Материал: 6251
9.Для коррекции нелинейных систем применяются линейные и нелинейные корректирующие звенья, которые могут включаться последовательно, параллельно или в обратную связь.
10.Линейная коррекция нелинейных САУ подчинена тем же принципам, что и линейных САУ.
11.Применение нелинейных корректирующих звеньев предоставляет принципиально новые возможности при коррекции как нелинейных, так и линейных систем.
141
3. СТАТИСТИЧЕСКАЯ ДИНАМИКА САУ
В этом разделе рассмотрим поведение САУ при случайных изменениях внешних воздействий на неё. Речь идет, прежде всего, о различных заранее не предсказуемых помехах, мешающих работе САУ.
По происхождению все помехи можно разделить на естественные и искусственные. Первые возникают независимо от человека, вторые являются прямым или косвенным результатом деятельности человека.
Естественные помехи, в свою очередь, делятся на внешние и внутренние. К внешним помехам относятся случайные воздействия на объект управления внешней среды, помехи в каналах связи между регулятором и объектом и между задающим воздействием и регулятором. К внутренним помехам можно отнести шумы в радиотехнических устройствах, обусловленные тепловым шумом резисторов, шумами полупроводниковых приборов, дробовым эффектом в электронных лампах.
Искусственные помехи бывают неорганизованными и организованными. Неорганизованные помехи – это, прежде всего, промышленные помехи, источником которых являются объекты, создающие электромагнитные излучения: сварочные аппараты, рентгеновские аппараты, искрящие контакты электрических машин и др. Пример организованных помех – это радиопротиводействие системам противоракетной обороны.
По характеру поведения помех во времени можно все помехи поделить условно на узкополосные, импульсные и гладкие (или флуктуационные). К узкополосным помехам относятся помехи от передач радиостанций, наводки от электросети, фон двойной промышленной частоты от двухполупериодных выпрямителей в источниках питания и т.д. Им-
142
пульсные помехи имеют широкий частотный спектр и представляют собой хаотическую последовательность импульсов, причем переходной процесс в системе от каждого импульса успевает затухнуть до прихода следующего. Гладкие помехи – это, например, шумы радиоэлектронных устройств. Эти помехи можно представить себе как результат действия большого количества малых хаотических импульсов, следующих настолько часто, что переходной процесс от каждого из них не успевает затухнуть к приходу следующего, в результате чего образуется единый незатухающий хаотический процесс. Частотный спектр флуктуационных помех часто считают равномерным в достаточно широкой полосе частот.
Следующее нередкое проявление случайностей в САУ – это заранее непредсказуемое изменение задающего воздействия. Например, для системы самонаведения ракеты задающим воздействие является азимут самолета, который она (ракета) намеревается уничтожить. Но траектория полета самолета заранее неизвестна не только ракете, но и самому летчику, задача которого при обнаружении нападения ракеты увильнуть от последней, совершая неожиданные маневры. Кроме этого, в более сложных, самонастраивающихся системах для идентификации отдельных звеньев могут применяться специально формируемые случайные воздействия, используемые для настройки системы и являющиеся полезными сигналами, предназначенными для получения дополнительной информации.
Наконец, случайным образом могут меняться и сами системы, в частности, их состав, связи между подсистемами, параметры последних.
Учет вышеперечисленных случайных изменений в САУ приводит к структурной схеме, приведенной на рис. 3.1.
143
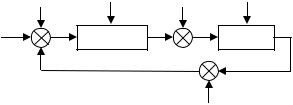
На этом рисунке случайными являются как помехи в каналах связи h1, h2, h3, так и само задающее воздействие g. Также случайными являются возможные вариации параметров регулятора δKр и объекта δKо.
h1 |
δKр |
h2 |
δKо |
g |
Регулятор |
|
Объект |
− |
|
||
|
|
|
|
|
|
h3 |
|
Рис. 3.1. Схема системы с учетом случайных воздействий
Все вышеизложенное делает необходимым применение статистических методов, основанных на статистических свойствах случайных процессов, происходящих в САУ.
3.1. Случайные события, величины и процессы
Вспомним основные понятия и формулы теории вероятности, которые потребуются для дальнейшего понимания излагаемых вопросов. В теории вероятности рассматриваются три класса вероятностных объектов: случайные события, случайные величины, и случайные функции.
3 . 1 . 1 . Случайные со бытия
Случайным событием А называется событие, которое может произойти, а может и не произойти. Характеризовать случайное событие можно частотой его появления. Если в N опытах m раз появилось событие А, то
144
говорят, что частота появления события А равна m N . Частота появления события А является, вообще говоря, также случайной величиной. При увеличении числа опытов N → ∞ частота появления события А стремится к некоторой неслучайной величине, называемой вероятностью появле-
N . Частота появления события А является, вообще говоря, также случайной величиной. При увеличении числа опытов N → ∞ частота появления события А стремится к некоторой неслучайной величине, называемой вероятностью появле-
ния события А − |
P(A). Эта вероятность удовлетворяет неравенству |
|
0 ≤ P(A)≤1. Если |
P(A)= 0 , |
событие называется невозможным, если |
P(A)=1 − достоверным. |
|
|
Если события A1, A2,...,Ak |
несовместимы, то есть любые два собы- |
|
тия не могут произойти в одном эксперименте, то вероятность P(A) события, заключающегося в появлении хотя бы одного из них, равна
P(A)= ∑k P(Ai ).
i=1
Если одно из событий A1, A2,...,Ak произойдет наверняка, то
P(A)= ∑k P(Ai )= 1 ,
i=1
итакая группа событий называется полной.
Если есть два события A и B, и появление события B влияет на вероятность появления события A, то соответствующая вероятность называется условной вероятностью и обозначается как P(A/ B) (вероятность события A при условии события B).
145