Материал: Kursach
Рис. 4.3 Переходные характеристики в СПС третьего порядка
Полученные характеристики позволяют сравнить качественные показатели СПС и обычной линейной системы. Из переходных характеристик СПС следует, что переходный процесс имеет монотонный характер, при этом время переходного процесса меньше, чем в линейной системе. Изменяя параметры СПС, можно влиять на качественные показатели системы. Однако для таких изменений необходимо определить пределы изменения параметров, руководствуясь условиями устойчивости и условиями попадания изображающей точки на плоскость скольжения.
Определим запас устойчивости системы “в малом” по амплитуде и фазе, построив логарифмические частотные характеристики.
>> s=tf([1],[1 1.47 0.6]);
>> bode(s); margin(s)
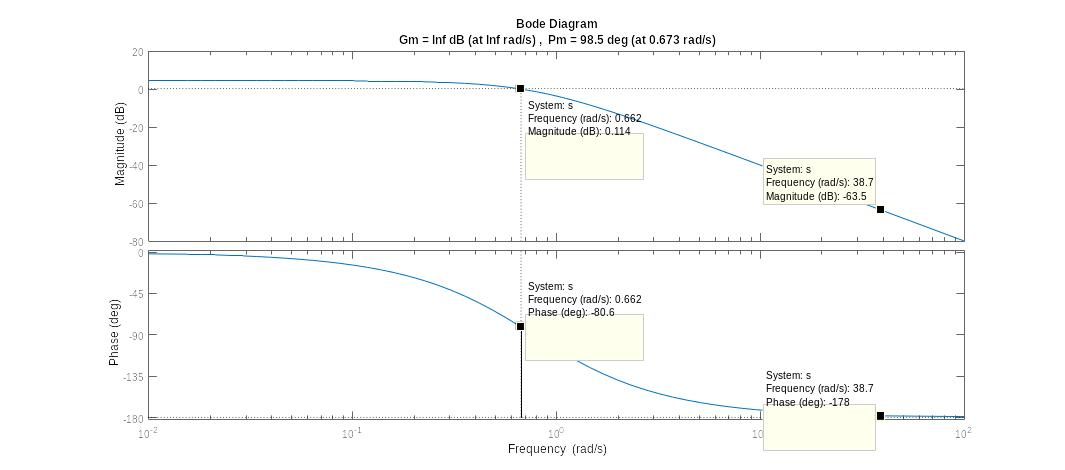
Рис. 4.4 Частотные характеристики системы в «малом»
Запас устойчивости по амплитуде составляет ≈ 63[дБ] > 20[дБ]
Запас устойчивости по фазе равен 98°>60°.
Таким образом, в результате синтеза СПС со скользящим режимом без учета нелинейного элемента мы получили систему, обладающую характеристиками, соответствующими техническому заданию, а именно: запас устойчивости “в малом” по амплитуде больше 20 [дБ], по фазе больше 60°.
4.3. Учет ограничений управляющего воздействия в спс
В реальных системах автоматического управления функциональные устройства, как правило, обладают нелинейными характеристиками. Можно утверждать, что практически все устройства автоматических систем являются нелинейными с кусочно-линейной характеристикой типа насыщение. Это обстоятельство объясняется тем, что во всех электрических, электронных, электромагнитных, и т.д. элементах выходной сигнал по мощности не может превышать мощности источника питания. Поэтому уровни напряжения и тока на выходе функциональных устройств не могут превышать аналогичных величин на выходе источника питания автоматической системы. Такие естественные ограничения могут существенно повлиять на качество системы, поэтому при синтезе системы необходимо учитывать наличие таких ограничений.
Рассмотрим, какое влияние на поведение системы окажет введение нелинейности.
Структурная схема СПС третьего порядка с нелинейным элементом представлена на рис. 4.5.
