Материал: Д6590 Данин ВБ Автоматизированные комплексы
Из данного примера следует, что зависимость выходного параметра z от возмущения x и управляющего воздействия y для астатического объекта представляет собой дифференциальное уравнение вида:
dz |
|
|
τ2 |
|
ε( y x) |
или |
z ε ( y x)dτ |
||
|
||||
dτ |
||||
|
|
τ1 |
||
|
|
|
Равновесное (статическое) состояние такого объекта в момент времени [τ] возможно только при условии:
y[τ] = x[τ], тогда |
dz |
[τ] 0 и z[τ] = const |
|
d |
|||
|
|
dh
Для бака: ε(g1 g2 ) , dτ
где dh – скорость изменения уровня в баке, м/с; g1 – количество жид- d
кости, поступающей в бак за секунду, кг/с; g2 – количество жидкости,
отбираемой из бака за секунду, кг/с; ε |
1 |
– коэффициент передачи |
|
ρf |
|||
|
|
данного объекта (константа), м/кг, ρ – плотность жидкости, кг/м3, f – площадь сечения бака, м2.
Инерционные свойства такого объекта определяются численным значением коэффициента ε. Так, для примера с баком аккумулятором является объем бака V = f h, при этом, чем больше f, тем с меньшей скоростью будет изменяться уровень жидкости в баке при той же разнице притока и оттока ∆g = g1 – g2.
Взависимости от технологической схемы и режимов работы астатического объекта различают несбалансированный объект (неустойчивое звено) и сбалансированный объект (интегрирующее звено).
Вкачестве примера анализа свойств астатического несбалансированного объекта при разработке системы регулирования (САР) рассматривается бак-накопитель в системе водоснабжения предприятия. Параметрическая схема объекта на рис. 1, А. На схеме обозначены регулируемый параметр z – уровень в баке, канал управления y – включение и отключение насоса подачи воды в бак, возмущения x – отборы воды из бака для технологических потребностей.
Астатические, несбалансированные объекты в диапазоне варьирования переменных z, x, y являются звеном неустойчивым.
6
На рис. 1, Б приведены переходные (разгонные) характеристики такого объекта. При появлении рассогласования ∆ = y – x выходной параметр z начинает нарастать или убывать в зависимости от знака и величины рассогласования вплоть до предельных значений.
Астатическими, несбалансированными объектами автоматизации является также следующее оборудование:
–холодильная камера для хранения или заморозки продуктов. Регулируемый параметр z – температура воздуха в камере, канал управления y – включение и отключение компрессора холодильной установки, возмущения x – теплопритоки в объем воздуха камеры (инерционное звено) из продукта, через ограждения и т.п.;
–ресивер в комплексе подготовки сжатого воздуха для технологического процесса. Регулируемый параметр z – давление воздуха, в объеме ресивера (инерционное звено), канал управления y – включение и отключение воздушного компрессора, заполняющего ресивер, возмущения x – отборы сжатого воздуха из ресивера для технологических потребностей;
–бак для нагревания и выдержки при заданной температуре партии жидкости с подводом энергии от электронагревателя (ТЭНа). Регулируемый параметр z – температура продукта в баке (объем жидкости в баке – инерционное звено), канал управления y – включение и отключение электропитания ТЭНа, возмущения x – частичная или полная замена объема нагретой жидкости в баке на холодную, а также потери тепла в окружающую среду.
Динамические свойства сбалансированного астатического объекта определяются также дифференциальными уравнениями вида
dz |
|
|
τ2 |
|
ε( y x) |
или |
z ε ( y x)dτ |
||
|
||||
dτ |
||||
|
|
τ1 |
||
|
|
|
Особенностью сбалансированного объекта является возможность изменять управляющее воздействие y функционально в диапазоне варьирования y[τ] = y{ymin…ymax}, что позволяет получить на объекте статические (равновесные) состояния, при которых
y[τ] = x[τ]; |
dz |
[τ] 0 ; z[τ] = const. |
|
dτ |
|||
|
|
Вывод объекта в равновесное состояние может осуществлять функциональный регулятор, формирующий управляющее воздействие y.
7

В качестве примера астатических сбалансированных объектов в пособии рассматривается бак дозатора жидких компонентов в технологических циклах (рис. 2, А, Б). Регулируемый параметр z – уровень жидкости в баке, канал управления y – величина закрытия клапана подачи жидкости в бак, возмущения x – отбор жидкости из бака для технологических нужд. Статическое состояние такого объекта в момент времени [τ]:
dz |
[ ] 0 |
|
d |
||
|
возможно только при балансе притока и оттока: g1[τ] – g2[τ] = 0, при этом численное значение уровня в баке h[τ ] может принимать любое значение из диапазона варьирования: h[τ] =h{hmin…hmax}, в том числе,
hmin – бак пуст, hmax – бак полный.
