Материал: 2451
а б
Си 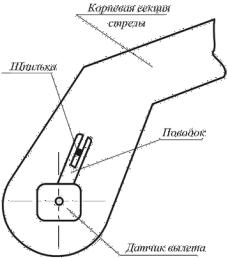 б в
б в
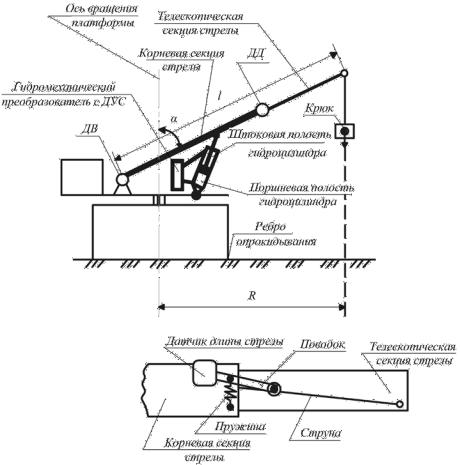
а– общая схема расположенияА; б – датчик вылета у основания стрелы;
в– датчик длины стрелыДна корневой секции стрелы
ВОГБ-3, как и в ОГБ-2, применяются бесконтактные трансформаторные преобразователи параметров крана, выполненные на дискрет-
ных элементах (диодах, транзисторах, резисторах) и имеющие высокую надежность [6]. И
Датчик длины стрелы ДД устанавливается на корневой секции стрелы. Ролик, закрепленный на конце вращающего вал датчика поводка, прижимается к струне пружиной и перемещается по струне, натянутой на телескопической части стрелы (рис. 3.11, в). Благодаря тому, что струна натянута по диагонали, при выдвижении телескопа происходит поворот вала датчика. Иногда вместо одного используются три ролика, между которыми проходит струна. Пружина при этом отсутствует. ДД длину стрелы преобразует в электрический сигнал.
ДДсостоит из двух каналов. Первый канал ДД1 предназначен для получения сигнала, пропорционального длине стрелы. Этот сигнал поступает на указатель длины стрелы в панели сигнализации. Второй
46
канал ДД2 предназначен для получения сигнала, являющегося функцией величины допустимого усилия, воспринимаемого ДУС. Этот сигнал участвует в формировании характеристики отключения. ДД содержит вращающийся профильный экран, взаимодействующий с блоками катушек двух трансформаторных преобразователей: ДД1 и ДД2. Особенностью ДВ является питание преобразователя ДВ2 напряжением с выхода ДД2.
Датчик вылета (угла наклона стрелы α) ДВ устанавливается так,
чтобы вал датч ка находился на одной прямой с осью вращения стре- |
||
лы (рис. 3.11, б). Вращение стрелы при ее подъёме и опускании пере- |
||
дается датч ку с помощью поводка. ДВ преобразует угол наклона |
||
С |
|
|
стрелы в электр ческ й сигнал. ДВ конструктивно выполнен одина- |
||
ково с ДД. Отл |
тельной осо енностью являются профилированный |
|
экран, вл яющ й на формирование сигналов ДВ1 для измерения вы- |
||
лета и ДВ2 для заград тельной характеристики. Экран ДВ профили- |
||
рован так, |
|
на выходах преобразователей электриче- |
получить |
||
ский с гнал, соответствующий заградительной характеристике (канал |
||
ДВ2), с гнал для коррекции характеристики ДВ2 на углах поворота |
||
вала датчика более 30° (канал ДВ1) [6]. |
||
Панель сигнализации ПС, как и блок управления, устанавливает- |
||
|
чтобы |
|
|
|
А |
ся в кабине машиниста. В состав панели сигнализации входят (см. рис. 3.10) указатель степени загрузки УСЗ, указатель длины стрелы L,
сигнальные лампы ЛЗ и ЛК. УСЗ представляет собой миллиампер- |
|
ДУС |
|
метр с неоцифрованной шкалой. Он указывает лишь на приближение |
|
величины опрокидывающего момента к 100%. На УСЗ подается на- |
|
пряжение, равное разности выходных напряжений В2 и |
: UДВ2 – |
UДУС. При UДВ2 = UДУС стрелка индикатора указывает на 100%. Лишь |
|
это значение может быть указано точно, поэтому на шкале оцифрова- |
|
И |
|
на только риска 100. При этом следует иметь в виду, что под значением 100% понимается не номинальное значение опрокидывающего момента, определенное по грузовым характеристикам крана, а то значение, на которое настроен ограничитель. Указатель длины стрелы L представляет собой миллиамперметр, шкала которого отградуирована в метрах. На указатель длины стрелы подается напряжение с выхода ДД1. Сигнальные лампы ЛЗ и ЛК управляются контактами реле БУ (см. рис. 3.10). Если ограничитель выдает команду, разрешающую работу крана, горит зеленая лампа ЛЗ, красная лампа ЛК при этом погашена. При срабатывании ограничителя, когда выдается команда на отключение исполнительных механизмов крана, зеленая лампа ЛЗ гаснет, загорается красная ЛК [6].
