Материал: Д6590 Данин ВБ Автоматизированные комплексы
СТРУКТУРНАЯ СХЕМА ФУНКЦИОНАЛЬНОЙ СИСТЕМЫ РЕГУЛИРОВАНИЯ
Как отмечено выше, при создании САР сбалансированных астатических объектов следует выбрать функциональный закон регулирования, содержащий интегральную составляющую (ПИ, ПИД), который обеспечивает поддержание (стабилизацию) регулируемого параметра в статическом режиме вблизи уставки (hp, м) без статической ошибки. Необходимо также выбрать параметры настройки регулятора, которые обеспечат работоспособность системы при изменении производственных ситуаций, например, при изменении численных значений возмуща-
ющих воздействий в диапазоне варьирования g2min < g2[τ]<g2max, кг/с.
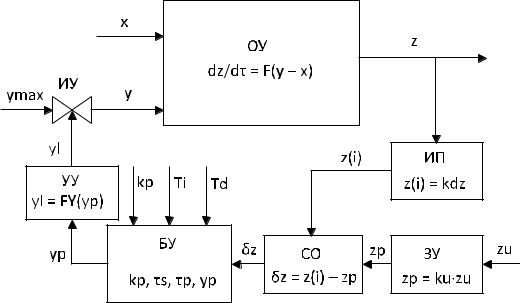
На рис. 8 представлена структурно-параметрическая схема контура САР, реализующая ПИД закон регулирования для сбалансированного астатического объекта.
Рис 8. Структурно-параметрическая схема функциональной САР
На этой схеме обозначены основные модули, образующие структуру САР, входные и выходные переменные контура и отдельных модулей, а также параметры настройки регулятора:
ОУ – объект управления:
z – переменная, формируемая на выходе объекта (регулируемый параметр);.
36
x – неуправляемое возмущающее воздействие на объект; y – управляемое воздействие на объект.
ИП – измерительный преобразователь (датчик):
z(i) – численное значение результата измерения регулируемого параметра.
ЗУ – задающее устройство:
zu – ввод задания (уставки) регулятору;
zp – численное значение уставки регулятору. СО – блок вычисления сигнала ошибки:
δz – численное значение сигнала ошибки. БУ – блок управления (регулятор).
Численные значения параметров настройки регулятора:
kp – коэффициент усиления или xp = 1/kp – полоса пропорциональности;
s, с – постоянная времени интегрирования;
p, с – постоянная времени дифференцирования;
yp – численное значение команды управления формируемой регулятором.
УУ – устройство изменения управляемого воздействия на объект (исполнительный механизм):
yl – численное значение команды управления формируемой исполнительным механизмом.
ИУ – исполняющее устройство (регулирующий клапан):
y – численное значение управляющего воздействия на объект. ymax – предельное значение управляющего воздействия.
При создании системы рассчитываются параметры настройки регулятора (kp, s, p), при которых будут обеспечены переходные процессы с симметричными колебаниями и минимальным динамическим забросом регулируемого параметра (например, процесс с минимальной интегральной ошибкой).
В программном обеспечении контроллеров, специализированных на реализацию ПИД-законов регулирования, предусмотрены драйверы для проведения автонастройки коэффициентов (kp, s, p) регулятора непосредственно на объекте (см. глоссарий каталога фирмы ОВЕН) [3].
При создании системы САР для нового объекта, предварительный выбор параметров настройки регулятора рекомендуется выпол-
37
нять с использованием графо-аналитичесуих методик [2]. Авторы методик указывают на необходимость последующей корректировки настройки исследованием переходных характеристик в замкнутом контуре САР на объекте или на модели системы.
СТРУКТУРА И МАТЕМАТИЧЕСКОЕ ОБЕСПЕЧЕНИЕ МОДЕЛИ СИСТЕМЫ ФУНКЦИОНАЛЬНОГО РЕГУЛИРОВАНИЯ
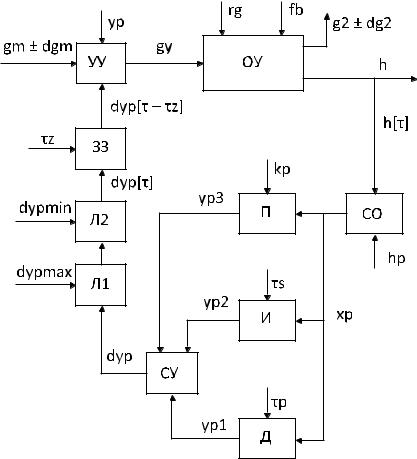
На рис. 9 структура САР преобразована в схему модели контура стабилизации уровня в баке-дозаторе.
