Материал: Д6590 Данин ВБ Автоматизированные комплексы
настройки ПЗ-регулятора являются уставки – численные значения регулируемой величины, при достижении которых формируется управляющее воздействие на объект. Для бака-накопителя необходимо выбрать значение уставки h[ ] = hpl, м, при снижении уровня до этого значения подается команда на включение насоса подкачки yp = 1, и значение h[ ] = hpw, м, при повышении уровня до которого выключается насос подкачки yp = 0.
Втабл. 1 внесены константы – конструктивные характеристики объекта и параметры среды, необходимые для проведения расчетов.
Вразделе анализа возмущающих воздействий на объект выявлены каналы, по которым отбирается вода из бака. В табл. 1 внесены три линии водоснабжения отдельных технологических комплексов предприятия, которые функционируют в период производства продукции и при этом потребление воды в каждой линии может существенно изменяться, а также линия подачи воды в систему санитарного обслуживания предприятии.
Для каждого канала определены номинальные значения:
g2nom(1) = 10 кг/с; g2nom(2) = 10 кг/с; g2nom(3) = 10 кг/с; g2nom(4) = 10 кг/с;
диапазоны варьирования:
g2min(1) = 0; g2max(1) = 20 кг/с; g2min(2) = 0; g2max(2) = 20 кг/с; g2min(3) = 0; g2max(3) = 20 кг/с; g2min(4) = 5 кг/с; g2max(4) = 15 кг/с;
Определены суммарное возмущающее воздействие на объект и диапазон варьирования при различных производственных ситуациях:
|
4 |
g2nom = |
g2nom (γ) = 10 + 10 + 10 + 10 = 40 кг/с; |
|
γ 1 |
|
4 |
g2min = |
g2min (γ) = 0 + 0 + 0 + 5 = 5 кг/с; |
|
γ 1 |
|
4 |
g2max = |
g2max (γ) = 20 + 20 + 20 + 15 = 75 кг/с. |
|
γ 1 |
Выбрано значение управляющего воздействия на объект g1 = gn. С целью обеспечения симметрического колебательного режима при отклонениях потребления воды из бака в положительную и отри-
цательную сторону при номинальной нагрузке выбрана производительность насоса подкачки:
gn = 2g2nom = 80 кг/с.
При этом выполняется условие:
gn > g2max.
16
Определены параметры переходного процесса в объекте при различных производственных ситуациях:
Скорость изменения уровня в баке при номинальной нагрузке
g2nom = 40 кг/с:
– при накачке воды включенным насосом gn = 80 кг/с
dh |
|
1 |
(gn g2nom ) = |
|
1 |
|
(80 – 40) = 4·10–3 |
м/с; |
dτ |
|
ρf |
103 |
10 |
||||
|
|
|
|
|||||
– при сливе (насос выключен)
dh 1 ( g2nom ) = – 4·10–3 м/с. dτ ρf
Скорость изменения уровня в баке при минимальной нагрузке
g2min = 5 кг/с:
– накачка (насос включен, gn =80 кг/с)
|
dh |
10–4(80 – 5) = 7,5·10–3 м/с; |
|
dτ |
|
|
|
|
– слив (насос выключен) |
||
|
dh |
10–4(– 5) = – 0,5·10–3 м/с. |
|
dτ |
|
|
|
|
Скорость изменения уровня в баке при максимальной нагрузке
g2max = 75 кг/с:
– накачка (насос включен, gn = 80 кг/с)
|
dh |
10–4(80 – 75) = 0,5·10–3 м/с; |
|
d |
|
|
|
|
– слив (насос выключен) |
||
|
dh |
10–4(– 75) = – 7,5·10–3 м/с; |
|
d |
|
|
|
|
Произведена оценка численного значения времени запаздывания (τz, с) по каналу формирования управляющего воздействия g1, кг/с на объект.
За время запаздывания принимается промежуток времени от момента подачи команды на включение насоса yp[τ] = 1 до момента поступления полного потока воды в бак g1[τ + τz] = gn, кг/с. Численное значение τz в основном определяется объемом магистрали насос – бак, который освобождается за счет свободного слива воды при выключении насоса.