47
Работа ограничителя основана на сравнении выходного сигнала датчика усилия с предельно допустимой величиной, задаваемой датчиком вылета, контролирующим вылет в зависимости от изменения
длины стрелы и угла её наклона. Сигналы с ДВ2 и ДУС поступают на входы У, расположенного в БУ. При этом величина сигнала на выходе ДВ2 может меняться переменными сопротивлениями R4 и R12 БУ. Напряжение на выходе ДУС UДУС пропорционально моменту оп-
Стойчивости. Если UДУС > UДВ2, то СУ обесточивает обмотку исполнительного реле, контакты которого выключают Лз, включают Лк и размыкают цепь п тан я электрогидрораспределителя гидросистемы подъёма стрелы, запрещая дальнейшее перемещение стрелы в сторо-
рокидыван я крана, напряжение на выходе ДВ2 UДВ2 – моменту ус-
шаяпитанияработу крана [6].
ну увел чен я момента опрокидывания крана. Если UДУС < UДВ2, то подается напряжен е на о мотку исполнительного реле, контакты ко-
из мод ф кацбй ОГБ-3 и выпускался Кишиневским заводом «Электроточприбор» ПО «Интроскоп» специально для установки на автокраны КС-3575А (г. Дрого ыч, Украина) на шасси ЗиЛ-133 ГЯ. Датчики длины, усилия и вылета прибора ОГБ-3П в целом аналогичны датчикам ОГБ-3 [6].
торого замыкают цепь электрогидрораспределителя, разре-
Огран ч тель грузоподъёмности ОГБ-3П-3575А является одной
Главное отличие прибора ОГБ-3П от ОГБ-3 – это наличие в ре- |
|
лейном блоке плат корректоров. Корректоры служат для повышения |
|
А |
|
точности задания допустимой грузоподъёмности крана в области |
|
Д |
|
больших углов наклона стрелы. Изменения были призваны более |
|
полно реализовать грузовые характеристики крана, однако это приве- |
|
ло к усложнению и удорожанию прибора. |
И |
|
|
Рассмотренные электронные ограничители грузоподъёмности имеют общие недостатки: ограниченность количества защитных характеристик; ограниченное количество контролируемых параметров грузоподъёмной машины; низкую вычислительную точность при обработке информационных сигналов; малоинформативную индикацию основных параметров грузоподъёмной машины; плохую совместимость с другими приборами и системами безопасности грузоподъёмных машин. В связи с этим, а также возросшими требованиями к безопасности работ, проводимых с помощью грузоподъёмных машин, на сегодняшний день данный вид приборов защиты не выпускается и практически не используется на современных машинах.
48
3.7. Структура и принцип работы ограничителей грузоподъёмности микропроцессорного типа
Актуальной задачей обеспечения безопасности грузоподъёмных машин на сегодняшний день является использование ограничителя Сгрузоподъёмности с увеличенным объёмом защитных характеристик, повышенной точностью и информативной способностью. Выполнение эт х требован й их комплексная реализация оказываются воз-
можными только с условием применением устройств на базе микропроцессорной техн ки. Решение этой задачи позволит накопить опыт
ческимиМ кропроцессорные ограничители обладают большими технинформац онными возможностями. Эти приборы в ком-
внедрен я эксплуатации микропроцессорных средств на ГПМ, развить средства д агностики, технического обслуживания и ремонта
этих средств |
пр ступить к решению более сложных, комплексных |
б |
|
задач управлен |
я [2, 4]. |
плексе позволяют выполнять несколько функций безопасности, таких как огран чен е грузоподъёмности, ограничение перемещений конструкций крана в лизиАЛЭП и различных препятствий, регистрировать в блоке памяти параметры ра оты ГПМ.
