Материал: 6251
мостей, если они нежелательны. Во-вторых, эти звенья применяются для преодоления той жесткой зависимости между амплитудной и фазовой частотными функциями, которая существует в линейных звеньях, с целью независимого изменения каждой из этих функций. В последнем случае часто применяют так называемые псевдолинейные корректирующие звенья.
Псевдолинейные звенья – это нелинейные корректирующие звенья, эквивалентные амплитудная и фазовая характеристики которых не зависят от величины входного сигнала (потому и называются псевдолинейными) [6]. Основным свойством данной группы звеньев является практически отсутствующая связь между эквивалентными амплитудной и фазовой характеристиками. Как известно [7], у минимально-фазовых линейных звеньев есть взаимно однозначная связь между АЧХ и ФЧХ. Применение неминимально-фазовых звеньев позволяет менять АЧХ без изменения ФЧХ и наоборот, но только в ограниченных пределах. Псевдолинейные звенья позволяют произвольно формировать каждую из этих характеристик отдельно, что существенно облегчает проведение синтеза и создает новые возможности повышения устойчивости и качества переходных процессов.
В качестве примера псевдолинейного звена на рис. 2.33 приведена структурная схема звена, у которого ФЧХ практически равна нулю, а АЧХ задана.
На этой схеме звено 1 имеет релейную характеристику, 2 – фильтр низких частот ФНЧ, звено 3 вычисляет модуль сигнала x1, 4 – перемножитель. Сигнал x1 не зависит от амплитуды входного сигнала x благодаря релейному звену 1 и меняется с частотой в соответствии с амплитудночастотной характеристикой ФНЧ 2. Выходной сигнал y – это произведе136
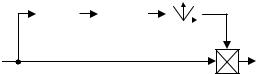
ние входного сигнала x на модуль x1. В итоге приведённая схема имеет независимую от амплитуды входного сигнала АЧХ, близкую к АЧХ фильтра низких частот, и нулевой фазовый сдвиг.
1 |
2 |
x1 |
3 |
|x1| |
|
sign |
|
ФНЧ |
|
||
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
4
x
y
Рис. 2.33. Нелинейный фильтр с амплитудным ослаблением
Нелинейная коррекция позволяет повышать качество САУ (в частности, линейных САУ) с результатом, принципиально недостижимым при линейной коррекции.
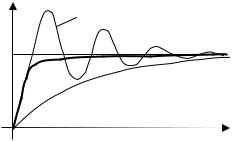
Например, в линейных системах существует известное противоречие между быстродействием и колебательностью. Увеличение быстродействия с помощью, скажем, повышения общего коэффициента усиления разомкнутой цепи приводит к большой (или недопустимой) колебательности. Можно, конечно, применить линейную коррекцию, которая позволит повысить верхний предел коэффициента усиления, но все же это не снимает противоречия между требованием повышения быстродействия и увеличения запаса устойчивости. На рис. 2.34 приведён пример двух переходных процессов в линейной системе (показаны пунктиром): 1 – с большим коэффициентом усиления, но с недопустимой колебательностью и 2 – с большим запасом устойчивости, но с малым быстродействием. Было бы замечательно реализовать такой переходной процесс, у которого начальный участок принадлежал первому процессу, а конечный
участок – второму (сплошная кривая).
137
h(t) 1
1
 2
2
t
Рис. 2.34. Переходной процесс при нелинейной коррекции
В рамках линейной теории такое невозможно, но если менять коррекцию в ходе переходного процесса так, чтобы при больших отклонениях от установившегося значения (в начале процесса) коррекция определялась только по соображениям быстродействия, а в конце (при малых отклонениях) – по требованиям запаса устойчивости и колебательности, то вполне возможно получение переходного процесса, приведённого на рис. 2.34. Но такая коррекция является уже нелинейной. Реализовать её можно либо релейным переключением корректирующих звеньев в системе в функции выходной величины или величины ошибки (тогда это будет самоорганизующаяся система или система с переменной структурой), либо с помощью нелинейных звеньев со специально подобранными характеристиками, изменяющими общий коэффициент усиления в процессе регулирования. Последняя цель достигается, например, последовательным включением в канал регулирования нелинейного звена с приведённой на рис. 2.35 характеристикой, меняющей коэффициент передачи разомкнутой цепи в функции сигнала ошибки.
Несмотря на отмеченные преимущества нелинейной коррекции, следует понимать, что она по своей природе более специализированная по
138
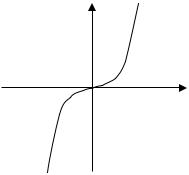
φ(x) kx3
x
Рис. 2.35. Нелинейное корректирующее звено
отношению к тем режимам, для которых применяется. Это означает, что нелинейная коррекция, выбранная для определённого типа внешнего воздействия, может оказаться не столь эффективной (а может быть и недопустимой) для других типов воздействий. К тому же не существует общей методики для выбора нелинейных корректирующих звеньев, и приходится пользоваться опытом и рекомендациями по применению отдельных частных приёмов и схем нелинейной коррекции, изложенных в многочисленной учебной и справочной литературе по теории автоматического управления.
Подведем некоторый итог данного раздела.
1.Все реальные системы являются, строго говоря, нелинейными. Деление систем на линейные и нелинейные зависит от степени идеализации при их математическом описании.
2.Нелинейности, которыми никогда нельзя пренебречь – это релейные и неоднозначные характеристики.
139
3.Динамика нелинейных систем значительно разнообразнее, чем линейных. В нелинейных системах существуют, например, такие специфические режимы, как автоколебания.
4.Если линейные системы могут быть устойчивыми или неустойчивыми, то в нелинейных системах речь может идти об устойчивости или неустойчивости отдельных режимов работы при определённых внешних воздействиях и (или) начальных условиях. При этом различают следующие виды устойчивости: асимптотическую, в малом (по Ляпунову), в большом, в целом, абсолютную.
5.В нелинейных системах не выполняется принцип суперпозиции, поэтому не существует общей теории нелинейных систем, имеются лишь некоторые частные методы исследования таких систем.
6.К точным методам исследования нелинейных систем относятся метод фазовой плоскости, метод точечных преобразований, второй (прямой) метод Ляпунова, частотный критерий Попова.
7.Приближёнными методами являются: первый метод Ляпунова, метод интегрируемой аппроксимации, метод гармонической линеаризации, методы малого параметра.
8.Качество нелинейных систем оценивается по тем же критериям, что и линейных систем: время переходного процесса, колебательность, степень устойчивости, полоса пропускания и др. Для оценки качества переходных процессов могут применяться: метод гармонической линеаризации, прямой метод Ляпунова, частотный критерий абсолютной устойчивости В.М. По́пова, для систем второго порядка – метод фазовой плоскости.
140