Материал: 6251
|
|
1 ∞ |
|
K2 N |
|
|
K2N |
||
y2 = |
|
|
|||||||
|
−∞∫ |
|
|
|
dω = |
|
. |
||
2π |
|
1+ jωT |
|
2T |
|||||
|
|
||||||||
Учитывая выражение (3.2.8), можно ввести понятие эквивалентной полосы пропускания для белого шума, имея в виду под последней полосу пропускания идеального фильтра низких частот Wэкв с единичным коэффициентом передачи (рис. 3.3), дающим на выходе такую же мощность сигнала, что и реальное звено с частотной передаточной функцией
W(jω).
|Wэкв| |
|W(jω)| |
|
|
|
1 |
−ωп |
ωп ω |
|
ω |
Рис. 3.3. Эквивалентная полоса пропускания
Если на вход идеального фильтра поступит белый шум интенсивностью N ( Sx (ω)= N ), то мощность выходного сигнала будет, очевидно
|
|
ωп |
N = N |
ω |
|
|
|
y2 = |
= N f ,(Гц) . |
(3.2.9) |
|||||
|
2π |
||||||
|
|
π |
|
|
|||
Мощность сигнала на выходе реального звена в соответствии с формулой (3.2.8) равна
|
|
1 |
∞∫ |
|
W (jω) |
|
2 Sx (ω)dω = |
N |
∞∫ |
|
W(jω) |
|
2 dω . |
|
y2 = |
||||||||||||||
|
|
|
|
|||||||||||
|
|
|||||||||||||
|
|
2π −∞ |
|
|
|
|
π 0 |
|
|
|
|
|||
171
Сравнивая последнее соотношение с формулой (3.2.9), получаем выражение для эквивалентной полосы пропускания
|
ω |
|
ω |
1 |
∞ |
|
W(jω) |
2 |
|
|
f ,(Гц) = |
|
= |
п = |
|
∫ |
|
|
dω . |
(3.2.10) |
|
2π |
|
|
||||||||
|
|
π |
π 0 |
|
|
|
|
|
||
|
|
|
|
|
|
|||||
3 . 2 . 2 . Определение статистически о птим альных парам етро в
Переходим к задаче синтеза. По сути, любая задача синтеза – это задача поиска оптимальной в определённом смысле системы. Поскольку в данном разделе речь идет о статистической динамике систем, критерии оптимальности также рассматриваются статистические. Наиболее распространенный критерий – это средний квадрат ошибки. Распространенность этого критерия связана, во-первых, с простотой соответствующих вычислений, а, во-вторых, с очевидным требованием повышения точности САУ. Вообще, кроме этого критерия в различных системах могут быть использованы и другие статистические критерии: отношение сигнал/шум, вероятность обнаружения цели, если речь идет об обнаружении сигнала цели, например, в радиолокационных системах ПВО, вероятность ложной тревоги в вышеупомянутых радиолокационных системах и др.
Начнем с простейшего случая параметрического синтеза, когда известна передаточная функция САУ, но не заданы или могут меняться параметры этой передаточной функции.
Пусть на входе простейшей одноконтурной системы с единичной обратной связью имеется задающее воздействие g(t) и аддитивная приведённая к входу помеха n(t) (верхняя ветвь схемы на рис. 3.4, а). Считаем
полезный сигнал и помеху случайными стационарными эргодическими 172
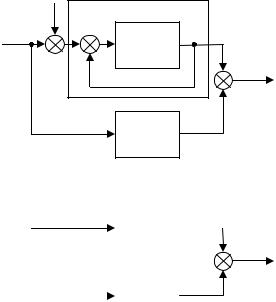
независимыми процессами с заданными спектральными плотностями. Идеальный сигнал yэт(t) получается после преобразования задающего полезного сигнала воображаемой идеальной системой с передаточной функцией Wэт (нижняя ветвь схемы на рис. 3.4, а). Разница между идеальной (требуемой) выходной величиной и реально получаемой величиной представляет собой ошибку.
