Материал: 2478
НАЗЕМНЫЙ ТРАНСПОРТ
относительно одного из них. При изучении кинематики механизмов решаются две противоположные задачи [4].
1.В заданном механизме найти траектории, скорости и ускорения движения отдельных точек (задача кинематического анализа).
2.По известному закону движения отдельных звеньев спроектировать механизм (задача кинематического синтеза).
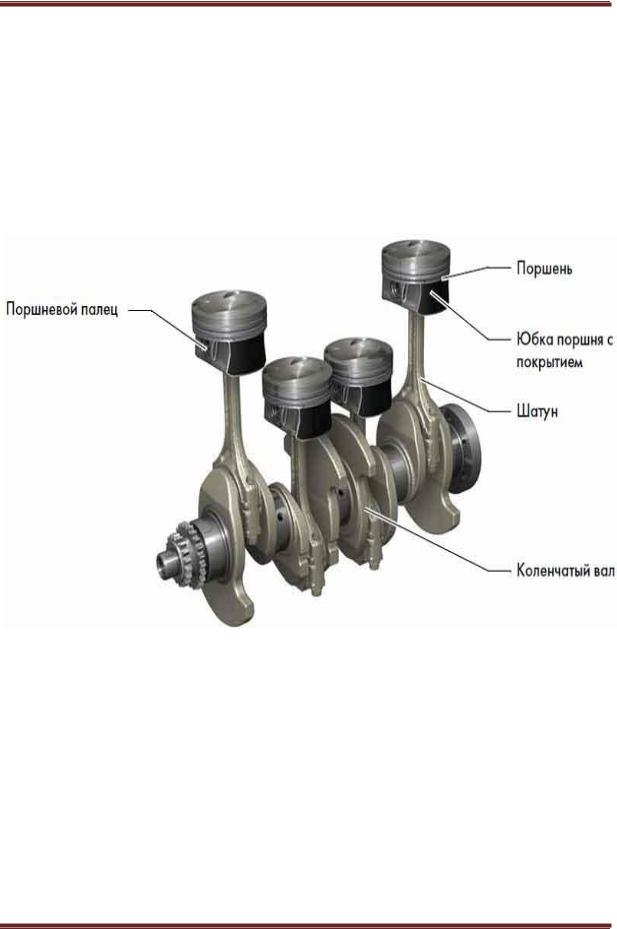
Кинематический анализ и синтез механизмов выполняется графическим и аналитическим методами. Рассмотрим задачу кинематического анализа на примере исследования кривошипно-шатунного механизма. Кривошипно-шатунный механизм (КШМ) предназначен для преобразования возвратно-поступательного движения поршня во вращательное движение (например, во вращательное движение коленчатого вала в двигателях внутреннего сгорания), и наоборот (рис. 1).
Рис. 1. Кривошипно-шатунный механизм двигателя
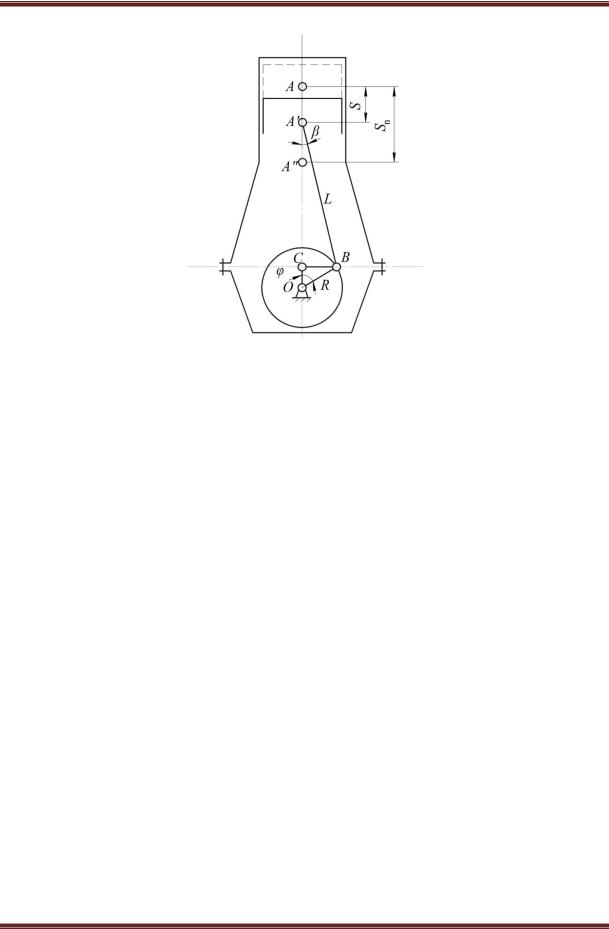
На рисунке 2 приведена схема кривошипно-шатунного механизма [2]. Разберем ее более подробно.
