование скорости за счѐт изменения напряжения, приложенного к якорю двигателя, а реверс – за счѐт изменения направления тока якоря с помощью контакторов.
Рис. 27
Механическая характеристика двигателя, питаемого от тиристорного преобразователя, определяется напряжением, приложенным
кякорю и характером его изменения с нагрузкой.
Втиристорном приводе напряжение на якоре двигателя в установившемся режиме определяется выпрямленным напряжением преобразователя и падениями напряжения в цепи, образованной вторичной обмоткой силового трансформатора, тиристорами и обмоткой якоря (рис. 28).
Среднее значение выпрямленного напряжения определяется:
Uв.ср. = Uв.о.  cos
cos

38
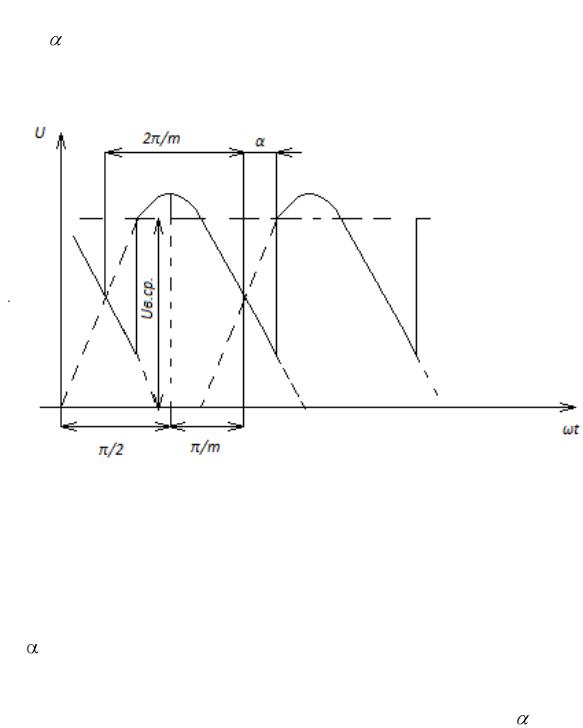
где Uв.о .– выпрямленное напряжение неуправляемого преобразователя;
– угол регулирования или угол запаздывания подачи управляющего потенциала.
Рис. 28
Среднее значение выпрямленного напряжения m-фазного выпрямителя называют отношение интеграла вычисленного для кривой выпрямленного напряжения за время протекания тока через один тиристор, к тому же интервалу времени.
Зависимость выпрямленного напряжения от угла регулирования нелинейна и графически выражается законом косинуса.
Выпрямленное напряжение тиристорного преобразователя регулируется изменением момента подачи управляющего сигнала на включение тиристора, т.е. изменение угла регулирования . В настоящее время используют так называемое вертикальное управление, основанное на сравнении задающего сигнала с пилообразноизменяющимся напряжением. В момент их равенства с помощью нульоргана подаѐтся сигнал на включение тиристора соответствующей фазы. Управляющий сигнал формируется фазосдвигающим устройством (ФСУ).
39
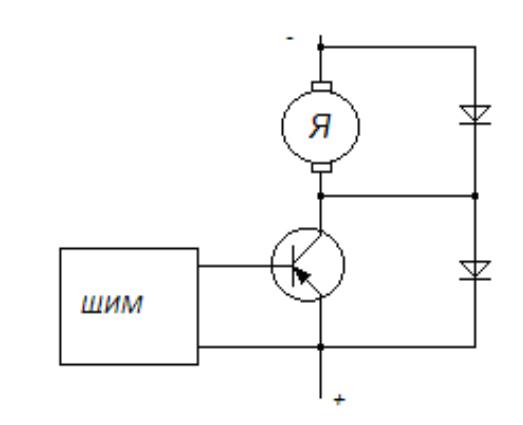
7.4. Импульсное управление двигателями
Как правило, в технике электропривода используется широт- но-импульсная модуляция (ШИМ). При этом среднее значение напряжения на якоре двигателя регулируется за счѐт изменения длительности (ширины) импульса. Актуальное значение имеет выбор частоты импульсов (переключений). Для того, чтобы свести к минимуму пульсации скорости, целесообразно работать на повышенной частоте. Однако это приводит к росту потерь в транзисторах и осложняет коммутацию тиристоров. Обычно частоту импульсов выбирают для систем широтно-импульсного управления на транзисторах в пределах 1–5 кГц, а для систем на тиристорах – примерно 1 кГц. Существует большое количество схем установок с однополярными импульсами, которые являются нереверсивными (рис. 29). Преимущественно используются реверсивные с разнополярными импульсами
(рис. 30).
Рис. 29
40