Если трубопровод dm = 0,12 м2 и при включении насоса необходимо заполнить отрезок трубы длиной lm = 100 м, то
17

z = (0,25πdm2lmρ)/gn = (0,25·3,14·0,122·100·103)/80 = 14,13 20 с.
Численное значение времени запаздывания при выключении насоса принимаем таким же, как и для включения.
Произведена оценка численного значения динамического заброса уровня в баке при различных производственных ситуациях.
При номинальной нагрузке g2nom = 40 кг/с скорость изменения уровня в баке dh/dτ = 4·10–3 м/с, при этом дополнительное отклонение
уровня за время запаздывания τz = 20, с составит hd = (dh/dτ)τz = = 4·10–3·20 = 0,08 м.
Максимальный динамический заброс в сторону увеличения уровня (при наливе) будет наблюдаться при выключения насоса в ре-
жиме максимальной нагрузки g2max = 75 кг/с: hd = 7,5·10–3·20 = 0,15 м.
В результате анализа требований к изменению регулируемого параметра h, м – уровню воды в баке выбраны численные значения контрольных точек в диапазоне варьирования (параметры настройки ПЗ-регулятора).
При общей высоте бака hв = 6 м и площади сечения fв = 10 м2 определены верхняя и нижняя аварийные зоны:
hsw >= 5,5 м и hsl <= 1,5 м.
Выход в верхнюю зону возможен, если произошел отказ при выключении насоса подкачки. Серьезных последствий такая авария не вызовет (избыток воды уходит через переливную трубу), однако, по аварийному сигналу необходимо операторным способом отключить насос во избежание ненужных затрат энергии, поэтому аварийная верхняя зона не велика hв – hsw = 0,5 м . Можно оценить промежуток времени за который оператор при попадании в эту зону должен отключить насос:
sw = (hв – hsw)/(dh/dτ) = 0,5/4·10–3 = 125 с.
Выход в аварийную нижнюю зону возможен при отказе автоматического включения насоса подкачки или при срыве потока воды в бак. Такой отказ требует оперативного вмешательства, так как может произойти полный слив воды из бака и прекращение подачи воды в действующее технологическое оборудование, продукция пойдет в брак.
При назначении границы аварийной нижней зоны учитывают также требования потребителей к численному значению напора (давления) в магистрали подачи воды (hg, м вод. ст.). Необходимо обеспечить:
18

hsl + hb0 >= hg,
где hb0, м – высота подъѐма бака над технологическим оборудованием. Аварийная нижняя зона увеличена до hsl = 1,5 м.
Временной промежуток, за который необходимо реализовать меры по снижению последствий аварийного выхода в нижнюю зону:
sl = hsl/(dh/dτ) = 1,5/7,5·10–3 = 200 с.
Верхнюю и нижнею границы диапазона варьирования амплитуды колебаний уровня в переходном процессе ПЗ-регулирования (hw и hl) целесообразно максимально приблизить к аварийным границам с целью сокращения частоты включения насоса при работе ПЗ регулятора. Для анализируемого объекта необходимо принято обеспечить:
hw < hsw = 5,5, м hl > hsl = 1,5 м.
Назначается номинальное значение уровня в баке как середина диапазона варьирования:
hp0 = hl + 0,5 (hw – hl) = 3,5 м.
Верхнюю hpw и нижнюю hpl уставки границы регулирования необходимо выбрать таким образом, чтобы при любых производственных ситуациях амплитуда колебаний уровня воды в баке не выходила за пределы назначенного диапазона варьирования hw = 5,5 м;
hl = 1,5 м.