Техника и технологии строительства, № 3 (7), 2016 |
http://ttc.sibadi.org/ |
НАЗЕМНЫЙ ТРАНСПОРТ
Рис. 2. Схема кривошипно-шатунного механизма
Изменение направления движения поршня в цилиндре происходит в верхней и нижней мертвых точках (ВМТ – крайнее положение поршня, при котором он максимально удален от оси коленчатого вала (точка А); НМТ – крайнее положение поршня в цилиндре, при котором он
минимально удален от оси коленчатого вала (точка A )). В мертвых точках скорость поршня
равняется нулю, а ускорение достигает максимальной величины [5,6]. |
|
|
|
|||
|
Отрезок ОВ является радиусом R кривошипа, длина отрезка B A равна длине шатуна L, |
|||||
а |
угол поворота коленчатого вала (рисунок. 2). |
|
|
|
||
|
Расстояние между мертвыми точками по оси цилиндра – ход поршня. Полный ход поршня |
|||||
S n |
2 R . |
угол отклонения оси шатуна от оси цилиндра. Значение |
|
R |
отношение |
|
L |
||||||
|
|
|
|
|
||
радиуса кривошипа к длине шатуна (конструктивный параметр двигателя). Для современных двигателей величина может находиться в пределах 1/3 – 1/4.
Зависимость между углом поворота коленчатого вала (град) и соответствующим ему временем t (с) выражается формулой
|
|
2 n |
|
180 n t |
6 n t , |
(1) |
||
|
t |
|
t |
|
|
|
||
|
60 |
30 |
||||||
|
|
|
|
|
|
|
||
где |
угловая скорость |
вращения |
коленчатого вала, с-1; n |
частота вращения |
||||
коленчатого вала, мин-1.
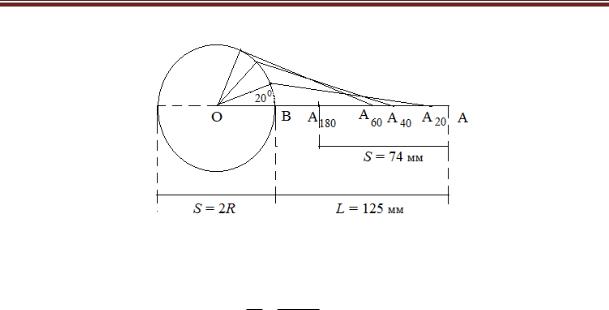
Найдем перемещение (S) и скорость ( ) поршня графическим методом. Выполним чертеж КШМ в масштабе (1:1) (рис. 3).
1)На миллиметровой бумаге рисуем окружность радиуса R=OB=37 мм (радиус кривошипа).
2)Длина шатуна L=BА=125 мм.
3)Частота вращения кривошипа n=6000 мин-1 (оборотов в минуту)
4)Возьмем угол поворота кривошипа =200 ( 0 360 0 ) (следовательно, будет 18
участков для определения скорости).
5)Для каждого угла поворота находим перемещение поршня S (мм), затем ∆S (м).