Рис. 9. Структура модели контура стабилизации уровня в баке-дозаторе
38

Математическое описание звеньев модели
Звено ОУ (объект управления):
dh |
1 |
(gy – (g2 + dg2), |
|
|
|
|
|
d |
|
rg fb |
|
где h – уровень жидкости в баке, м; rg – плотность жидкости, кг/м3; fb – площадь сечения бака, м2; gy – расход жидкости через регулирующий клапан на входе в бак, кг/с; g2 – суммарный расход жидкости на выходе из бака, кг/с; dg2 – положительное или отрицательное отклонения от номинала расхода из бака (возмущение), кг/с;
Приращение уровня в баке за промежуток времени dτ (шаг интегрирования)
dh[dτ] = (1 / (rg·fb))·(gy – (g2 + dg2)·dτ
Изменение численного значения уровня в динамике
h[τ + dτ] = h[τ] + dh[dτ]
Звено СО – модуль вычисления сигнала ошибки:
xp*τ+ = h*τ+ – hp,
где xp[τ] – численное значение сигнала ошибки в момент времени τ, м; hp– уставка регулятору (настройка), м; h[τ] – численное значение уровня в баке в момент времени τ, м.
Звено П – модуль формирования пропорциональной составляющей при ПИД-регулировании:
yp3 = kp·xp[τ],
где yp3 – численное значение пропорциональной составляющей в суммарном управляющем воздействии, % ХРО; kp – численное значение коэффициента усиления ПИД-регулятора, % ХРО/м (может быть использовано также значение пределопропорциональности xp = 1/kp).
Звено И – модуль формирования интегральной составляющей ПИД-регулятора:
yp2=kp τ2 xp dτ
τs τ1
или
dyp2[dτ] = (kp·xp[τ]/τs)·dτ
39
yp2 = yp2[τ+dτ]=yp2[τ]+dyp2[dτ],
где dyp2[dτ] – приращение численного значения интегральной составляющей управляющего воздействия за интервал интегрирования dτ, % ХРО; τs – численное значение настройки постоянной времени звена интегрирования регулятора, с; yp2[τ+dτ], yp2[τ] – численное значение интегральной составляющей в суммарном управляющем воздействии в указанный момент времени, % ХРО.
Звено Д – модуль формирования дифференциальной составляющей при ПИД-регулировании:
yp1[τ]=kp·τp·xp[τ]/dτ,
где yp1[τ] – численное значение дифференциальной составляющей в суммарном управляющем воздействии в указанный момент времени, % ХРО; τp – численное значение настройки постоянной времени звена дифференцирования регулятора, с.
Звено СУ – модуль формирования суммарного управляющего воздействия при ПИД-регулировании:
dyp*τ+ = yp1*τ+ + yp2 + yp3,
где dyp[τ] – суммарное управляющее воздействие ПИД регулятора в момент времени τ, % ХРО.
Звено Л1 – логический модуль ограничения (ypmin = 90 % ХРО) хода регулирующего клапана в сторону закрытия и звено Л2 – логический модуль ограничения (ypmax = 10 %ХРО) хода регулирующего клапана в сторону открытия при ПИД-регулировании
IF (yp1*τ++yp2+yp3) ≥ 40 THEN dyp*τ+ = 40
ELSFIF (yp1*τ++yp2+yp3) ≤ –40 THEN dyp*τ+ = –40
ELSE dyp*τ+ = (yp1*τ++yp2+yp3)
END IF
Звено ЗЗ – задержка на τz с реализации управляющего воздействия на УУ:
yp[τ] = yp + (yp+dyp[τ – τz]),
где yp – численное значение величины закрытия клапана при начальном равновесном режиме, например, yp = 50 % ХРО; dyp[τ – τz], %
40