Материал: Kursach
1.2. Исследование свойств управляемого объекта
На этапе аналитического конструирования системы управления изучение свойств управляемого объекта выполняется по его математической модели. Модели процессов в объекте могут быть представлены в различных видах. Рассмотрим некоторые из них на примере одномерного объекта, процессы в котором описываются нелинейным дифференциальным уравнением третьего порядка.
1.2.1. Модель объекта в виде структурной схемы.
Математическая модель управляемого объекта, представленная в виде структурной схемы:
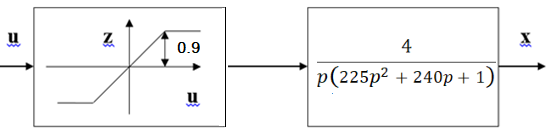
Первые представления о характере процессов в управляемом объекте можно сделать по структурной схеме. Объект является нелинейным, так как состоит из последовательно соединенных существенно нелинейного звена типа насыщение, интегрирующего звена и апериодического звена второго порядка, поэтому в состоянии статического равновесия объект находиться не может – при любом значении управляющего воздействия U, кроме нулевого. Выходная координата X будет возрастать по абсолютному значению. В объекте возможен установившийся режим - движение с постоянной скоростью изменения выходной координаты, который наступит после окончания переходного процесса в апериодическом звене второго порядка при условии, что управляющее воздействие постоянно. Максимальная скорость изменения выходной координаты зависит от значения управляющего воздействия и параметров нелинейного звена с характеристикой типа насыщение. Очевидно, что после звена с насыщением значение сигнала не может превышать ±0.9, поэтому численное значение установившейся скорости не превышает 3.6 с учетом коэффициента передачи объекта по управляющему воздействию, равному 4. Характер нарастания выходной координаты вначале движения при подаче на вход ступенчатого управляющего воздействия должен быть монотонным, так как он определяется апериодическим звеном первого порядка, корни характеристического уравнения которого равны:
λ 1= -0.0042
λ 2= -1.062
1.2.2. Модель управляемого объекта в виде уравнения.
Для составления дифференциального уравнения объекта воспользуемся его операторной записью, которую получим из структурной схемы:
x= ,
если |u| < 0.9
,
если |u| < 0.9
x= ,
если |u| > 0.9
,
если |u| > 0.9
Дифференциальные уравнения для этих двух случаев последовательно можно получить следующим образом
[ ]x=4u,
если |u| <0.9,
]x=4u,
если |u| <0.9,
[p x=3.6sign
(u), если |u| > 0.9,
x=3.6sign
(u), если |u| > 0.9,
C учетом
оператора дифференцирования :
:

1.2.3. Модель управляемого объекта в пространстве состояний
Переход к модели в
пространстве состояний осуществляется
по известному алгоритму. Переменными
состояния
 принимаются
выходная координата и её производные.
Последовательно выполняя замены, приняв
принимаются
выходная координата и её производные.
Последовательно выполняя замены, приняв
 ,
запишем систему уравнений в пространстве
состояний:
,
запишем систему уравнений в пространстве
состояний:


 ,
если | u | < 0.9,
,
если | u | < 0.9,


 ,
если | u | > 0.9.
,
если | u | > 0.9.
Дальнейшие исследования свойств управляемого объекта можно выполнить, используя модели при подаче на вход типовых воздействий.
1.2.4. Переходные характеристики объекта
Для получения
переходной характеристики управляемого
объекта по выходной координате подадим
на вход ступенчатый сигнал
 ,
а к выходу подключим осциллограф. Для
построения переходной характеристики
воспользуемся графическим редактором
Simulink из приложения MatLab.
,
а к выходу подключим осциллограф. Для
построения переходной характеристики
воспользуемся графическим редактором
Simulink из приложения MatLab.
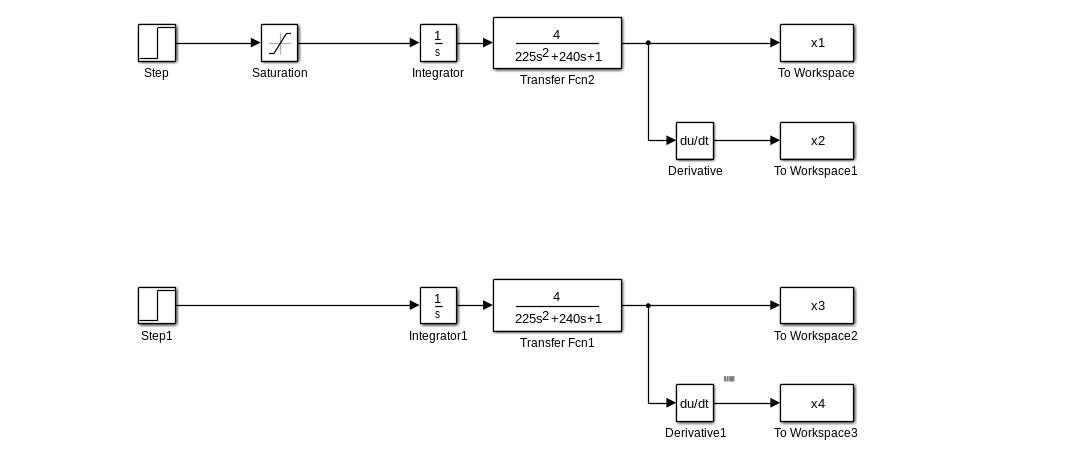
Рис.1.1. Структурные схемы систем с нелинейностью и без нее
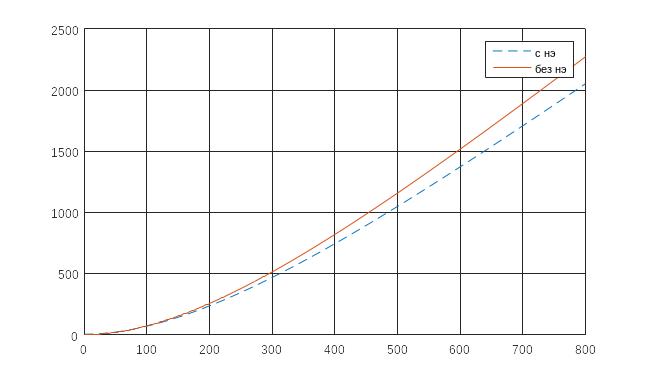
Рис. 1.2. Переходная характеристика по выходной координате
Переходные характеристики управляемого объекта с нелинейным элементом и без нелинейного элемента (Рис. 1.2.)
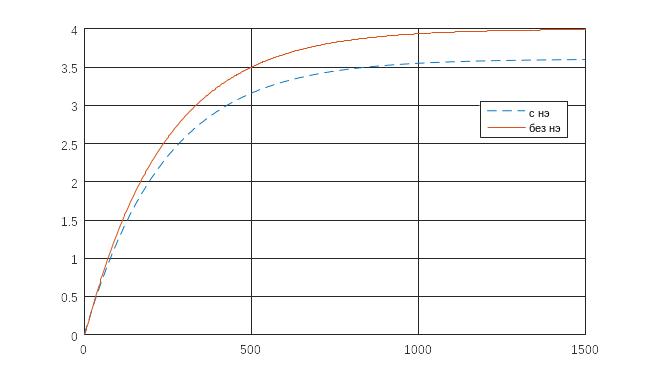
Рис. 1.3. Скоростная характеристика по скорости
Скоростная характеристика управляемого объекта с нелинейным элементом и без нелинейного элемента (Рис. 1.3.)
Предположения при анализе структурной схемы управляемого объекта подтвердились, т.е. при подаче на вход ступенчатого воздействия выходная координата неограниченно растет, а изменение ее скорости носит монотонный характер.
Установившееся значение скорости достигается за 1500с
Для системы с нелинейностью – 3.6 ед./с
Для системы без нелинейности - 4 ед./с
1.2.5. Частотные характеристики объекта
Построим частотные характеристики объекта. Для построения ЛАЧХ воспользуемся функциями MatLab:
>> PF= tf([4], [225 240 1 0]);
>> bode(PF)
>> margin(PF)
>> grid on;
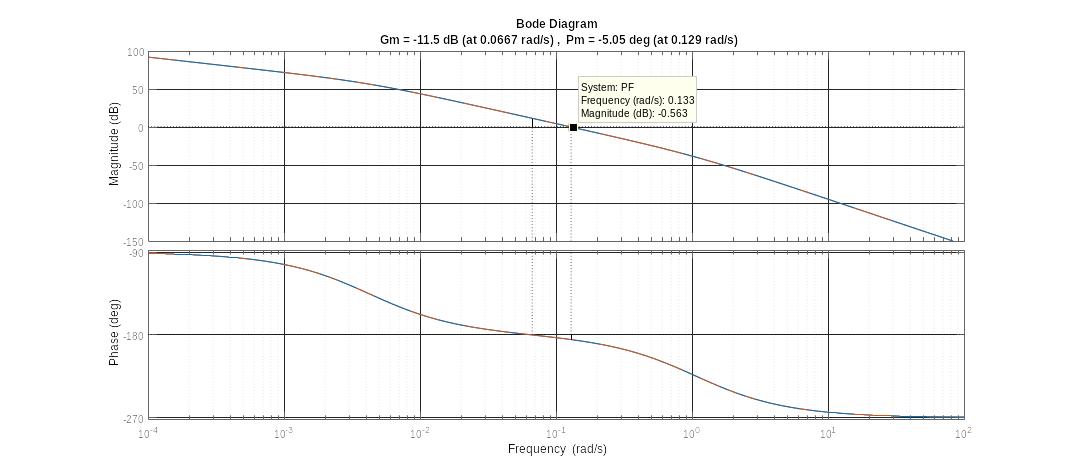
Рис. 1.4. График частотных характеристик (ЛАХ и ЛФХ) управляемого объекта.
По полученным графикам определяется частота среза объекта, значение которой влияет на выбор периода квантования в цифровой системе. В нашем случае частота среза равна ωcр = 0.133[рад/сек].
2. Обоснование выбора структуры системы управления
2.1. Постановка задачи
Автоматическая система управления представляет собой совокупность управляемого объекта и автоматического управляющего устройства.
Рис. 2.1. Обобщённая структура САУ
Известны три принципа управления – разомкнутого, замкнутого и компенсации возмущений. Наиболее разумно выбрать замкнутый принцип управления, так как задана высокая точность и не определен характер внешних воздействий. В этом случае управляющее воздействие будем формировать в виде функции:

где f
– неубывающая функция отклонения х,
его производных и интеграла, причем
х = Хзад – Х. значение
Хзад определяется заданным
алгоритмом функционирования системы
и представляет собой известную функцию
времени, в частности, для систем
стабилизации Хзад = const.
В качестве первого приближения можно
выбрать пропорциональный регулятор, в
котором управляющее воздействие
формируется в виде
 ,
где
,
где
 -
коэффициент передачи регулятора, который
можно изменять для достижения наилучшего
качества управления в рамках выбранной
структуры.
-
коэффициент передачи регулятора, который
можно изменять для достижения наилучшего
качества управления в рамках выбранной
структуры.
2.2. Исследование системы управления с пропорциональным регулятором
Составим структурную схему системы управления для заданного управляемого объекта при пропорциональном регулировании. Оценим собственные свойства системы регулирования при выбранной структуре управляющего устройства. Для этого исследуем свободное движение в замкнутой системе, считая, что это движение вызвано некоторым начальным отклонением и не зависит от входного воздействия, как задающего, так и возмущения.
Запишем математическую модель замкнутой системы относительно отклонения x в операторной форме:

или в виде дифференциального уравнения:


Так как при исследовании
собственных свойств системы
 ,
а при замыкании системы как следует из
структурной схемы
,
а при замыкании системы как следует из
структурной схемы
 ,
поэтому уравнения движения примут вид:
,
поэтому уравнения движения примут вид:


Анализ уравнений движения показывает, что:
При
 линейная обратная связь в системе
отсутствует, и что в этом случае движение
в системе определяется свойствами
управляемого объекта, исследованными
ранее при условии, что на его вход
подается постоянное по значению
управляющее воздействие. Знак этого
воздействия такой, чтобы отклонение
всегда уменьшалось, что определяется
знаком обратной связи. Очевидно, что в
рассматриваемом случае мы имеем дело
с релейной системой управления.
линейная обратная связь в системе
отсутствует, и что в этом случае движение
в системе определяется свойствами
управляемого объекта, исследованными
ранее при условии, что на его вход
подается постоянное по значению
управляющее воздействие. Знак этого
воздействия такой, чтобы отклонение
всегда уменьшалось, что определяется
знаком обратной связи. Очевидно, что в
рассматриваемом случае мы имеем дело
с релейной системой управления.
При
 движение в системе описывается линейным
дифференциальным уравнением третьего
порядка с постоянными коэффициентами.
В установившемся режиме после окончания
переходного процесса значение ошибки
равно 0, что подтверждается структурой
системы - система является астатической
с одним интегрирующим звеном. В таких
системах, как известно, ошибка по
положению равна 0, а ошибка по скорости
обратно пропорциональна коэффициенту
передачи системы по скорости, т.е.
добротности.
движение в системе описывается линейным
дифференциальным уравнением третьего
порядка с постоянными коэффициентами.
В установившемся режиме после окончания
переходного процесса значение ошибки
равно 0, что подтверждается структурой
системы - система является астатической
с одним интегрирующим звеном. В таких
системах, как известно, ошибка по
положению равна 0, а ошибка по скорости
обратно пропорциональна коэффициенту
передачи системы по скорости, т.е.
добротности.
Определим предельное значение k по критерию Гурвица, при котором линейная система будет находиться на границе устойчивости.
Динамические характеристики системы
Исследуем
динамические характеристики системы,
прежде всего устойчивость, и возможности
их изменения за счет изменения параметров
регулятора, которые в данном случае
ограничены изменением значений
коэффициента передачи регулятора k.
Неустойчивость движений в рассматриваемой
системе может быть вызвана двумя
причинами – неустойчивостью движения
в финальной стадии из-за неустойчивости
линейной системы и неустойчивостью,
вызванной релейным режимом работы
системы при
 .
.
По критерию Гурвица определим диапазон значений параметра k, при которых система асимптотически устойчива):