Техника и технологии строительства, № 3 (7), 2016 |
http://ttc.sibadi.org/ |
НАЗЕМНЫЙ ТРАНСПОРТ
Рис.3. Определение пути, пройденного поршнем в зависимости от положения кривошипа (угла )
6)Приращение аргумента (малый промежуток времени):
20
t 0 ,0006 (с)
6 n 6 6000
7)Проводим измерения и заполняем таблицу 1:
Чтобы определить скорость поршня при повороте кривошипа от 0 до 3600 в интервале через 200, необходимо приращение пути ∆S (м) на каждом участке разделить на приращение аргумента ∆t = 0,0006 с (участки пронумерованы в таблице 1, так, например, участок 1
|
соответствует изменению угла φ: 0 |
20 , 2 |
– 20 |
40 |
и т.д.). |
Полученное значение |
||||||||||||||
|
средней скорости |
|
(м/с) на |
каждом |
участке |
занесем |
в |
таблицу |
1. Например: 0 |
0 , |
||||||||||
|
|
|
2 ,9 10 |
3 |
, 2 |
|
8 ,02 10 3 |
13 ,37 и т.д. |
|
|
|
|
|
|
|
|
||||
|
1 |
|
|
|
|
4 ,83 |
|
|
|
|
|
|
|
|
|
|
|
|||
0 ,0006 |
|
|
0 ,0006 |
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
Таблица 1 – Расчет перемещения и скорости поршня |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Перемещение |
|
Номер участка |
|
|
Приращение хода |
|
Скорость поршня |
|||||||
|
|
φ, град |
|
|
|
приращения хода |
|
|
поршня |
|
|
|||||||||
|
|
|
|
поршня S, мм |
|
|
|
|
|
, м/с |
|
|||||||||
|
|
|
|
|
|
|
поршня |
|
|
|
∆S, м. |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
0 |
|
|
|
0 |
|
|
|
|
0 |
|
|
|
0 |
|
|
0 |
|
|
|
|
20 |
|
|
|
2,90 |
|
|
|
1 |
|
|
|
2,9·10-3 |
|
|
4,83 |
|
|
|
|
|
40 |
|
|
|
10,92 |
|
|
|
2 |
|
|
|
8,02·10-3 |
|
|
13,37 |
|
|
|
|
|
60 |
|
|
|
22,61 |
|
|
|
3 |
|
|
|
11,69·10-3 |
|
|
19,48 |
|
|
|
|
|
80 |
|
|
|
35,91 |
|
|
|
4 |
|
|
|
13,3·10-3 |
|
|
22,17 |
|
|
|
|
|
100 |
|
|
|
48,71 |
|
|
|
5 |
|
|
|
12,8·10-3 |
|
|
21,33 |
|
|
|
|
|
120 |
|
|
|
59,61 |
|
|
|
6 |
|
|
|
10,9·10-3 |
|
|
18,17 |
|
|
|
|
|
140 |
|
|
|
67,61 |
|
|
|
7 |
|
|
|
8·10-3 |
|
|
13,33 |
|
|
|
|
|
160 |
|
|
|
72,38 |
|
|
|
8 |
|
|
|
4,77·10-3 |
|
|
7,95 |
|
|
|
|
|
180 |
|
|
|
74,00 |
|
|
|
10 |
|
|
|
1,62·10-3 |
|
|
2,70 |
|
|
|
|
|
200 |
|
|
|
72,38 |
|
|
|
11 |
|
|
|
-1,62·10-3 |
|
|
-2,70 |
|
|
|
|
|
220 |
|
|
|
67,61 |
|
|
|
12 |
|
|
|
-4,77·10-3 |
|
|
-7,95 |
|
|
|
|
|
240 |
|
|
|
59,61 |
|
|
|
1 |
|
|
|
-8·10-3 |
|
|
-13,33 |
|
|
|
|
|
260 |
|
|
|
48,71 |
|
|
|
3 |
|
|
|
-10,9·10-3 |
|
|
-18,17 |
|
|
|
|
|
280 |
|
|
|
35,91 |
|
|
|
14 |
|
|
|
-12,8·10-3 |
|
|
-21,33 |
|
|
|
|
|
300 |
|
|
|
22,61 |
|
|
|
15 |
|
|
|
-13,3·10-3 |
|
|
-22,17 |
|
|
|
|
|
320 |
|
|
|
10,92 |
|
|
|
16 |
|
|
|
-11,69·10-3 |
|
|
-19,48 |
|
|
|
|
|
340 |
|
|
|
2,90 |
|
|
|
17 |
|
|
|
-8,02·10-3 |
|
|
-13,37 |
|
|
|
|
|
360 |
|
|
|
0,00 |
|
|
|
18 |
|
|
|
-2,9·10-3 |
|
|
-4,83 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
19 |
|
|
|
0 |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
Техника и технологии строительства, № 3 (7), 2016 |
|
http://ttc.sibadi.org/ |
|||||||||||||||||
|
|
|
НАЗЕМНЫЙ ТРАНСПОРТ |
||
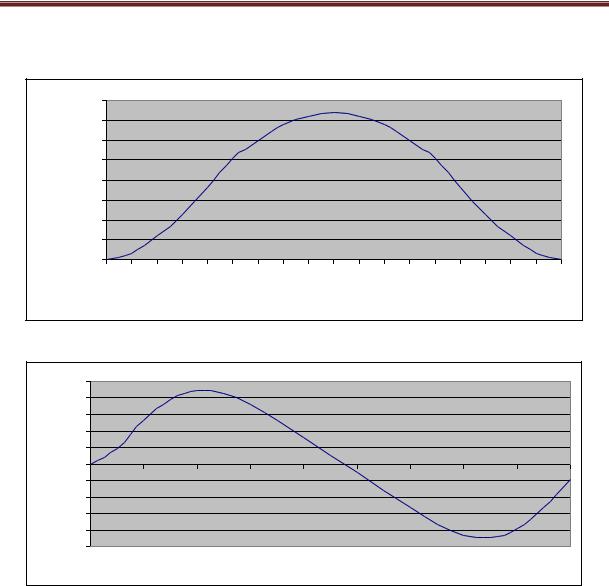
По данным таблицы 1 строим график перемещения (рисунок 4) и скорости поршня |
|||||
(рис. 5). |
|
|
|
|
|
80 |
|
|
|
|
|
70 |
|
|
|
|
|
60 |
|
|
|
|
|
50 |
|
|
|
|
|
S, в мм 40 |
|
|
|
|
|
30 |
|
|
|
|
|
20 |
|
|
|
|
|
10 |
|
|
|
|
|
0 |
|
|
|
|
|
0 |
20 |
40 |
60 |
80 |
100 120 140 160 180 200 220 240 260 280 300 320 340 360 |
|
|
|
|
|
φ, в град |
|
|
|
Рис. 4. График перемещения поршня |
|
|
|
||||
25 |
|
|
|
|
|
|
|
|
|
|
20 |
|
|
|
|
|
|
|
|
|
|
15 |
|
|
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
V, в м/с 0 |
|
|
|
|
|
|
|
|
|
|
-5 |
0 |
40 |
80 |
120 |
160 |
200 |
240 |
280 |
320 |
360 |
-10 |
|
|
|
|
|
|
|
|
|
|
-15 |
|
|
|
|
|
|
|
|
|
|
-20 |
|
|
|
|
|
|
|
|
|
|
-25 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
φ, в град |
|
|
|
|
|
Рис. 5. График скорости поршня
Аналитическим методом исследования плоских механизмов пользуются в том случае, когда задана необходимая точность решения задачи. Для нашей задачи исходными параметрами являются: угловая скорость кривошипа ( ) и размеры звеньев механизма: длина шатуна
(L=BА=125 мм), радиус кривошипа (R=OB=37 мм). Величина |
R |
|
|
37 |
0 , 296 . |
|
L |
125 |
|||||
|
|
|
||||
Зависимость перемещения поршня от угла поворота коленчатого вала выражается формулой [5,6]:
S |
R (1 cos |
) |
R |
(1 cos |
2 ) . |
(2) |
|
4 |
|||||||
|
|
|
|
|
|
Тогда скорость точки В в этот момент можно найти как производную функции S по времени t
(физический смысл производной). При этом необходимо помнить, |
что |
|
– угол поворота |
|||||||||||||||||||
коленчатого вала зависит от времени t. Тогда функция S S S t , следовательно: |
||||||||||||||||||||||
|
dS |
|
|
dS |
|
d |
|
|
|
|
dS |
|
|
|
R |
|
|
|
|
|
|
|
|
dt |
|
|
d |
|
dt |
|
|
|
d |
|
R (1 |
cos ) |
4 |
(1 cos 2 |
) |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
R |
sin |
|
|
|
|
|
sin 2 2 |
R sin |
|
|
sin 2 |
. |
|
|
||||||
|
|
4 |
|
2 |
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Техника и технологии строительства, № 3 (7), 2016 |
|
|
|
|
http://ttc.sibadi.org/ |
|||||||||||||||||

НАЗЕМНЫЙ ТРАНСПОРТ
В процессе вычислений воспользовались |
соотношением: |
|
d |
– угловая |
скорость |
||
|
|||||||
|
|
|
|
|
dt |
|
|
вращения коленчатого вала в рассматриваемый момент времени. Таким образом, |
|
||||||
|
|
|
|
|
|
|
|
R sin |
|
sin |
2 . |
|
|
|
(3) |
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
Рассуждая аналогично, найдем ускорение поршня как первую производную скорости или вторую производную перемещения. По формуле:
a |
d |
|
d |
|
|
dt |
d |
||||
|
|
|
Следовательно,
|
