Материал: Д6590 Данин ВБ Автоматизированные комплексы
ХРО – суммарное управляющее воздействие ПИД регулятора в момент времени [τ – τz], где τz – время запаздывания.
Звено УУ – клапан, управляющий подачей жидкости в бак:
gy[τ] =(gm+dgm)·(1–0,01(yp+dyp[τ – τz]),
где gy[τ] – численное значение количества жидкости, поступающей в бак в момент времени τ, кг/с; gm – численное значение количества жидкости, поступающей из магистрали подачи при полностью открытом регулирующем клапане (yp = 0, % ХРО), кг/с; dgm – положительное или отрицательное отклонение от номинала количества жидкости, поступающей из магистрали (возмущение), кг/с.
Приведѐнная выше система уравнений модели САР оформляется в виде программного модуля для проведения циклических расчѐтов изменения численных значений регулируемого параметра как реакции на возмущение. Программный модуль может быть оформлен в среде QBasic [4], либо в виде «считающих таблиц» в среде Excel [5].
ВЫБОР НАСТРОЙКИ ФУНКЦИОНАЛЬНОГО РЕГУЛЯТОРА С ИСПОЛЬЗОВАНИЕМ МОДЕЛИ САР
Рассмотрим алгоритм выбора параметров настройки ПИДрегулятора на примере модели для исследования САР бака-дозатора.
Вприл. 1 приведена программа-шаблон REGAST2. bas, работающая в среде QBasic. Программа подготовлена для исследования системы уравнений звеньев структурной схемы, приведена на рис. 9.
Вприл. 1 по тексту программы имеются пояснения о последовательности работы с программой.
Подготовленный шаблон можно использовать для формирования разгонных характеристик астатического объекта (регулятор при этом отключѐн), а также для исследования переходных процессов САР при различных изменениях производственных ситуаций, которые имитируются скачкообразными изменениями возмущающих воздействий на объект.
Втекст программы REGAST2 внесены характеристики и параметры, соответствующие первоначальному статическому состоянию бака-дозатора, полученные при анализе объекта и занесѐнные в табл. 3.
41
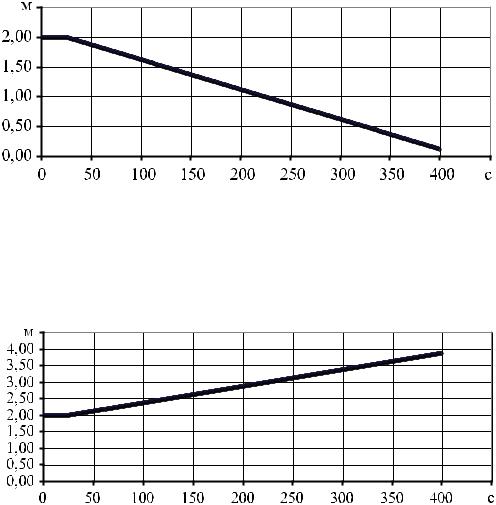
На рис. 10 результаты исследования реакции бака-,дозатора на максимальные отклонения от номинала возмущения по каналу потребления жидкости из бака dg2 (рис. 10, А) и по каналу управления подачей жидкости в бак dyp (рис. 10, Б).
А. Номинальное равновесное состояние (до момента времени 25 с) |
h = 2 м, g2 = 10 кг/с, gy = 10 кг/с (yp = 50 %, gm = 20 кг/с). |
Возмущение dg2 = 2 кг/с внесено в момент времени 25 с. |
Из обработки графика: kx = h/Δτ/dg2 = (2 – 0,5)/(325 – 25)/2 = 2,5·10–3, м/кг |
Б. Номинальное равновесное состояние (до момента времени 25 с) h = 2 м, g2 = 10 кг/с, gm = 20 кг/с, yp = 50 % (gy = 10 кг/с).
Возмущение по каналу управления yp = 40 % (dyp = –10 %, dgy = 2 кг/с) внесено в момент времени 25 с.
Из обработки графика:
ky = h / Δτ/dyp = (3,5 – 2,0)/(325 – 25)/10 = 5·10–4, м/% ХРО/с
Рис. 10. Разгонные характеристики бака-дозатора
42
В комментариях к рис. 10 дан пример обработки разгонных характеристик астатического объекта с целью перехода к математическому описанию его динамических свойств (определение =kx и =ky).
Программа REGAST2 обеспечивает также проверку на модели результатов выбора параметров настройки ПИД-регулятора для заданного диапазона изменения производственных ситуаций. Вычисления по программе по методу численного интегрирования, обеспечивают формирование переходных характеристик САР при различных возмущениях и настройках регулятора.
Предварительный выбор параметров настройки ПИД-регулято- ра для бака-дозатора был выполнен с использованием графоаналитической методики (см. прил. 1). Оценка оптимальности выбора параметров настройки регулятора производилась по виду переходных характеристик в контуре САР, полученных на модели.
На рис. 11, 12, 13 приведены примеры анализа на модели САР бака-дозатора, качественных характеристик переходных процессов в системе при максимальных отклонениях возмущающих воздействий на объект. В комментариях к рисункам дана обработка полученных переходных характеристик для оценки оптимальности выбора параметров настройки регулятора.
Из анализа результатов следует, что целесообразно выбрать вариант настройки на переходный процесс с заданной интенсивностью затухания колебаний (рис. 12). Такая настройка САР обеспечивает при максимальном возмущении по основному каналу отбора жидкости из бака dg2 формирование переходного процесса (рис. 12, А) в виде симметричных (относительно уставки hp = 2 м) затухающих колебаний. Симметричность колебаний уровня обеспечивает осреднение в динамике количества жидкости, поступающей к потребителю из бакадозатора. При этом динамический заброс (амплитуда первой волны)
dh = A1 = 0,15 м продолжительностью d d =80 с допустим по условиям эксплуатации объекта (см. табл. 3). Необходимо также учитывать, что при такой настройке регулятора, не следует скачкообразно изменять уставку регулятору dhp, так как при переходе в новое равновесное состояние (рис. 12, Б) динамический заброс dh = A1 = 0,4 м существенно превышает допустимый dh = 0, 2 м (табл. 3).
Представленный на рис. 11 вариант настройки регулятора реализует апериодический переходный процесс. При этом отклонение ре-
43
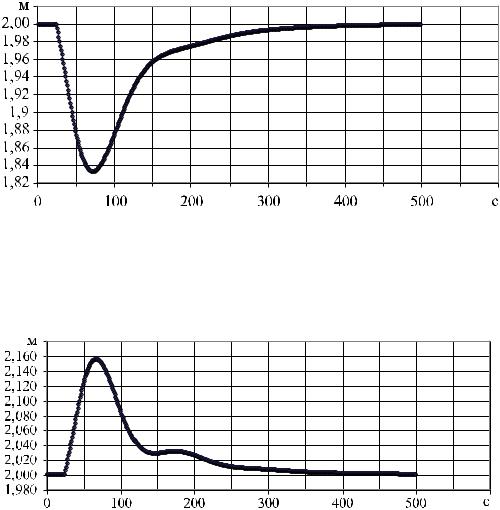
гулируемого параметра (в динамике) – одностороннее, динамический заброс больше по амплитуде и по продолжительности.
А. Номинальное значение g2 =10 кг/с. Возмущение dg2 = 2 кг/с. Из обработки графика: Динамический заброс δdh = 2 – 1,83 = 0,17, м.
Продолжительность заброса dτd = 200, с. Время регулирования τp = 300 с
Б. Номинальное значение gm =20 кг/сек. Возмущение dgm = 4 кг/с.
Из обработки графика:
Динамический заброс δdh = 2,160 – 2,0 = 0,160 м. Продолжительность заброса dτd = 200 с.
Время регулирования τp = 250 с
Рис. 11. Переходная характеристика САР бака-дозатора: Параметры настройки ПИД-регулятора: kp = 60 % ХРО / м, tp = 0,1 с, ts =100 с.
(Переходный процесс – апериодический)
44
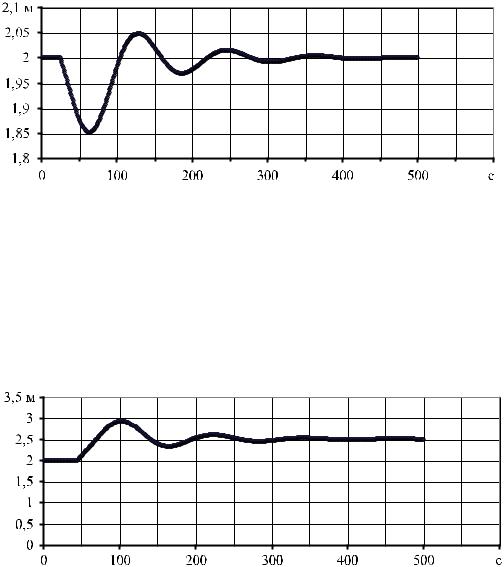
А. Номинальное значение g2 =10 кг/с. Возмущение dg2 = 2 кг/с.
Из обработки графика:
Динамический заброс δdh =A1 = 2 – 1,85 = 0,15 м. Продолжительность заброса dτd = 115 – 35 = 80 с.
Коэффициент затухания колебаний (отношение амплитуд третей и второй волн) φ = A3/A2·100 = (2–1,97)·100/(2,05–2) = 60 %.
Время регулирования τp = 400 – 35 = 365 с
Б. Номинальное значение hp = 2 м. Возмущение hp = 2,5 м
Из обработки графика: Динамический заброс δdh =A1 = 2,9 – 2,5 = 0,4 м. Продолжительность заброса dτd = 140 – 70 = 70 с.
Коэффициент затухания колебаний (отношение амплитуд третей и второй волн) φ = A3/A2·100 = (2,6 – 2,5)·100/(2,5 – 2,3) = 50 %.
Время регулирования τp = 300 – 45 = 255 с
Рис 12. Переходная характеристика САР бака дозатора. Параметры настройки ПИД– регулятора: kp = 80 % ХРО/м, tp = 0,1 с, ts = 50 с. (Переходный процесс с заданной интенсивностью затухания
колебаний)
45