Материал: Д6590 Данин ВБ Автоматизированные комплексы
Приведѐнное выше математическое обеспечение может быть использовано как алгоритм при подготовке программы для контроллера, реализующего ПЗ-закон, например, для программируемого логического контроллера типа ПЛК фирмы ОВЕН [2].
Программирование контроллера ПЛК выполняется с использованием среды программирования CoDeSys
Математическое обеспечение позволяет также реализовать модель контура позиционной САР и проводить исследование поведения системы в различных производственных ситуациях и при различных настройках САР. В прил. 1 приведен пример реализации такой модели имитирующей работу САР бака-накопителя. На рис. П 1 прил. 1 текст программного модуля REGAST 1, оформленного в среде Qbasic. В модуль внесены характеристики объекта (из табл. 1) и выбранные параметры настройки регулятора (из табл. 2). На рис. 7 результаты проверки на модели настройки регулятора. На рис. 7, А переходные характеристики САР при номинальной нагрузке g2 = 40 кг/с. На рис. 7, Б переходные характеристики САР при минимальной нагрузке g2 = 5 кг/с. В комментариях к рисункам даны оценки качества регулирования: величина статической ошибки при установившихся колебаниях регулируемой величины и время цикла.
26
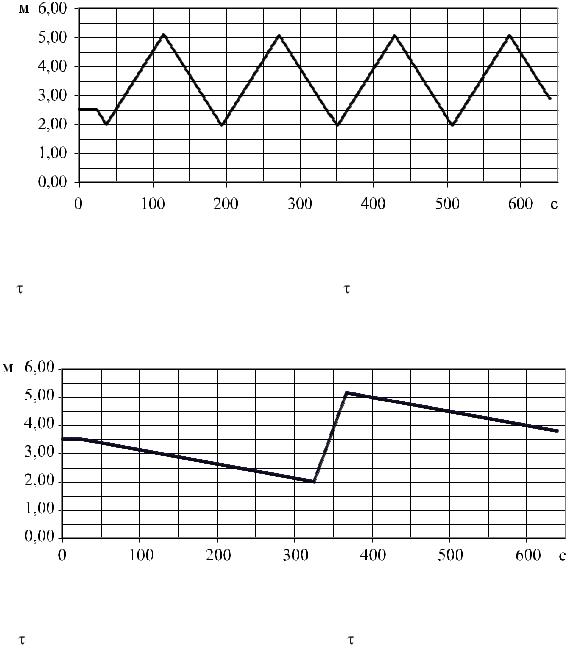
А. Переходные характеристики САР бака-накопителя: gn = 80 кг/с, tz = 20 с. Параметры настройки регулятора hpw = 5 м, hpl = 2 м.
До = 250 с, g2 = 0, yp = 0 при h = 2,5 м; момент = 250 с возмущение g2 = 40 кг/с. Из обработки графика. Динамический заброс при наливе – до 5,08 м,
при сливе – до 1,92 м. Время цикла zp = 1500 с
Б. Переходные характеристики САР бака накопителя: gn =80 кг/с, tz = 20 с. Параметры настройки регулятора hpw = 5 м, hpl = 2 м.
До = 250 с, g2 = 0, yp = 0 при h = 3,5 м; момент = 250 с возмущение g2 = 5 кг/с Из обработки графика. Динамический заброс при наливе – до 5,14 м,
при сливе – до 1,99 м. Время цикла zp = 7000 с.
Рис. 7. Результаты проверки на модели выбора параметров настройки пропорционального закона системы автоматического регулирования бака-накопителя
27

АНАЛИЗ УСЛОВИЙ ЭКСПЛУАТАЦИИ СБАЛАНСИРОВАННОГО АСТАТИЧЕСКОГО ОБЪЕКТА
Особенностью сбалансированного статического объекта является возможность изменять управляющее воздействие y функциональ-
но: y[τ] = y{ymin… ymax}. Что позволяет получить на объекте статические (равновесные) состояния x[τ] =: y[τ], при которых численные зна-
чения регулируемого параметра z остается постоянными.
На рис. 2 вариант использования бака в качестве промежуточной емкости в поточном технологическом процессе приготовления смеси из нескольких компонентов. В этом случае жидкость, например, молоко, из бака отбирается через дозировочное устройство, например, через калиброванное отверстие. Отбор молока производят в количестве g2, кг/с (возмущающее воздействие x), заданном по рецептуре смеси, например, дозировка в хлебопекарное тесто. Для восстановления уровня в баке hр, м (уставка для регулируемого параметра z) из магистрали подачи через функционально управляемый клапан подается жидкость в количестве g1, кг/с (управляющее воздействие y). Предусмотрена возможность функционального изменения численного значения g1 = g1min … g1max командой управления, например, yl = 0…100 % ХРО, где yl – численное значение величины закрытия регулирующего органа (клапана), выраженное в %.
