Материал: Д6590 Данин ВБ Автоматизированные комплексы
На графиках также отражено запаздывание на τz, с, по каналу реализации команды управления:
Если yp[τ] = 1, то g1[τ + τz] = gn; Если yp[τ] = 0, то g1[τ + τz] = 0.
Представленные на рис. 1, Б графики соответствуют переходным характеристикам реального астатического (неустойчивого) звена.
В системах автоматического регулирования (САР) несбалансированных астатических объектов используют позиционные законы (ПЗ) регулирования, так как устойчивую работу такого объекта (удержание уровня в баке в заданных пределах) можно обеспечить только периодическими переключениями по каналу управления (включение и отключение насоса).
Для выбора оптимальной настройки САР с ПЗ регулятором следует провести параметрический анализ объекта:
1.Анализ регулируемого параметра (отклика), z. Определить численные значения контрольных точек для всех возможных производственных ситуаций. Определить необходимую погрешность стабилизации z и требования к величине статической ошибки регулируемой величины по амплитуде в режиме установившихся колебаний.
2.Анализ возмущающих воздействий x(n). Определить диапазон варьирования для каждого неуправляемого возмущающего воздействия. Определить возможность и периодичность их одновременного изменения. Определить уравнение связи возмущения x(n) и скорости изменения отклика (регулируемого параметра z).
3.Анализ каналов управления объектом y. Определить способ воздействия на объект с целью изменения знака отклонений отклика z под влиянием возмущений x(n). Определить возможный диапазон варьирования y при управлении объектом. Определить уравнения связи управляющего воздействия y и скорости изменения отклика z.
Результаты такого анализа могут быть оформлены в виде таблицы информационного обеспечения.
Для лучшего понимания алгоритма анализа объекта предварительно рассмотрим графики переходных процессов формируемые при работе САР ПЗ регулирования бака накопителя.
На рис. 3, А, Б представлены графики, определяющие изменение во времени численных значений регулируемого параметра h, м, возмущающего воздействия g2, кг/с, команды формируемой регулято-
11
ром yp (0,1), управляющего воздействия на объект g1, кг/с при работе контура САР ПЗ-регулирования.
На рисунке рассмотрены результаты работы контура для двух состояний объекта:
А – при постоянной нагрузке на объект g2nom = 0,5gn принятой за номинальное значение (начальная точка для отсчѐта отклонений возмущений);
Б – при малом потреблении воды из бака g2 = 0,1gn. На графике обозначены:
hpo, м – начальная точка для отсчѐта отклонений регулируемого параметра;
hpw, м – численное значение уровня при достижении которого подаѐтся команда на выключение насоса yp = 0;
hpl, м – численное значение уровня при достижении которого подаѐтся команда на включение насоса yp = 1.
В момент времени 1, при h[ 1] = hpl, подаѐтся команда с выхода регулятора yp = 1 на включение насоса. С задержкой по времени z = 2
–1 количество воды подающейся в бак насосом устанавливается на
уровне g1[ 2] = gn. На отрезке времени 3 – 2 включѐн насос и происходит наполнение бака водой.