Принцип действия микропроцессорного ограничителя основан на последовательном опросе и преобразовании аналоговых сигналов с датчиков первичной информацииДв цифровой код, определении угла наклона и длины стрелы, расчёте цифровыми методами вылета, высоты подъёма и фактического веса груза с последующим сравнением с предельно допустимыми значениями, заложенными в память ограничителя в виде грузовых характеристик. Выбор грузовой (защитной) характеристики, т.е. соотношение между весомИгруза и вылетом, производится ограничителем в зависимости от режима работы и вида стрелового оборудования. При превышении допустимой нагрузки при данном вылете формируются исходные команды управления блокировочными устройствами. В ограничителях микропроцессорного типа сигналы всех датчиков совместно с данными о характеристиках отключения, находящихся в запоминающем устройстве, обрабатываются блоком обработки данных в соответствии с заданным алгоритмом, а результат обработки выводится на блок индикации и блок средств отключения механизмов крана при превышении фактической нагрузкой допустимого значения [2, 4].
49
Существует огромное разнообразие ограничителей грузоподъ- |
||||||||||
ёмности микропроцессорного типа, однако при рассмотрении их |
||||||||||
функциональных и конструктивных особенностей можно представить |
||||||||||
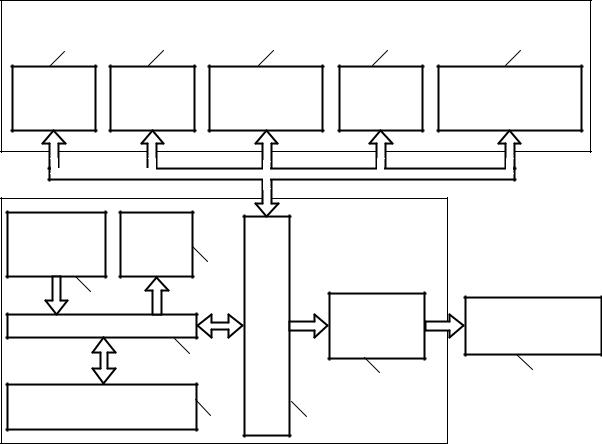
обобщенную типовую структуру данных приборов (рис. 3.12) [2, 4]. |
||||||||||
2 |
|
|
Датчики параметров работы крана |
|
||||||
10 |
|
|
11 |
|
12 |
|
|
13 |
14 |
|
Датч к |
|
Датч к |
|
Датчик |
|
|
Датчик |
Дополнительные |
||
|
дл ны |
|
угла наклона |
|
|
|||||
|
|
|
|
|
азимута |
датчики |
||||
|
|
стрелы |
|
|
стрелы |
|
|
|||
|
|
|
|
|
|
|
|
|||
С |
|
|
|
|
|
|
|
|
||
Органы |
|
Инд ка- |
|
|
|
|
Цифровой |
|
||
я |
|
|
|
вычислитель |
|
|||||
управлен |
торы |
|
|
|
|
|
|
|
||
нагрузки |
|
|
|
|
||||||
|
|
|
|
|
5 |
вывода/ |
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ввода |
|
Выходное |
|
||
Микроконтроллер |
|
|
|
Исполнительное |
||||||
|
|
|
устройство |
устройство |
||||||
|
|
|
|
|||||||
|
б |
|
||||||||
|
|
|
|
|
3 |
Устройство информации |
|
|
8 |
9 |
|
|
|
|
|
|
|
|
|||
Запоминающее |
|
|
6 |
|
|
|
|
|||
устройство |
|
|
7 |
|
1 |
|
||||
|
|
|
|
А |
|
|||||
Рис. 3.12. Типовая структурная схема ограничителя грузоподъёмности |
||||||||||
|
|
|
|
|
микропроцессорного типа |
|
||||
В общем случае микропроцессорный ограничитель грузоподъ- |
||||||||||
|
|
|
|
|
|
Д |
||||
ёмности содержит датчики параметров работы грузоподъёмного кра- |
||||||||||
на 10 – 14, цифровой вычислитель 1, включающий в себя микрокон- |
||||||||||
троллер 3, энергонезависимое запоминающее устройство 6, выпол- |
||||||||||
ненное с возможностью хранения значений настроечных параметров, |
||||||||||
устройство ввода/вывода информации 7 и выходное устройство 8. |
||||||||||
|
|
|
|
|
|
|
|
|
И |
|
Микроконтроллер 3 выполнен с возможностью считывания из |
||||||||||
энергонезависимого запоминающего устройства 6 значений настро- |
||||||||||
ечных параметров и с возможностью их сложения, вычитания, умно- |
||||||||||
жения и/или деления с выходными сигналами датчиков параметров |
||||||||||
работы грузоподъёмного крана 2 или с сигналами, являющимися ре- |
||||||||||
зультатами преобразования выходных сигналов этих датчиков. |
||||||||||
50