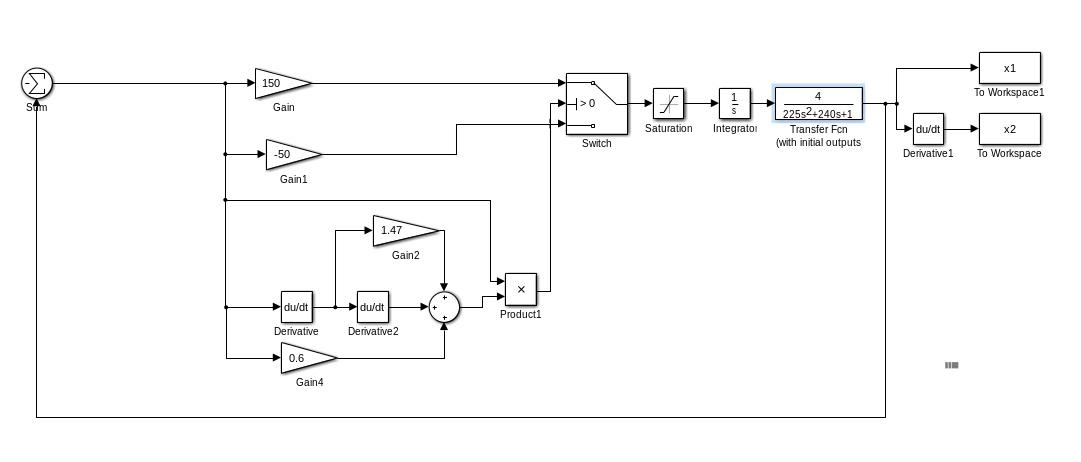
Рис.4.5 Структурная схема СПС третьего порядка с нелинейным элементом
Переходные характеристики СПС со скользящим режимом с учётом нелинейного элемента с разными начальными условиями представлены на рисунке 4.6.
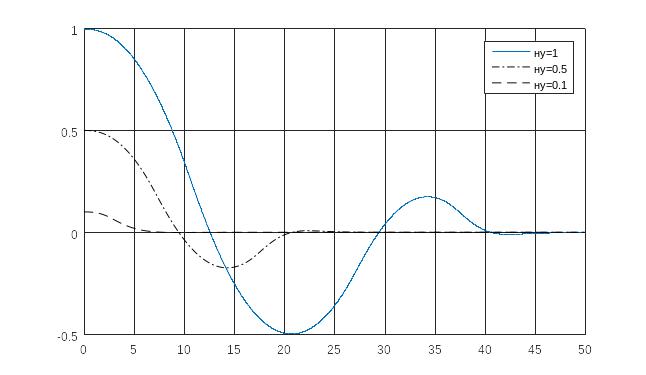
Рис. 4.6. ПХ СПС со скользящим режимом с учётом НЭ с разными НУ.
Переходные характеристики СПС со скользящим режимом с учётом нелинейного элемента и без него с начальными условиями 0.4 представлены на рисунке 4.7.
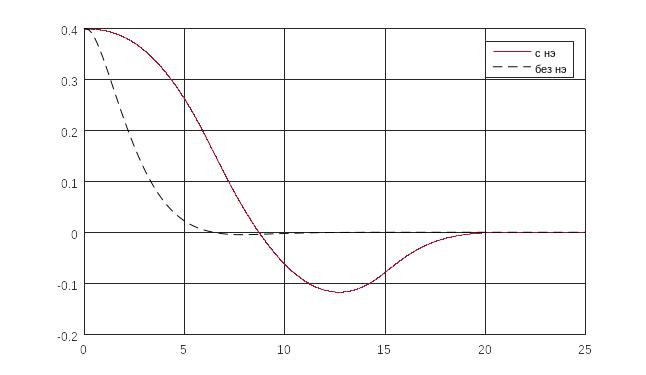
Рис. 4.7. ПХ СПС со скользящим режимом с учётом НЭ и без него.
Фазовые траектории СПС со скользящим режимом с учётом нелинейного элемента с разными начальными условиями представлены на рисунке 4.8.
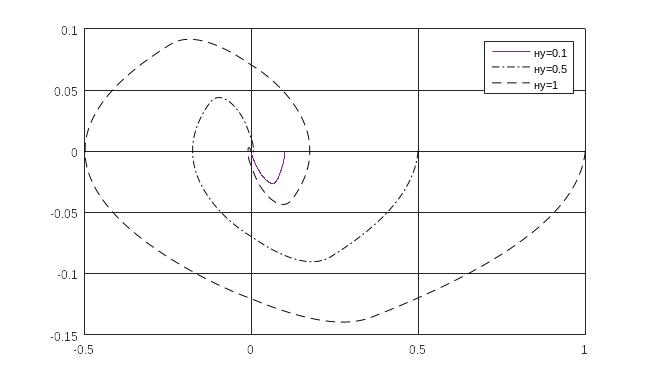
Рис. 4.8. Фазовые траектории СПС со скользящим режимом с учётом НЭ с разными НУ
Фазовые траектории СПС со скользящим режимом с учетом нелинейного элемента и без него с начальными условиями 0.4 представлены на рисунке 4.9.