d |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
R |
2 |
cos |
|
cos |
2 . |
||||||||
a |
|
|
|
|
R |
sin |
|
|
|
sin |
2 |
|
|
R |
|
cos |
|
|
|
2 cos |
2 |
|
|
|||||
|
|
|
|
|
||||||||||||||||||||||||
|
d |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Заключение
В результате проделанной работы мы показали процесс кинематического анализа кривошипно-шатунного механизма, связанного с нахождением пути и скорости и поршня графическим и аналитическим методами. При решении поставленной задачи графическим
методом мы, построив диаграмму перемещения, соответствующую функции S S , построили диаграмму скорости , воспользовавшись графическим дифференцированием графика пути. Также мы решили поставленную задачу аналитическим методом, непосредственно применив
правила дифференцирования функции |
S S |
для нахождения скорости , и функции |
для нахождения ускорения |
a a . |
Таким образом, мы показали практическое |
применение дифференциального исчисления в решении задач кинематического анализа механизмов и продемонстрировали физический смысл первой и второй производных. Физический смысл первой производной – скорость изменения данной функции в данной точке. В соответствии с физическим смыслом производной, вторая производная – скорость изменения первой производной, т.е., согласно физическим терминам, ускорение изменения исходной функции
Библиографический список
1. Полякова, Т.А. Реализация прикладной направленности на занятиях по высшей математике в техническом вузе / Т.А. Полякова // Фундаментальные и прикладные науки – основа современной инновационной системы: материалы международной научно-практической конференции студентов, аспирантов и молодых ученых. – Омск : СибАДИ, 2015. – С. 287-292.
2. Черников, Д.И. Нахождение работы двигателя с помощью определенного интеграла; Д.И. Черников, Т.А. Полякова // Техника и технологии строительства. – Омск: СибАДИ, 2015. – Т.1. – С. 116-124.
3.Полякова, Т.А. Решение дифференциальных уравнений свободных и вынужденных крутильных колебаний вала с одной массой / Т.А. Полякова // Вестник СибАДИ. – 2012. – № 4 (26). – С. 91-94.
4.Агиенко, Д.М. Прикладная механика: учебное пособие. – Новосибирск: Изд-во Новосибирского университета, 1993. – 165 с.
5.Макушев, Ю.П. Расчет систем и механизмов двигателей внутреннего сгорания математическими методами / Ю.П. Макушев, Т.А. Полякова, Л.Ю. Михайлова и др.: учебное пособие. – Омск: СибАДИ, 2011.
–284 с.
6. Интегральное и дифференциальное исчисления в приложении к технике: монография / Ю.П. Макушев, Т.А. Полякова, В.В. Рындин, Т.Т. Токтаганов; под ред. Ю.П. Макушева. – Павлодар : Кереку, 2013. – 330 с.
APPLICATION OF MATHEMATICAL METHODS IN THE KINEMATIC ANALYSIS
OF MECHANISMS OF THE VEHICLE ENGINE
A.E. Prosekov
Техника и технологии строительства, № 3 (7), 2016 |
http://ttc.sibadi.org/ |