Материал: Д6590 Данин ВБ Автоматизированные комплексы
Одним из наиболее нагруженных элементов в контуре САР является магнитный пускатель электропривода насоса. В технических характеристиках пускателей типа ПМ гарантируется работоспособность прибора до lp = 1,5·106 циклов переключений. При выбранной настройке ПЗ-регулятора ресурс пускателя может быть израсходован через
Tp = lp p = 1,5·106·0,43 = 6,45·105 ч.
СТРУКТУРА И МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ СИСТЕМЫ ПРОПОРЦИОНАЛЬНОГО ЗАКОНА РЕГУЛИРОВАНИЯ
Структурно-параметрическая схема контура реализации ПЗрегулирования рис. 4 рассматривается на примере регулирования уровня в баке-накопителе (несбалансированный астатический объект).
В схеме предусмотрена сигнализация при переполнении и опорожнении бака.
Рис. 4. Структурная схема позиционной САР
21

На схеме рис. 4 обозначены: ОУ – объект управления.
z – переменная, формируемая на выходе объекта (регулируемый параметр);
x – неуправляемое возмущающее воздействие на объект; y – управляемое воздействие на объект.
Д – датчик.
ИП – измерительный преобразователь.
z(i) – численное значение результата измерения регулируемого параметра.
ЗУ – задающее устройство.
zu – ввод задания (уставок) регулятору (см. табл. 1);
zp(i), (где i =1 …n) – численное значение i-ой уставки регулятору (условие перехода по программе).
БК – блок компаратора, реализация логических операций Log1 (контроль моментов перехода по программе; см. табл. 2).
ai = {10 , (где i = 1 …n) – команда перехода по программе при
наступлении zp(i)-го условия. БУ – блок управления:
–реализация логических операций Log2 (формирование алгоритма ПЗ-регулирования);
–реализация логических операций Log3 (формирование алгоритма аварийной сигнализации);
yp = {10 – команда управления объектом формируемая регуля-
тором;
ysl = {10 – команда вкл/откл аварийной сигнализации НИЖ-
НИЙ УРОВЕНЬ;
ysw = {10 – команда вкл/откл аварийной сигнализации ВЕРХ-
НИЙ УРОВЕНЬ.
АН, АВ – информационные табло о выходе в аварийную зону.
22
УУ– устройство изменения управляемого воздействия на объект (например, магнитный пускатель электропривода насоса).
yl = {10 –команда формируемая устройством управления ..
ИУ – исполняющее устройство (например, насос с электроприводом).
y*τ+ – численное значение управляющего воздействия на выходе из ИУ (например, количество воды подаваемой насосом) в момент времени [τ].
y*τ+ = {y0n , где yn – производительность насоса
ТЗ – звено запаздывания (например, объѐм трубопровода от насоса до бака)
y [τ+ τz] – численное значение управляющего воздействия на входе в объект (например, количество воды подаваемой в бак) в момент времени [τ+ τz];
y*τ+ = {y0n , где yn –производительность насоса, τz – время запаз-
дывания, с.
Математическое описание функций структурных звеньев ПЗ САР
Объект.
(например, бак-накопитель системы водоснабжения)
|
dz |
|
τ2 |
|
|
ε( y |
x) или z ε ( y x)dτ ; |
||
|
|
|
||
|
dτ |
|||
|
|
τ1 |
||
|
|
|
|
|
для бака: |
|
|||
|
dh |
ε(g1 |
g2 ) , |
|
|
|
|
||
|
dτ |
|||
|
|
|
||
где dhd – скорость изменения уровня в баке, м/с; g1 – количество жид-
кости, поступающей в бак за секунду, кг/с; g2 – количество жидкости,
отбираемой из бака за секунду, кг/с; ε |
1 |
– коэффициент передачи |
|
ρf |
|||
|
|
данного объекта (константа), м/кг, ρ – плотность жидкости, кг/м3, f – площадь сечения бака, м2.
23
Измерительный преобразователь
Масштабирование измеренного значения регулируемого параметра с использованием тарировочной характеристики датчика:
z(i) = kd·z,
где z(i) – численное, размерное значение результата измерения параметра, например, уровень воды в баке h, м из диапазона измерения датчика, например, h = 0 …6, м; z – численное значение унифицированного сигнала поступившего от датчика, например, значение тока из диапазона z = 4…20, µA; kd = h/ z, м/µA – масштабный коэффициент датчика.
Блок компаратора
Анализирует результаты измерения z(i), формирует команды перехода по программе предусмотренные в табл. 2.
В компараторе реализуется блок логических операций Log1:
ЕСЛИ z(i) ≤ z1 |
ТО a1 = 1 |
ИНАЧЕ a1 = 0: |
ЕСЛИ z(i) ≥ z2 |
ТО a2 = 1 |
ИНАЧЕ a2 = 0: |
ЕСЛИ z(i) ≥ z3 |
ТО a3 = 1 |
ИНАЧЕ a3 = 0: |
ЕСЛИ z(i) ≥ z4 |
ТО a4 = 1 |
ИНАЧЕ a4 = 0: |
Блок управления
1. Формирует команды управления объектом по алгоритму ПЗрегулирования (реализация логических операций Log2);
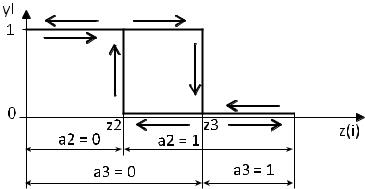
Диаграмма работы блока при реализации ПЗ-закона регулиро-
вания.
Рис. 5. Реализация логических операций Log2 |
24
В блоке Log2 реализуются логические операций формирования управляющих воздействий ПЗ-регулятора:
ЕСЛИ a2 = 0 И a3 = 0 ТО yp = 1 ЕСЛИ a2 = 1 И a3 = 1 ТО yp = 0:
yl = yp (сохранение сформированной команды).
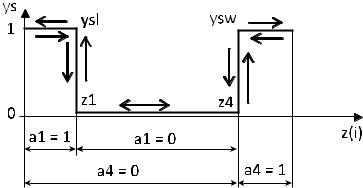
2. Формирует алгоритм аварийной сигнализации (реализация логических операций Log3).
Диаграмма работы блока аварийной сигнализации показана на
рис. 6.
Рис. 6. Реализация логических операций Log3 |
В блоке Log3 реализуются логические операции:
ЕСЛИ a1 = 1 ТО ysl = 1 ИНАЧЕ ysl = 0 ЕСЛИ a4 = 1 ТО ysw = 1 ИНАЧЕ ysw = 0
Устройство изменения управляемого воздействия на объект
(например,магнитный пускатель электропривода насоса). Реализует логическую операцию Log4
ЕСЛИ yp*τ+ = 1 ТО yl = 1 (команда включения насоса) ЕСЛИ yp*τ+ = 0 ТО yl = 0 (команда выключения насоса)
Исполняющее устройство
(например, насос с электроприводом). Реализует логическую операцию Log5
ЕСЛИ yl*τ+ = 1 ТО y [τ] = yn (производительность насоса)
ЕСЛИ yl*τ+ = 0 ТО y [τ] = 0.
Звено запаздывания
(например, объѐм трубопровода от насоса до бака)
ЕСЛИ y*τ+ = yn ТО y [τ+ τz] = yn (производительность насоса) ЕСЛИ y*τ+ = 0 ТО y [τ+ τz] = 0, (τz – время запаздывания, с).
25