(ПФ, составленная для встречно-параллельного соединения)
Составим ХП:


Матрица Гурвица:
 ;
;




2.3. Исследование системы управления с пропорционально-дифференциальным регулятором
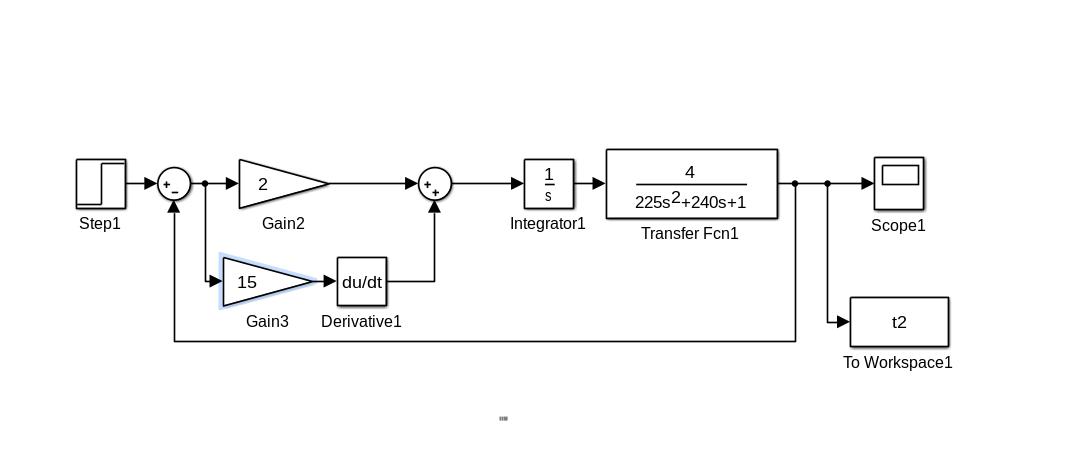
Рис. 2.3. Структурная схема системы с пд-регулятором
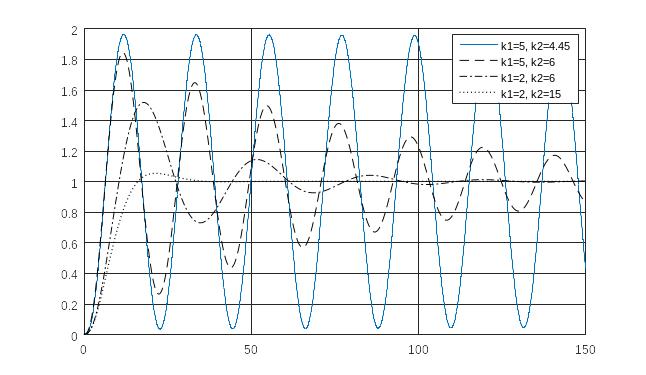
Задачу повышения быстродействия при сохранении устойчивости можно решить за счёт изменения структуры регулятора – перейдем к пропорционально-дифференциальному регулятору, в котором управляющее воздействие формируется по закону
 .
.
Идея повышения быстродействия системы
заключается в увеличении k1
при одновременном увеличении k2.
Причем увеличение
 должно привести к увеличению скорости
нарастания переходной характеристики,
а увеличение
должно привести к увеличению скорости
нарастания переходной характеристики,
а увеличение
 - к уменьшению колебательности и
увеличению запасов устойчивости.
- к уменьшению колебательности и
увеличению запасов устойчивости.
При указанном законе управления уравнения свободного движения относительно ошибки запишутся следующим образом:

- в виде дифференциального уравнения:
 ,
,


Передаточная функция замкнутой системы имеет вид:


Матрица Гурвица:
,



Тогда:

Переходные характеристики
Построим переходные характеристики для различных согласованных значений коэффициентов k1 и k2: