Материал: 2451
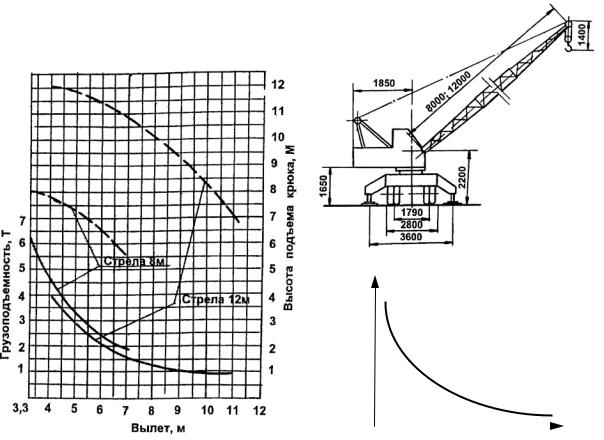
Для кранов с телескопической стрелой грузовые характеристики преобразуются в характеристики отключения ограничителя при измерении нагрузки по оси гидроцилиндра подъёма стрелы. Поэтому ин-
формацию о массе поднимаемого груза получают путём преобразования разности давлений в поршневой и штоковой полостях гидроци- Слиндра специальным гидромеханическим преобразователем в усилие, измеряемое датчиком усилия, либо путём непосредственного измерения давления в поршневой и штоковой полостях гидроцилиндра [2, 6].
Также вылет крюка R не может быть измерен непосредственно, поэтому в современных ограничителях он контролируется измерени-
ем угла наклона стрелы α и, в случае телескопической стрелы, длины стрелы l.
Поэтому для ра оты ограничителя грузоподъёмности на кранах с решетчатой стрелой нео ходимо преобразовать грузовую характе-
крана Qmax = f1(R) в характеристику отключения ограничи-
теля F = f (α) (р |
с. 3.3). |
|
ристикуmax 2 |
|
|
а |
|
б |
б |
|
|
|
|
КС-2561К: |
|
А l = 8 м |
|
|
|
КС-2561К1: |
|
|
l = 12 м |
|
Д |
|
|
Fmax, H |
в |
|
|
И |
α, °
Рис. 3.3. Параметры и характеристики крана КС-2561К(1):
а – грузовые характеристики; б – схема крана; в – характеристика отключения ограничителя грузоподъёмности
36
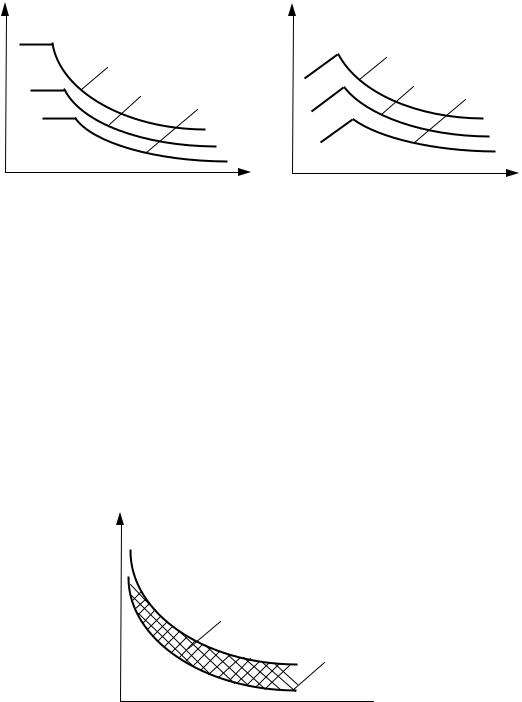
Для кранов с телескопической стрелой грузовые характеристики и характеристики отключения представляют в виде нескольких гра-
фиков Fmax = f2(α), каждый из которых соответствует определенной длине стрелы l. Криволинейные участки графиков соответствуют допустимым условиям опрокидывания, прямые линии – ограничениям по условиям прочности конструкции (рис. 3.4) [2, 6].
Qmax, т |
а |
Fmax, H |
|
б |
||
|
|
|
|
|||
|
|
l1 |
(Pmax, МПа) |
|
l1 |
|
и |
|
|
|
l2 > l1 l3 > l2 |
||
Сl2 > l1 |
l3 > l2 |
|
|
|||
|
б |
|
α, ° |
|||
|
|
|
R, м |
|
|
|
|
Р с. 3.4. Характеристики крана с телескопической стрелой: |
|||||
а – грузовые характер |
стики; |
– характеристики отключения ограничителя |
||||
|
А |
грузоподъёмности |
||||
Характеристики |
отключения |
ограничителя |
|
|||
строятся для случая максимальной нагрузки Qmax |
и нагрузки 1,1Qmax, |
|||||
полагая, что в зоне, расположенной ниже графика Qmax, ограничитель |
||||||
должен разрешать работу крана, а выше графика 1,1Qmax – запрещать. В |
||||||
|
|
|
Д |
|||
зоне между графиками, называемой |
зоной отключения, возможно лю- |
|||||
бое состояние ограничителя (рис. 3.5). Эта зона используется на случай возникновения всевозможных погрешностей ограничителя, узлов его привязки к крану и разброса параметров последнего, в связи с чем
функция отключения рассчитывается на среднее значение ~l,05Qmax. И Для этого значения проводится настройка ограничителя [2, 6].
для 1,1Qmax  для Qmax
для Qmax
α, °
Рис. 3.5. Зона отключения ограничителя грузоподъёмности
37

3.5. Электронный ограничитель грузоподъёмности ОГБ-2 (ОНК-М)
К самым распространенным электронным ограничителям грузо- |
||||
подъёмности, устанавливаемым на кранах с решетчатой стрелой, от- |
||||
носится ОГБ-2 (рис. 3.6). Существует более 40 модификаций данного |
||||
С |
|
|
|
|
ограничителя, каждая из которых предназначена для определенного |
||||
типа крана [6]. |
|
|
|
|
и |
|
3 |
|
|
б |
|
2 |
||
|
|
4 |
|
|
|
|
|
|
|
1 |
А |
|
||
|
|
|
|
|
Рис. 3.6. Внешний вид ограничителяДгрузоподъёмности ОГБ-2
Ограничитель грузоподъёмности ОГБ-2 является системой автоматической защиты и предназначен для установкиИна краны с решетчатой стрелой (в том числе башенные) [6].
ОГБ-2 обеспечивает защиту от опрокидывания крана при перегрузке путём сравнения сигналов с датчиков усилия и угла. Защита срабатывает как при попытке подъёма груза массы, превышающей грузоподъёмность крана, так и при попытке увеличения вылета стрелы с грузом, который кран смог поднять, но при этом происходит выход из грузовой характеристики крана.
ОГБ-2 отображает опрокидывающий момент в процентах от предельного при данном вылете с помощью стрелочного прибора. Также на панели расположены две лампы, сигнализирующие режимы работы прибора – работа разрешена или запрещена.
38
Ограничитель при перегрузке автоматически отключает цепи питания приводов механизмов подъёма груза и механизмов, продолжение работы которых направлено на снижение устойчивости крана.
В состав ограничителя ОГБ-2 входят [6]:
• блок управления БУ – 1; |
|
|
С |
|
|
• |
датчик усилия ДУС – 2; |
|
• датчик угла ДУГ – 3; |
|
|
• |
панель с гнал зации ПС – 4. |
|
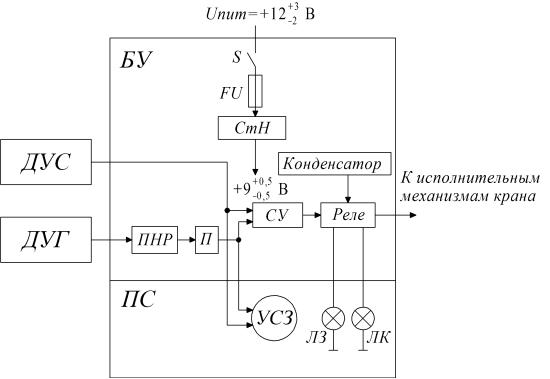
Функц ональная схема ОГБ-2 изображена на рис. 3.7. |
||
и |
|
|
|
б |
|
|
А |
|
|
Д |
|
Рис. 3.7. Функциональная схема ограничителя грузоподъёмности ОГБ-2 |
||
Блок управления устанавливается в кабине машиниста. В состав |
||
БУ входят (см. рис. 3.7) [6]: |
И |
|
•тумблер включения S;
•предохранитель FU;
•стабилизатор напряжения СтН;
•переключатель характеристик П;
•плата настроечных резисторов ПНР;
•сравнивающее устройство СУ;
•реле;
•конденсатор, включенный параллельно обмотке реле.
39
Стабилизатор СтН обеспечивает при напряжении бортовой сети
от 10 до |
15 В постоянного тока стабилизированное напряжение |
9 ± 0,5 В, необходимое для питания ДУС, ДУГ, СУ. |
|
Переключатель П предназначен для выбора характеристики от- |
|
ключения ограничителя в зависимости от режима работы крана (на |
|
опорах, со вставками для увеличения длины стрелы, без опор). В з а- |
|
С |
|
висимости от выбранного режима переключатель подключает к дат- |
|
чику угла пару настроечных резисторов, позволяющих регулировать |
|
крутизну |
смещен е характеристики отключения ограничителя гру- |
зоподъёмности относ тельно осей координат F и α. В процессе работы крана положен е переключателя должно оставаться неизменным.
равн вающее устройство СУ принимает выходные сигналы
датчика угла |
датч ка усилия. Выходной сигнал СУ поступает на ре- |
ле, которое управляет сполнительными механизмами крана. Конден- |
|
сатор увел ч вает время сра атывания и время отпускания реле, что- |
|
бы огран ч тель грузоподъёмности не реагировал на кратковремен- |
|
ныеизмененя |
агрузки. |
В ОГБ-2 пр меняются есконтактные трансформаторные преоб- |
||
разователи параметров крана, выполненные на дискретных элементах |
||
А |
|
|
(диодах, транзисторах, резисторах) и имеющие высокую надежность. |
||
Датчикбусилия ДУС предназначен для преобразования прило- |
||
женного к нему усилия в напряжение постоянного тока [6]: |
|
|
UДУС = К ·F, |
|
(3.3) |
ДУС |
|
|
где UДУС – выходное напряжение датчика усилия; F – |
сила, прило- |
|
женная к датчику усилия; КДУС – коэффициент преобразования. |
|
|
Датчик усилия обычно устанавливается на силовых элементах |
||
крепления стрелы, в частности, на стреловом полиспасте (рис. 3.8, а) |
||
с помощью растяжек (рис. рис. 3.8, б); при этом одновременно учиты- |
||
И |
||
вается масса стрелы. Место установки растяжек и расстояние между ними указываются в конструкторской документации.
ДУС работает на растяжение и состоит из пыле- и брызгозащищитного корпуса; упругого кольца, деформация которого пропорциональна величине действующего на него усилия; трансформаторного преобразователя, преобразующего деформацию кольца в пропорциональную величину электрического сигнала [6].
Датчик угла ДУГ преобразует угол наклона стрелы в постоянное напряжение [6]:
UДУГ = КДУГ·α, |
(3.4) |
где UДУГ – выходное напряжение датчика угла; α – угол наклона стрелы; КДУГ – коэффициент преобразования.
40