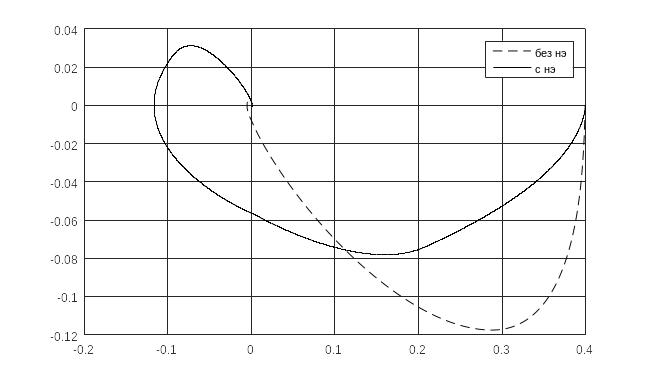
Рис. 4.9. Фазовые траектории СПС со скользящим режимом с НЭ и без него
Как видно из приведенных графиков, при введении нелинейного элемента показатели системы немного ухудшились. Таким образом, при больших рассогласованиях система с переменной структурой при ограничении управляющего воздействия ведет себя как релейная система, а потому будет неустойчивой, когда неустойчива соответствующая релейная система.
В этом случае целесообразно изменить линию переключения S = 0, отказавшись от прямой линии. Очевидным решением в данной ситуации является построение линии переключения в виде ломаной линии, состоящей из двух участков, S = S1 + S2. На участке, где |x1| < x0 построение линии переключения S1 ведется по рассмотренным выше правилам для СПС со скользящим режимом. На втором участке, где |x1| > x0, построение линии переключения S2 должно вестись по правилам релейной системы. При этих построениях следует учитывать релейную характеристику с зоной нечувствительности.
Вид фазовых траекторий релейной системы должен соответствовать устойчивой релейной системе, при этом движение в релейной системе может быть скользящим или колебательным, сходящимся к началу координат.
5. Синтез нелинейной спс при больших отклонениях от равновесного состояния
5.1. Анализ и синтез релейной системы
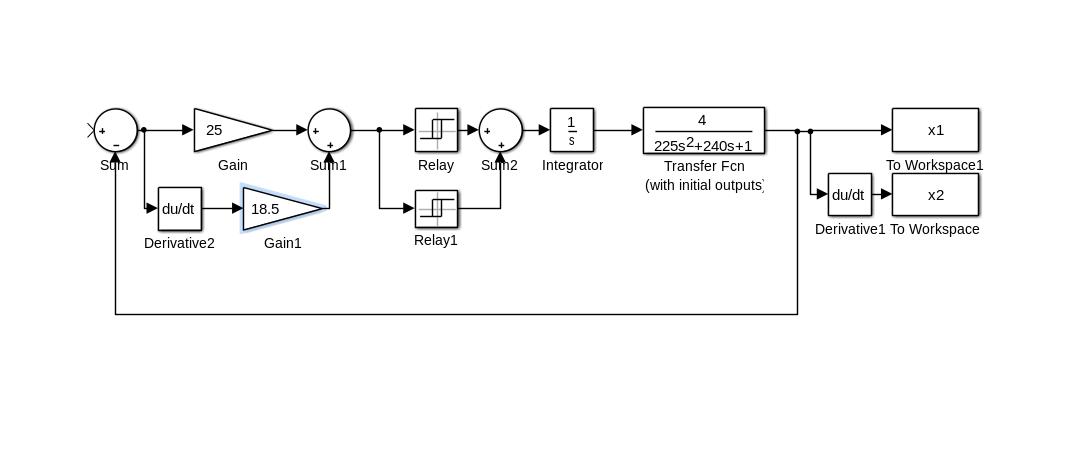
Рис. 5.1. Структурная схема релейной системы управления с обратной связью
Спроектированная система является устойчивой “в малом”, но неустойчивой “в большом”, поэтому синтезируем релейную систему соответствующую данной при отклонениях превышающих линейную зону нелинейного звена с насыщением. Звено с насыщением в этом случае будем рассматривать как реле с зоной нечувствительности – трехпозиционное реле.
Система состоит из линейной части с передаточной функцией W(p)=R(p)/Q(p), релейного элемента и пропорционально-дифференциального регулятора. Как будет показано ниже, структура и параметры регулятора существенным образом влияют свойства релейной системы, в том числе и на устойчивость, что необходимо при построении нелинейных систем с переменной структурой.
Чтобы получить трехпозиционное реле без гистерезиса, собираем схему из суммы двух релейных звеньев (двухпозиционное реле с гистерезисом) и настраиваем релейные элементы (Relay) следующим образом:
Relay1: Relay2:
Switch on point: 0.9; Switch on point: -0.9;
Switch off point: 0.9; Switch off point: -0.9;
Output when on: 0.9; Output when on: 0;
Output when off: 0. Output when off: -0.9.
Определим с помощью моделирования параметры пропорционально-дифференциального регулятора, которые обеспечат существование автоколебательного режима.
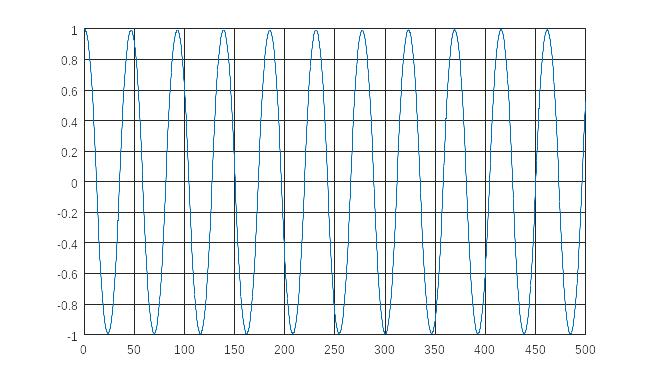
Рис. 5.2. Автоколебания в релейной системе управления.
Фазовая траектория в релейной системе управления:
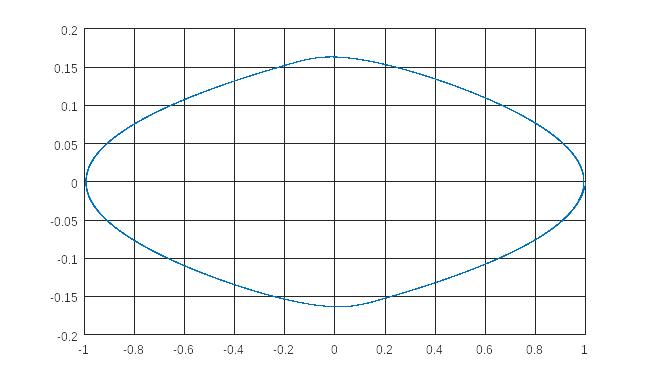 Рис. 5.3. Фазовая траектория
Рис. 5.3. Фазовая траектория
В результате синтеза для рассматриваемого случая уравнение линии переключения получится в виде: S2 = 25x1 + 18.5x2 + d.
5.2. Исследование свойств спроектированной нелинейной спс
На первом этапе нами была синтезирована СПС без учета нелинейности с линией скольжения S1, проходящей через начало координат. Затем для синтеза СПС с нелинейным элементом (НЭ) мы синтезировали релейную систему для больших отклонений с линией переключения S2 = 5x1 + 140x2 + d , где значение d определяется координатами точки пересечения линий S1 и S2. Значение d определяет характер процесса в СПС на завершающей стадии движения. Для получения требуемого вида процесса и улучшения показателей системы коэффициенты усиления были скорректированы. Структурная схема для моделирования представлена на рис. 5.5
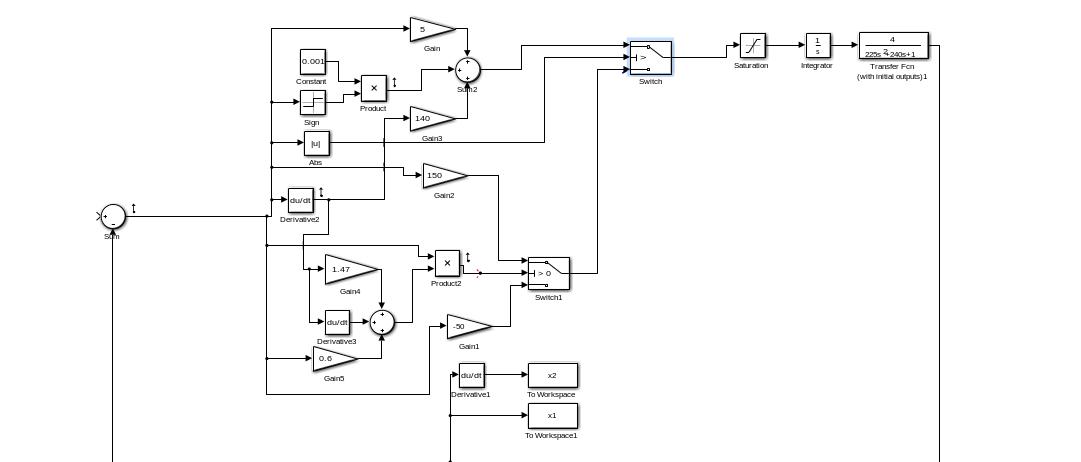
Рис. 5.5. Структурная схема нелинейной СПС
Параметры синтезированной нелинейной СПС отличаются от параметров, полученных при синтезе СПС без учета нелинейности и релейной системы для больших отклонений.