На рис. 2 приведены также переходные характеристики объекта (h = f(τ)) при различных сочетаниях возмущающих g2 и управляющих g1 воздействий: g1 > g2, g1 = g2 и g1 < g2. Переходные характеристики соответствуют характеристикам интегрирующего звена [2].
Сбалансированными астатическими объектами являются также:
– бак для нагревания и выдержки при заданной температуре партии жидкости, подвод энергии от энергоносителя (пар, горячая вода) циркулирующего через «рубашку» или через змеевик, размещенный в баке. Регулируемый параметр z – температура жидкости в баке, канал управления y – величина закрытия клапана подачи энергоносителя в «рубашку», возмущения x – частичная или полная замена объема нагретой жидкости в баке на холодную, вызывающая изменение теплопритока от энергоносителя в объѐм бака, а также потери тепла в окружающую среду;
– установка насыщения воздухом, например, смеси зефирной массы или мороженного (взбивание). Регулируемый параметр z – плотность смеси на выходе из установки, канал управления y – величина закрытия клапана подачи сжатого воздуха в смеситель, возмущения x – изменения количества и плотности смеси на входе в установку.
8
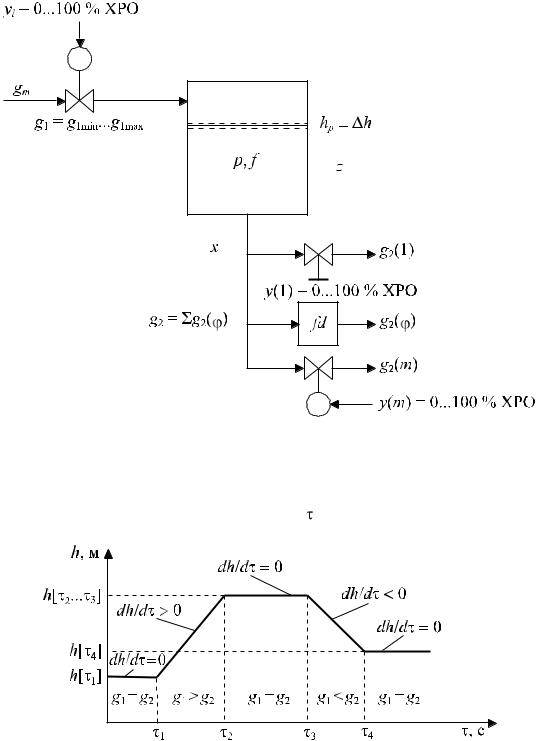
А. Параметрическая схема бака-дозатора |
Сбалансированный астатический объект |
z = const = h{hmin …hmax} (dz/d = 0), если y – x = 0 |
Б. Переходные процессы в сбалансированном астатическом объекте |
при изменениях возмущения g2 и управляющего воздействия g1 |
Рис. 2. Анализ состояний сбалансированного астатического объекта
9

АНАЛИЗ УСЛОВИЙ ЭКСПЛУАТАЦИИ НЕСБАЛАНСИРОВАННОГО АСТАТИЧЕСКОГО ОБЪЕКТА
На рис. 1 вариант использования астатического объекта в качестве бака-накопителя воды в системе водоснабжения предприятия из артезианской скважины.
Состояния объекта в динамике определяет уравнение:
dh
dτ ε(g1 g2 )
В этом случае возмущающее воздействие – отбор воды из бака может изменяться в широком диапазоне g2min < g2[τ] < g2max в зависимости от интенсивности производственного процесса на предприятии. Управляющее воздействие yp – подкачка воды из скважины в бак g1 осуществляется периодическими включениями электродвигателя насоса подкачки. Если yp = 1, то g1 = gn; если yp = 0, то g1 = 0, где yp команда включения/отключения электродвигателя насоса, gn производительность насоса, кг/с.
Для обеспечения оптимального режима эксплуатации системы водоснабжения следует установить насос с производительностью gn > g2max.
Отбор из бака-накопителя (g2, кг/с) может производиться насосами откачки или самотеком через открываемые запорные клапаны в количестве g2(j), необходимом для обеспечения работы j-го комплекта
оборудования. |
|
|
|
Максимальное возмущающее |
воздействие на объект |
|
m |
|
g2 max |
g2 ( j) , где m – число комплектов оборудования использую- |
|
|
j 1 |
|
щих воду на данном предприятии. |
|
|
|
Минимальное возмущение теоретически может быть нулевым |
|
g2min = 0, т. е. отбора воды из бака нет. |
|
|
|
Объект такого типа является несбалансированным астатиче- |
|
ским звеном. |
|
|
|
При эксплуатации объекта, в диапазоне варьирования перемен- |
|
ных, |
не обеспечиваются статические, |
равновесные состояния (не |
возможны состояния g1 = g2 когда dh/dτ = 0 и h = const).
На рис. 1 графики переходных процессов (h = ƒ(τ)) объекта (разгонных характеристик) при постоянном значении возмущающего воздействия g2 = 0,5gn и при изменении команды по каналу управле-
ния yp = 0 на yp = 1; yp = 1 на yp = 0.
10