|
n(t) |
|
|
|
Φ |
|
|
g(t) |
|
W |
y(t) |
|
|
− |
|
|
− |
|
|
|
|
ε(t) |
|
|
|
|
|
|
|
Wэт |
yэт(t) |
|
|
|
|
|
|
а |
|
n(t) |
Φ |
εn (t) |
− |
|||
Sn(ω) |
Sε |
|
(ω) |
|||
|
|
|||||
|
|
|
|
n |
|
ε(t) |
|
|
|
|
|
|
|
g(t) |
|
εg (t) |
|
|||
Wэт−Φ |
|
|||||
Sg(ω) |
Sε |
g |
(ω) |
|
||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
Рис. 3.4. Формирование сигнала ошибки
Запишем выражение для ошибки в операторной форме
173

Ε(s)= Y |
(s)− Y(s)= G(s)W |
(s)− (G(s)+ N(s)) |
W(s) |
|
= |
|
|||||
эт |
эт |
1+W(s) |
(3.2.11) |
||
|
|
||||
= G(s)(Wэт (s)− Φ(s))− N(s)Φ(s)= Εg (s)− Εn (s).
Структурная схема, построенная по выражению (3.2.11), приведена на рис. 3.4, б. Первое слагаемое в правой части формулы (3.2.11) это ошибка, обусловленная задающим воздействием, а второе – ошибка, связанная с помехой.
Вид эталонной передаточной функции зависит от решаемой задачи:
−для системы автоматического регулирования важна точная отработка задающего воздействия, поэтому Wэт (s)= 1 ,
−для системы связи допустима некоторая временная задержка и
Wэт (s)= Ke−τs ,
−для вычислительного устройства идеальная передаточная функция имеет вид в соответствии с выполняемой математической операцией,
например, для интегратора Wэт (s)= Kи s , для дифференциатора |
|
Wэт (s)= Kдs и т.п., |
|
− для экстраполятора W |
(s)= eτs , и т.д. |
эт |
|
В дальнейшем будем полагать, что рассматривается система автоматического регулирования, то есть Wэт (s)= 1 .
Ввиду независимости процессов g(t) и n(t) корреляционная функция ошибки Kε (τ) равна сумме корреляционных функций процессов
εg (t) и εn (t)
Kε (τ)= Kε g (τ)+ Kεn (τ),
174
и, следовательно, спектральная плотность Sε (ω) равна сумме соответствующих спектральных плотностей
Sε (ω)= Sε |
|
(ω)+ Sε |
(ω)= |
|
1− Φ(jω) |
|
2 Sg (ω)+ |
|
Φ(jω) |
|
2 Sn (ω). (3.2.12) |
|
|
|
|
|
|||||||
|
g |
|
n |
|
|
|
|
|
|
|
|
В выражении |
(3.2.12) применена формула (3.2.6) и учтено, что |
||||||||||
Wэт (s)= 1 .
Средний квадрат ошибки найдём из формулы (3.2.12) по выражению (3.2.8)
|
|
1 |
∞ |
|
1 |
∞ |
|
|||||||||
ε2 (t)= |
∫ |
|
1− Φ(jω) |
|
2 Sg |
(ω)dω + |
∫ |
|
Φ(jω) |
|
2 Sn |
(ω)dω . (3.2.13) |
||||
|
|
|
|
|||||||||||||
|
|
|||||||||||||||
|
|
π 0 |
|
|
|
|
|
π 0 |
|
|
|
|
|
|||
Минимизируя средний квадрат ошибки по изменяемому параметру ak, например, используя необходимое условие минимума
∂ε2 (t) = 0 , ∂ak
можно определить оптимальные значения варьируемых параметров системы.
|
|
Пример 3.2.3. Замкнутая система представляет собой апериодическое |
|||
звено первого |
порядка, то |
есть |
её передаточная функция равна |
||
Φ(s)= K 1+Ts . |
Полезный |
сигнал |
задан спектральной плотностью |
||
S |
g |
(ω)= 1 1+ ω2 , а помеха представляет собой белый шум интенсивностью |
|||
|
|
|
|
|
|
N. Требуется найти оптимальное значение коэффициента передачи K. |
|||||
|
|
Частотная передаточная функция замкнутой системы по ошибке равна |
|||
|
|
|
|
|
175 |