Переходные процессы в разработанной системы в “малом” при различных значениях d представлены на рисунке 5.6.
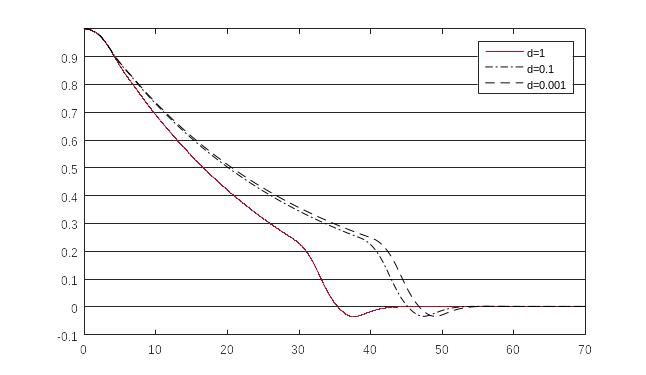
Рис. 5.6. Переходные характеристики нелинейной СПС в “малом” при различных значениях d.
Фазовые траектории спроектированной системы на малом отклонении представлены на рисунке 5.7.
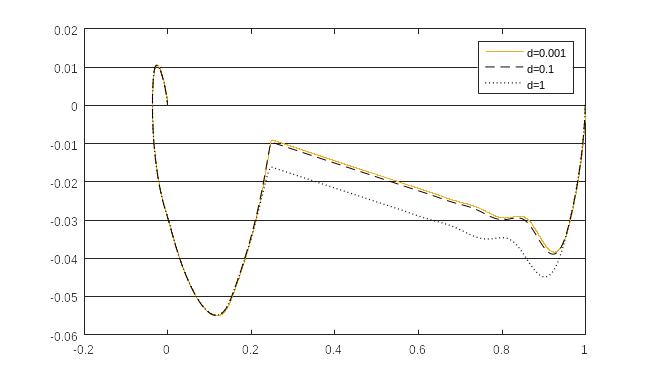
Рис. 5.7. Фазовые траектории нелинейной СПС в “малом” при различных значениях d.
Переходные процессы в спроектированной системе в “большом” при различных значениях d представлены на рисунке 5.8.
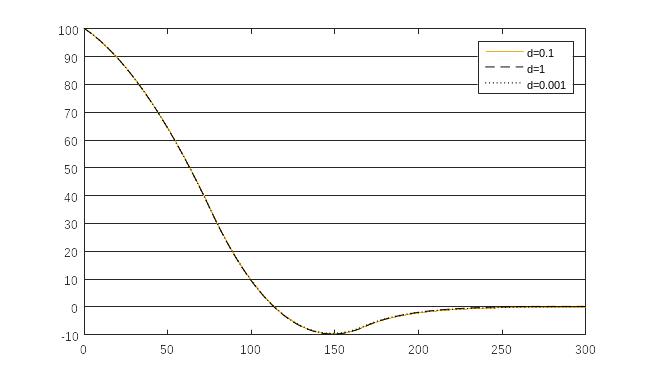
Рис. 5.8. Переходные характеристики нелинейной СПС в “большом” при различных значениях d.
Фазовые траектории спроектированной системы на большом отклонении представлены на рисунке 5.9.
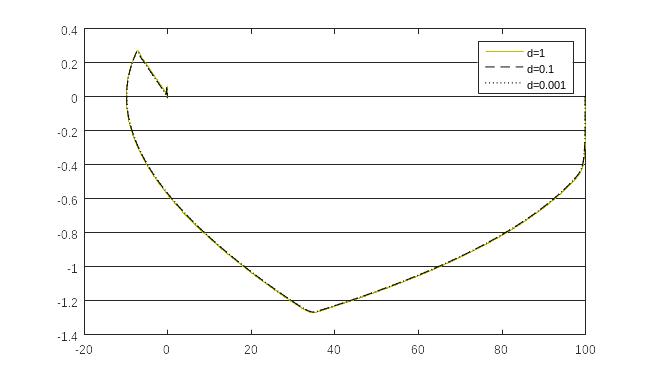
Рис. 5.9. Фазовые траектории нелинейной СПС в “большом” при различных значениях d.
Точность поддержания выходной координаты в установившемся режиме при d=1 составила ε = 0.4% – что удовлетворяет заданным требованиям точности ε ≤ 0.5%.