Скорость увеличения уровня в баке:
– для режима рис. 3, А:
dh |
ε(g |
g |
|
) = |
|
dh |
|
ε(g |
|
0,5g |
|
) |
= |
|
dh |
ε |
0,5g |
|
= (hpw – hpl)/( 3 – |
2); |
||
dτ |
1 |
|
2 |
|
|
dτ |
|
|
n |
n |
|
|
|
dτ |
|
|
|
n |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
– для режима рис. 3, Б: |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
dh |
ε(g |
g |
|
) = |
dh |
|
ε(g |
|
0,1g |
) |
= |
dh |
|
ε |
0,9 g |
|
|
= (hpw – hpl)/( 3 – |
2). |
|||
|
2 |
|
|
n |
|
n |
||||||||||||||||
dτ |
1 |
|
|
|
d |
|
|
n |
|
|
|
dτ |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
В момент времени |
|
3, при h[ |
3] = hpw, подаѐтся команда с выхо- |
||||||||||||||||||
да регулятора yp = 0 на выключение насоса. С задержкой по времени z = 4 – 3 количество воды подающейся в бак насосом устанавливается на уровне g1[ 4] = 0. На отрезке времени 5 – 4 выключен насос
и происходит опорожнение бака. Скорость снижения уровня в баке:
– для режима рис. 3, А:
|
dh |
ε(g |
|
g |
|
) = |
dh |
ε( |
0,5g |
|
) = |
dh |
ε0,5g |
|
= (hpw – hpl)/( 5 – 4); |
|||||||||
|
|
|
|
2 |
|
|
n |
|
|
n |
||||||||||||||
|
dτ |
1 |
|
|
|
|
|
dτ |
|
|
|
|
|
dτ |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
– для режима рис. 3, Б: |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
dh |
ε(g |
g |
|
) = |
dh |
|
ε( |
0,1g |
) |
= |
dh |
|
ε0,1g |
|
= (hpw – hpl)/( 5 – |
4). |
||||||||
|
|
|
2 |
|
|
|
|
n |
||||||||||||||||
dτ |
1 |
|
|
|
|
dτ |
|
n |
|
|
|
dτ |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
||
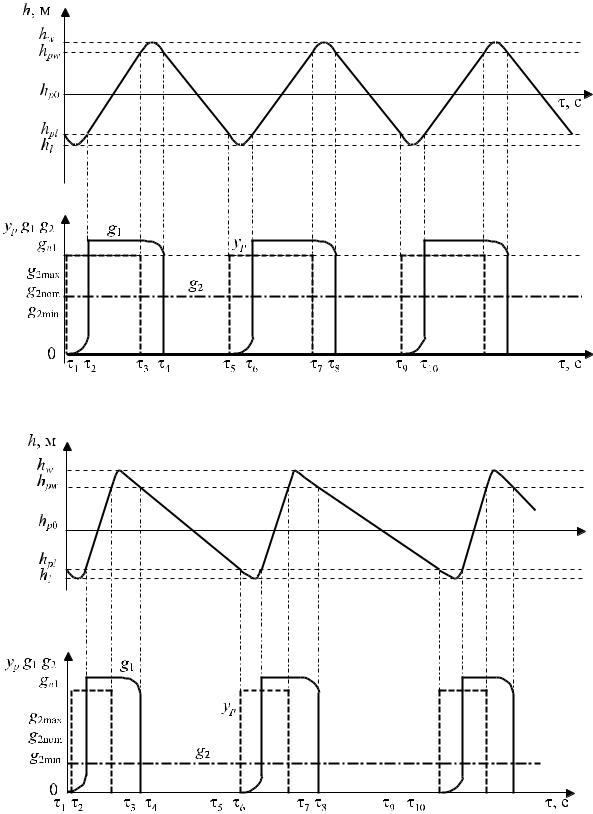
А. Работа САР при номинальной нагрузке g2nom = g2min + 0,5(g2max – g2min}, например, g2nom = 0,5gn
Б. Работа САР при минимальной нагрузке, например, g2min = 0,1gn. Рис. 3. Графики изменения во времени параметров при ПЗ-регулировании
бака-накопителя
13
В момент времени 5, при h[ 5] = hpl, подаѐтся команда с выхода регулятора yp = 1 на включение насоса и цикл повторяется. На графиках рис. 3 отражены динамические забросы регулируемой величины до значения hw, м при заполнении бака, и до значения hl, м при опорожнении. Величина заброса определяется запаздыванием τz исполнения команды по каналу управления объектом, а также скоростью изменения уровня в режиме переключения.
Основными показателями оптимальности настройки ПЗрегулятора являются:
«статическая ошибка» – положительная ahw = hw – hp0 и отрицательная
ahl = hp0 – hl амплитуда отклонения регулируемого параметра в колебательном режиме от значения принятого за номинал; время цикла c = 5 – 1, сек, либо частота wc = 1/( 5 – 1), 1/сек, определяющие периодичность колебаний численного значения регулируемого параметра относительно номинала hp0.
