Материал: Д6590 Данин ВБ Автоматизированные комплексы
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
САНКТ-ПЕТЕРБУРГСКИЙ НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ ИНФОРМАЦИОННЫХ ТЕХНОЛОГИЙ, МЕХАНИКИ И ОПТИКИ
ИНСТИТУТ ХОЛОДА И БИОТЕХНОЛОГИЙ
В.Б. Данин, В.А. Каткова, А.С. Пастухов
АВТОМАТИЗИРОВАННЫЕ КОМПЛЕКСЫ ТЕХНОЛОГИЧЕСКОЙ ПОДГОТОВКИ ПРОИЗВОДСТВА
Учебно-методическое пособие
Санкт-Петербург
2012

УДК 681.5
Данин В.Б., Каткова В.А. Пастухов А.С. Автоматизированные комплексы технологической подготовки производства: Учеб.-метод. пособие. СПб.: НИУ ИТМО; ИХиБТ, 2012. 56 с.
Рассматриваются методы и практические приемы системного анализа технологических объектов. Цель анализа состоит в подготовке алгоритмов управления технологическим объектом и моделировании системы управления рассматриваемого технологического объекта. Изложены методические указания по выполнению контрольных заданий и курсовому проектированию для студентов, обучающихся по специальности 220301 и направлениям бакалавриата и ма-
гистратуры 220200, 220700.
Рецензент: доктор техн. наук, проф. Г.А. Кондрашкова
Рекомендовано к печати редакционно-издательским советом Института холода и биотехнологий
В 2009 году Университет стал победителем многоэтапного конкурса, в результате которого определены 12 ведущих университетов России, которым присвоена категория «Национальный исследовательский университет». Министерством образования и науки Российской Федерации была утверждена программа его развития на 2009–2018 годы. В 2011 году Университет получил наименование «Санкт-Петербургский национальный исследовательский университет информационных технологий, механики и оптики».
© Санкт-Петербургский национальный исследовательский университет информационных технологий, механики и оптики, 2012
© Данин В.Б., Каткова В.А., Пастухов А.С., 2012
ВВЕДЕНИЕ
Технологические процессы пищевых производств реализуются, как правило, в виде сложных технологических комплексов, включающих в себя взаимосвязанные различные аппараты и оборудование. Автоматизация таких аппаратов и оборудования требует этапа структур- но-параметрического анализа.
Параметрический анализ объекта управления или отдельного звена, входящего в структуру объекта, выполняется с целью определения всех параметров, подлежащих контролю или управлению по ходу реализации технологического процесса (операции). Объект управления находится под воздействием переменных факторов – возмущений, которые через объект вызывают отклонение качественного параметра ±∆Z(i) от нормативных значений.
При параметрическом анализе целесообразно выделить группу неуправляемых воздействий на объект Х(γ), где γ = 1…m – индекс неуправляемого воздействия, и группу управляемых воздействий Y(j), где j = 1…k – индекс управляемых воздействий.
Структурный анализ объекта проводится для определения внутренних связей между элементами технологического комплекса. При проведении структурного анализа сложный объект представляют в виде структурной схемы, состоящей из элементарных звеньев, связанных между собой параметрами Zn(i), Xn(γ), Yn(j), определяющими состояние каждого n-го звена, входящего в структурную схему [1].
В данном учебно-методическом пособии рассмотрены два возможных варианта объектов астатического типа: несбалансированный и сбалансированный объекты на основе бака-накопителя для пищевого предприятия.
Подробно разобрана последовательность анализа схем дозаторов и зависимости показателей качества от возмущающих воздействий Х(γ), что дает возможность получать различные виды переходных процессов, анализируя которые возможно рассчитать реально проектируемые объекты управления.
Для моделирования конкретного задания используется диск с программным обеспечением (прил. 1). Текст программы-шаблона REGAST2.bas, работающей в среде QBASIC. В преамбуле прил. 1 и в комментариях по тексту программы имеются пояснения о последовательности работы с программой.
3

Подготовленный шаблон можно использовать для формирования разгонных характеристик астатических объектов.
Программа также позволяет произвести на модели проверку результатов выбора параметров настройки функционального регулятора (ПИД) для заданного диапазона изменения производственных ситуаций. Вычисления по программе по методу численного интегрирования, обеспечивает формирование переходных характеристик системы автоматического регулирования при различных возмущениях и настройках регулятора.
Задания на выполнение самостоятельной и контрольной работ представлены в прил. 2, 3.
ПАРАМЕТРИЧЕСКИЙ АНАЛИЗ АСТАТИЧЕСКОГО ОБЪЕКТА
Рассмотрим свойства астатического объекта на примере емкости (бака), наполняемой и опорожняемой жидкостью (рис. 1, А). Численное значение регулируемого параметра z в таких объектах (уровень жидкости в баке h, м) не определяется однозначно численными значениями как возмущающего воздействия на объект x (отбор жидкости из бака g2, кг/с), так и управляющего воздействия на объект y (пополнение бака жидкостью, g1, кг/с).
Количество жидкости в баке G, кг:
G = ρ f h
где ρ – плотность жидкости, кг/м3; f – площадь сечения бака, м3; h – уровень жидкости в баке, м.
Отсюда
dG ρf dh . dτ dτ
Приращение количества жидкости в баке за промежуток време-
ни Δτ, с:
|
|
G = (g1 – g2) Δτ. |
|
|
|
|||||||
Отсюда |
|
|
|
|
|
|
|
|
|
|
|
|
|
dG |
(g g |
|
) и |
|
dh 1 |
(g g |
|
) . |
|||
|
|
2 |
|
|
|
|
|
2 |
||||
|
dτ |
1 |
|
|
dτ ρf |
1 |
|
|||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
4 |
|
|
|
|
|
|
|
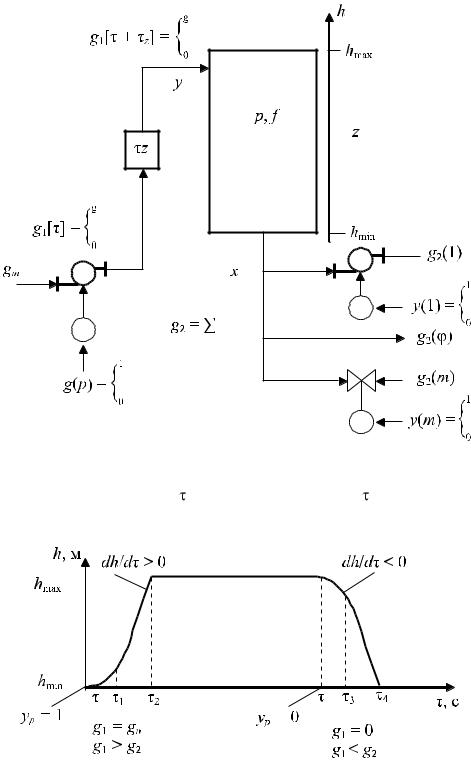
А. Параметрическая схема бака накопителя. Несбалансированный объект, если yp = gn то dz/d > 0 ; если yp = 0 то dz/d < 0
z |
z |
Б. Переходные характеристики объекта при g2 = const; yp = 1 (g1 = gn) и yp = 0 (g1 = 0)
Рис. 1. Анализ состояний несбалансированного астатического объекта
5