Материал: 2471
Таблица 4.2
Определение пути, скорости, ускорения поршня в зависимости от угла поворота коленчатого вала
φ, |
|
Путь, м |
|
Скорость, м/с |
|
Ускорение, м/с2 |
|
|||||
град |
Знак |
A |
S |
S* |
Знак |
B |
V |
V* |
Знак |
C |
j |
J* |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
+ |
0,0 |
0,0 |
|
+ |
0,0 |
0,0 |
|
+ |
1,26 |
24850 |
|
30 |
+ |
0,17 |
0,008 |
|
+ |
0,61 |
19 |
|
+ |
1,0 |
19720 |
|
60 |
+ |
0,60 |
0,03 |
|
+ |
0,98 |
31 |
|
+ |
0,37 |
7300 |
|
90 |
+ |
1,13 |
0,056 |
|
+ |
1,0 |
32 |
|
+ |
0,27 |
5324 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
360 |
|
|
|
|
|
|
|
|
|
|
|
|
В табл. 4.3 приведены результаты кинематического расчета на ЭВМ двигателя на базе ВАЗ-2108 с частотой вращения 4900 мин-1, угловой скоростью 513 с-1, = 0,26 и радиусом кривошипа 0,035 м.
|
|
|
Таблица 4.3 |
Результаты кинематического расчета двигателя |
|||
|
|
|
|
φ, град |
S,м |
V,м/с |
J,м/с2 |
0 |
0,000 |
0,000 |
11765,45 |
30 |
0,006 |
11,153 |
9300,542 |
60 |
0,021 |
17,817 |
3454,933 |
90 |
0,040 |
18,207 |
-2427,79 |
120 |
0,057 |
13,718 |
-5882,72 |
150 |
0,067 |
7,054 |
-6872,75 |
180 |
0,071 |
0,000 |
-6909,87 |
210 |
0,067 |
-7,054 |
-6872,75 |
240 |
0,057 |
-13,718 |
-5882,72 |
270 |
0,040 |
-18,207 |
-2427,79 |
300 |
0,021 |
-17,817 |
3454,933 |
330 |
0,006 |
-11,153 |
9300,542 |
360 |
0,000 |
0,000 |
11765,45 |
На рис. 4.3, 4.4, 4.5 показаны графики изменения перемещения поршня, его скорости и ускорения [8]. Применение быстродействующих ЭВМ позволяет уменьшить шаг расчета до 10 и менее, что повысит точность расчета.
213
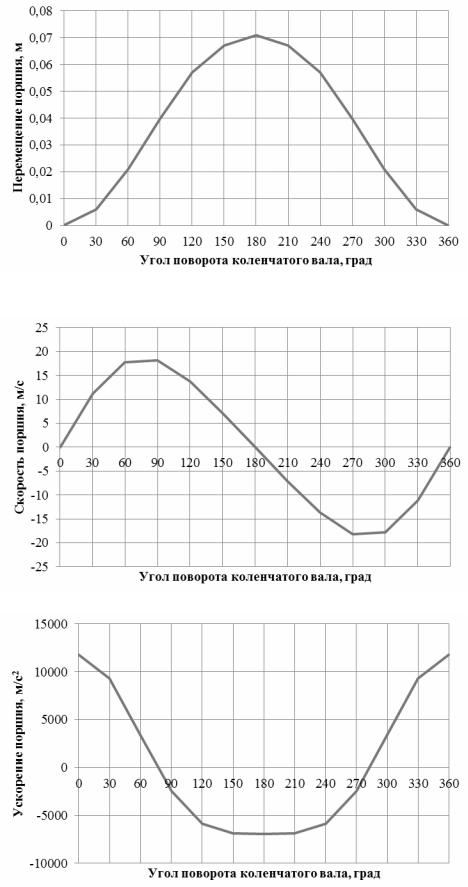
Рис. 4.3. Изменение перемещения поршня
Рис. 4.4. Изменение скорости поршня
Рис. 4.5. Изменение ускорения поршня
214

4.4. Приближенные вычисления пути, скорости, ускорения поршня
При расчете коленчатого вала на крутильные колебания и анализе уравновешенности двигателя выражения для определения S, V, j желательно иметь в виде функции только угла поворота коленчатого вала φ.
Из анализа рис. 4.2 следует, что
BC R sin L sin ; |
|
||
sin |
R |
sin sin . |
(4.16) |
|
|||
|
L |
|
|
Воспользовавшись основным тригонометрическим тождеством sin2 cos2 1, получим
|
|
|
1 2 sin2 1/2 . (4.17) |
|
cos |
1 sin2 |
|
1 2 sin2 |
|
Разложим выражение (4.17) в ряд по формуле бинома Ньютона, получим
|
1 |
2 |
2 |
|
1 |
4 |
4 |
|
|
cos 1 |
|
sin |
|
|
|
sin |
|
. |
(4.18) |
2 |
|
8 |
|
||||||
|
|
|
|
|
|
|
|
||
При λ = 0,25 и 900 |
второй член разложения составляет от |
||||||||
первого 3 % , а третий 0,05 %. Поэтому с достаточной для практики степенью точности считаем, что
1 |
|
2 |
|
2 |
. |
|
|
(4.19) |
||
cos 1 |
|
|
|
sin |
|
|
|
|||
|
|
|
|
|
||||||
2 |
|
|
|
|
|
|
|
|
|
|
Преобразуем выражение (4.3) |
S R [(1 |
1 |
) (cos |
1 |
cos )]. |
|||||
|
|
|||||||||
|
|
|
|
|
|
|
|
|
||
Для этого раскроем скобки и сгруппируем слагаемые следующим образом:
S R 1 cos R 1 cos .
Тогда с учетом выражения (4.19) получим
S R (1 cos ) |
R |
1 |
|
2 |
|
2 |
|
|
|
|
|
1 1 |
|
|
|
sin |
|
|
|
, |
|
|
2 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
||
215

S R (1 cos ) R 2 sin2 ,
2
|
S R (1 cos ) |
R |
sin |
2 |
. |
|
|||
|
|
|
|
|
|||||
2 |
|
|
|
|
|
||||
Так как sin2 |
1 cos2 |
, то |
|
|
|
|
|||
|
|
|
|
|
|||||
2 |
|
|
|
|
|
|
|
|
|
|
S R (1 cos ) |
R |
(1 cos2 ) . |
(4.20) |
|||||
|
|
||||||||
4 |
|
|
|
|
|
||||
Формула (4.20) показывает, что перемещение поршня можно условно представить состоящим из 2-х гармонических перемещений S S1 S2 , где S1 R 1 cos − перемещение поршня первого порядка, если бы шатун имел бесконечно большую длину, зависящую от
величины радиуса); |
S2 R 1 cos2 /4 − перемещение поршня |
второго порядка или |
дополнительное перемещение, зависящее от ко- |
нечной длины шатуна и определяемое вторым членом бинома. |
|
Для приближенных расчетов изменения хода поршня выражение
(4.20) можно представить в упрощенном виде |
|
S R 1 cos . |
(4.21) |
Полный ход поршня от ВМТ до НМТ останется без изменения и будет равен 2R. Незначительно изменятся промежуточные значения хода поршня в результате отсутствия влияния отклонения шатуна от оси цилиндра на перемещение поршня. Считаем, что шатун имеет бесконечно большую длину.
Для определения хода поршня необходимо знать значение cos φ при различных углах поворота кривошипа φ. В табл. 4.4 приведены значения cos φ для некоторых углов φ.
Таблица 4.4
Значения функции cos φ
φ, |
0 |
30 |
60 |
90 |
120 |
150 |
180 |
210 |
240 |
270 |
330 |
360 |
град |
|
|
|
|
|
|
|
|
|
|
|
|
cos φ |
1 |
0,86 |
0,5 |
0 |
-0,5 |
-0,86 |
-1 |
-0,86 |
-0,5 |
0 |
0,86 |
1 |
Определив путь по формуле (4.20), находим скорость и ускорение поршня как первую и вторую производную пути по времени. При
216
этом воспользуемся таблицей производных (табл. П.1.1) и формулами
(4.4), (4.11).
|
dS |
|
dS |
|
R |
|
|
|
V |
|
|
|
R (1 cos ) |
|
(1 cos2 ) |
|
|
dt |
d |
4 |
|
|||||
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
R sin |
|
sin2 2 |
|
R sin |
|
sin2 . |
|
4 |
2 |
||||||
|
|
|
|
|
Таким образом,
|
|
|
|
|
V R sin |
|
sin2 . |
(4.22) |
|
2 |
||||
|
|
|
Рассуждая аналогично, найдем ускорение поршня как первую производную скорости или вторую производную перемещения. По
формуле (4.11): j |
dV |
|
dV |
. Следовательно, |
|
|
|
||||||
dt |
|
|
|
|
|||||||||
|
|
|
|
d |
|
|
|
|
|
|
|||
|
dV |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
2 |
|
||||||||
j |
|
R sin |
|
|
sin2 R |
|
cos |
|
2 cos2 |
|
|||
d |
2 |
|
2 |
||||||||||
|
|
|
|
|
|
|
|
|
|
||||
R 2 cos cos2 .
Таким образом,
j R 2 cos cos2 . |
(4.23) |
В результате проделанной работы мы осуществили вывод формул для определения пути, скорости, ускорения поршня в зависимости от угла поворота коленчатого вала с использованием производных, а также показали их практическое применение.
Контрольные вопросы
1.Как определяется ход (путь) поршня в зависимости от радиуса кривошипа и длины шатуна?
2.Как находят скорость и ускорение поршня?
3.С какой целью вычисляют путь, скорость, ускорение поршня?
4.Как по средней скорости поршня определяют быстроходность двигателя?
5.Зачем вычисляют путь, скорость, ускорение поршня в зависимости только от угла поворота коленчатого вала?
6.Как найти максимальную величину силы инерции от движущихся масс КШМ ?
217