При настройке ПЗ-регулятора величину статической ошибки можно уменьшить приближением уставок регулятора hpw и hpl к номинальному значению hp0, но при этом увеличится частота переключений wc, что приведѐт к сокращению ресурса технических средств САР. Анализируя объект, необходимо оценить предельно допустимые отклонения регулируемой величины с учѐтом динамического заброса при всех возможных для данного объекта производственных ситуациях (для бака это
изменение потребления воды из бака в диапазоне g2min … g2max).
Так как объект в переходном процессе является неустойчивым звеном, то необходимо предусмотреть сигнализацию или защиту на случай отказа исполнительных устройств в контуре ПЗ-регулирования (для бака отказ включения насоса приведѐт к полному опорожнению, отказ выключения приведѐт к переполнению).
АНАЛИЗ ПРОИЗВОДСТВЕННЫХ СИТУАЦИЙ ПРИ ЭКСПЛУАТАЦИИ БАКА-НАКОПИТЕЛЯ
В этом разделе рассматриваются условия реализации ПЗ САР бака-накопителя в системе водообеспечения малого предприятия. В табл. 1 приведены результаты параметрического анализа баканакопителя в системе водообеспечения предприятия.
14

|
|
|
|
Таблица 1 |
|
Результаты параметрического анализа бака-накопителя |
|||||
|
|
|
|
|
|
Обозначение |
Наименование |
Значение параметров |
|||
и размерность |
параметров |
nom |
min |
|
max |
|
Константы |
|
|
|
|
h, м |
Высота бака |
6 |
|
|
|
f, м2 |
Площадь бака |
10 |
|
|
|
V, м3 |
Объем бака |
60 |
|
|
|
Gв, кг |
Количество воды в баке |
30·103 |
|
|
|
, кг/м3 |
Плотность жидкости |
103 |
|
|
|
ε = 1/ρf |
Коэффициент передачи, м /кг |
10–4 |
|
|
|
dm,м |
Диаметр и длина заполняемой |
0,12 |
|
|
|
|
части |
|
|
|
|
lm, м |
магистрали насос-бак |
100 |
|
|
|
Vm= 0,25πdm2lm, м3 |
Объем заполняемой магистрали |
1,13 |
|
|
|
|
Анализ возмущений x |
|
|
|
|
g2(1), кг/с |
Расход воды из бака по каналу 1 |
10 |
0 |
|
20 |
g2(2), кг/с |
Расход воды из бака по каналу 2 |
10 |
0 |
|
20 |
g2(3), кг/с |
Расход воды из бака по каналу 3 |
10 |
0 |
|
20 |
g2(4), кг/с |
Расход воды на сантехнические |
10 |
5 |
|
15 |
|
нужды |
|
|
|
|
Σg2, кг/с |
Суммарный расход воды |
40 |
5 |
|
75 |
|
из бака |
|
|
|
|
|
Анализ управляющих воздействий y |
|
|
|
|
gn, кг/с |
Поступление воды в бак |
|
|
|
|
|
(производительность насоса) |
80 |
0 |
|
80 |
|
Динамические характеристики |
|
|
|
|
dh/dτ = ε(–Σg2), |
Скорость изменения уровня |
– 4·10–3 |
– 0,5·10–3 |
|
– 7,5·10–3 |
м/с |
при сливе |
|
|
|
|
dh/dτ = ε(gh–Σg2), |
Скорость изменения уровня при |
4·10–3 |
7,5·10–3 |
|
0,5·10–3 |
м/с |
наливе |
|
|
|
|
τz = ρVm/gn, c |
Время запаздывания по каналу |
(14,13) |
(14,13) |
|
(14,13) |
|
управления |
20 |
20 |
|
20 |
hd = (dh/dτ)τz, м |
Динамический заброс уровня |
0,08 |
0,15 |
|
0,01 |
|
(налив) |
|
|
|
|
При эксплуатации бака-накопителя в системе водоснабжения не предъявляется особых требований к точности стабилизации уровня в баке, что позволяет выбрать настройку переходных характеристик ПЗ-регулятора на режим устойчивых колебаний с большой амплитудой колебаний, а это, в свою очередь, обеспечит наименьшую частоту включения/отключения электродвигателя насоса и увеличение срока эксплуатации объекта. Таким образом, основными параметром
15