Возмущающее воздействие x – количество отбираемой из бака жидкости g2 может изменяться. Например, к одному баку могут быть подключены несколько дозирующих устройств, каждое из которых обеспечивает дозировку данного компонента на свой агрегат. Включение и отключение подачи жидкости на каждый агрегат определяется производственной ситуацией. Например, количество дозируемой жидкости может определяться продолжительностью времени открытия клапана подачи на данный агрегат. Возможно также изменение настройки расхода через каждое дозирующее устройство при переходе на другой состав смеси.
Для установления диапазона варьирования количества отбираемой из бака жидкости определяют верхний предел варьирования:
|
m |
g2 max |
g2 max (φ) , |
|
ψ 1 |
где m – число дозирующих устройств, подключенных к баку; g2max( ), кг/с – максимальное количество жидкости, дозируемое -м дозатором.
28

Нижний предел варьирования: g2min = g2min( ) определяется по минимальному расходу при работе одного из дозирующих устройств.
Численное значение расхода через дозатор g2( ) определяется величиной калиброванного отверстия дозатора fd( ), м2 и перепадом давлений жидкости на входе и выходе дозатора. При свободном сливе из дозатора, изменение перепада давлений определяется только давлением на входе, т. е. для стабилизации дозировки жидкости по каналу необходимо обеспечить постоянство гидростатического давления, создаваемого уровнем жидкости в дозировочной емкости. Отсюда следует, что уровень жидкости в емкости дозатора должен поддерживаться с минимальной ошибкой вблизи заданного значения уставки регулятора уровня hp.
Для реализации задачи длительного и точного удержания уровня вблизи уставки hp на объекте установлен функциональный регулирующий клапан, управляющий в широком диапазоне интенсивностью подачи жидкости в бак g1 = 0 … g1max командой управле-
ния yl = 0 … 100 % ХРО.
При создании САР сбалансированных астатических объектов реализуют функциональные законы (ПИ, ПИД) регулирования, которые принципиально могут обеспечить поддержание регулируемого параметра в статическом состоянии вблизи уставки zp с минимальной статической ошибкой при любых производственных ситуациях (в расчетном диапазоне варьирования g2min < g2[τ] < g2max). Выбирая параметры настройки регулятора, можно обеспечить оптимальную форму переходной характеристики САР в динамическом процессе при переходе из одного равновесного состояния g1[τ1] = g2[τ1] в другое установившееся состояние g1[τ2] = g2[τ2]. Для объектов этого типа целесообразно выбирать переходные процессы близкие к симметричным затухающим колебаниям, например, процесс с минимальной интегральной ошибкой
29
АНАЛИЗ СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ СВОЙСТВ БАКА-ДОЗАТОРА
Рассматриваются функциональные зависимости регулируемого параметра – уровня в баке h, м (отклик) – от возмущающих воздействий (суммарный отбор жидкости на дозаторе g2, кг/с) и от управляющего воздействия (подача жидкости в бак g1, кг/с).
Ранее было показано, что для бака, как астатического объекта, динамические свойства определяются зависимостью:
|
dh |
|
|
|
τ 2 |
|
|
ε(g1 – g2), или h= |
ε(g1 |
g2 )dτ , |
|||
|
|
|||||
|
dτ |
|||||
|
|
|
|
τ1 |
|
|
|
|
|
|
|
|
|
где ε = 1/ρfb, ρ – плотность жидкости, кг/м3, fb – площадь бака, м2 |
||||||
При (g1[τ] – g2[τ]) = 0, |
dh |
[ ] 0 и h[τ] =h{hmin…hmax} = const, т. е. |
||||
|
||||||
|
|
|
d |
|
|
|
численное значение уровня может принять любую величину в диапазоне варьирования.
На рис. 2 представлены характеристики сбалансированного астатического объекта при различных сочетаниях возмущающих g2 и управляющих g1 воздействий:
g1>g2, dhd > 0 на отрезке времени τ1…τ2, при этом изменение численного значения уровня в баке растет:
|
|
|
1 |
2 |
|
|
|
|
|
||
|
|
h[τ2] = h[τ1] + |
|
(g1 g2 )dτ ; |
|
|
|
ρfb |
|||
|
|
|
1 |
||
|
|
|
|
||
g1 = g2, |
dh |
= 0 на отрезке времени τ2…τ3, при этом численное |
|||
d |
|||||
|
|
|
|
||
значение уровня в баке постоянно: h[τ2…τ3] = h[τ2] = const;
g1 < g2, dhd < 0 на отрезке времени τ3…τ4, при этом численное значение уровня в баке уменьшается:
|
|
|
1 |
4 |
|
|
|
h[τ4] = h[τ3] – |
|
(g1 g2 )dτ ; |
|
|
|
ρfb |
|||
|
|
|
3 |
||
|
|
|
|
||
g1 = g2, |
dh |
= 0 на отрезке времени τ4…τ5, при этом численное |
|||
d |
|||||
|
|
|
|
||
значение уровня в баке постоянно: h[τ4…τ5] = h[τ4] = const.
30