С учетом максимального динамического заброса hd = 0,15 м (см. табл. 1) определено:
hpw |
hw – hd = 5,5 – 0,15 |
5,35 м; |
hpl |
hl + hd =1,5 + 0,15 |
1,65 м. |
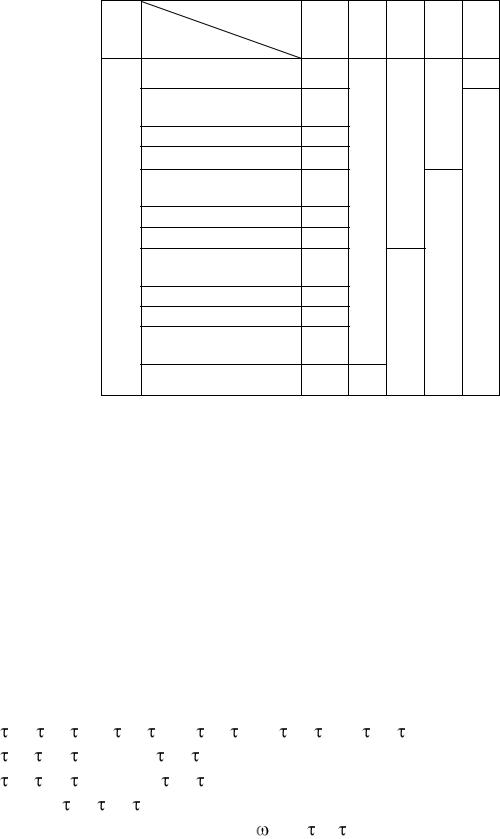
Принимаем параметры настройки регулятора hpw = 5 м, hpl = 2 м. Результаты выбора контрольных значений регулируемого па-
раметра (уровня в баке накопителе) оформлены в табл. 2 в виде матрицы для настройки компаратора при реализации ПЗ САР. В табл. 2 a1, a2, a3, a4 дискретные сигналы, которые формируют логические условия перехода по программе управления объектом.
В компараторе реализуются логические операции:
ЕСЛИ h(i) ≤ hl ТО a1 = 1 ИНАЧЕ a1 = 0; ЕСЛИ h(i) ≥ hpl ТО a2 = 1 ИНАЧЕ a2 = 0; ЕСЛИ h(i) ≥ hpw ТО a3 = 1 ИНАЧЕ a3 = 0; ЕСЛИ h(i) ≥ hw ТО a4 = 1 ИНАЧЕ a4 = 0.
19
|
|
|
|
Таблица 2 |
|
Контрольные значения регулируемого параметра |
|||||
|
Отклики |
|
|
|
|
h,м |
Уставка |
a1 |
a2 |
a3 |
a4 |
|
|
|
|
|
|
6 |
|
|
|
|
1 |
5,5 |
Верхнего аварийного |
hw |
|
|
|
|
уровня |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
1 |
|
5 |
Отключения |
hpw |
|
|
|
|
насоса |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
1 |
|
|
2 |
Включения |
hpl |
|
|
|
|
насоса |
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
|
|
|
1,5 |
Нижнего аварийного |
hl |
|
|
|
|
уровня |
|
|
|
|
0 |
|
1 |
|
|
|
Оценка качества работы системы пропорционального |
|||||
закона регулирования бака-накопителя |
|||||
Представленные выше расчѐты позволяют оценить основные характеристики качества работы системы ПЗ-регулирования в различных производственных ситуациях.
При номинальной нагрузке g2nom = 40 кг/с (см. рис. 3, А). Амплитуда установившихся колебаний переходного процесса
по отношению к номинальному значению уровня hp0, м (статическая ошибка):
ahw = hw – hp0 = (hpw + hd) – hp0 = (5 + 0,15) – 3,5 = 1,55 м ahl = hp0 – hl = hp0 – (hpl + hd) = 3,5 – (2 + 0,15) = 1,35 м.
Время цикла установившихся колебаний:
p = 5 – |
1 = ( 2 – 1) + ( 3 – 2) + ( 4 – 3) + ( 5 – 2), |
||||
2 – |
1 |
= |
zl = 20, с; |
3 – |
2 = (hpw – hpl)/(dh/dτ) = (5 – 2)/4·10–3 = 750 с, |
4 – |
3 |
= |
zw = 20, с; |
5 – |
2 = (hpw – hpl)/(dh/dτ) = (5 – 2)/4·10–3= 750 с, |
откуда |
p = 5 – 1 = 1540 с (0,43 ч). |
||||
|
|
Частота переключений =1/( 5+ 1) = 6,5·10–4 1/с |
|||
|
|
|
|
|
20 |