Материал: 2451
Структурная схема ПБТ-1 изображена на рис. 5.3 [29]. |
|
|
||||||||||
Датчики |
Узел |
Микроконтроллер |
|
Память |
|
|
|
|
|
|||
|
нагрузочных |
|
|
|
|
|
Память |
|
|
|||
|
|
|
|
|
данных |
|
|
|
||||
|
резисторов |
|
|
|
|
|
программ |
|
|
|||
|
|
|
|
|
|
ЭПЗУ |
ОЗУ |
|
|
|||
ДНТ |
|
|
|
|
|
|
|
|
|
|||
|
ввод |
|
|
|
|
|
|
|
|
|
|
|
Резерв |
|
|
|
|
|
|
|
|
|
|
|
|
|
Аналоговый |
|
|
|
|
|
|
|
|
Генератор |
||
|
|
АЦП |
|
|
|
|
|
|
|
|||
|
|
|
М |
|
|
Пр |
|
тактовых |
||||
|
|
|
|
|
|
|
||||||
ДУНП |
|
|
|
|
|
|
|
|
|
импульсов |
||
|
|
|
|
|
|
|
|
|
|
|
||
АБ |
|
|
|
|
|
|
|
Сброс при |
Сброс при |
Таймер |
||
|
|
|
|
|
|
|
снижении |
включении |
||||
ДУНС |
|
|
|
ввод/вывод |
напряжения |
напряжения |
«сторожа» |
|||||
|
|
|
|
|
|
|
питания |
питания |
цикла |
|||
Р1 |
|
|
|
|
|
|
|
|
|
|
|
|
Дискретный |
|
|
|
|
МГР |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Р2 |
|
Органы управления |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||||
|
б |
|
|
Узел ввода сигналов внешних датчиков |
||||||||
|
Квазилинейный индикатор |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
||||
Р3 |
|
|
|
|
|
|
Цифровые индикаторы |
|
|
|||
|
|
|
|
|
|
|
|
|
||||
|
|
+ 24 В |
Узел |
+ 5 В |
|
Звуковой сигнализатор |
|
Узел |
||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||
|
|
А+ 24 В |
|
индикации и |
||||||||
Узел выходных реле |
|
питания |
|
|
|
Единичные индикаторы |
сигнализации |
|||||
|
|
|
|
|
||||||||
|
Рис. 5.3. Схема структурная прибора ПБТ-1 |
|
|
|||||||||
|
|
|
|
|
Д |
|
||||||
В соответствии со структурной схемой ПТБ-1 (см. рис. 5.3) блок |
||||||||||||
БОД содержит следующие узлы [29]: |
|
|
|
|
|
|
|
|||||
• |
Микроконтроллер, выполненный на базе РIC-процессора и |
|||||||||||
содержащий в своем |
составе |
собственно |
|
процессор Пр, |
аналого- |
|||||||
|
|
|
|
|
|
|
|
И |
||||
цифровой преобразователь АЦП, мультиплексор М, генератор такто- |
||||||||||||
вых импульсов, запоминающие устройства (в том числе энергонеза- |
||||||||||||
висимое постоянное ЭПЗУ) с памятью программ и данных, дискрет- |
||||||||||||
ный ввод/вывод и схемы установки исходного состояния программы |
||||||||||||
при включении прибора, а также при снижении напряжения питания |
||||||||||||
и нарушении цикла программы; |
|
|
|
|
|
|
|
|
|
|||
151
• узел нагрузочных резисторов, предназначенный для нормализации сигналов датчиков, имеющих выходной сигнал по току;
• узел органов управления (кнопки) для выбора режима работы (при различной конфигурации оборудования кранатрубоукладчика), выбора индицируемых параметров и обеспечения настройки (калибровки) прибора на кране-трубоукладчике;
• узел индикации и сигнализации, содержащий два цифровых индикатора кол чественной информации, квазилинейный индикатор (светод одная л нейка) для индикации степени загрузки, единичные индикаторы для с гнал зации о выбранном режиме работы, индици-
руемых параметрах |
условиях безопасной работы, а также звуковой |
|
С |
|
|
|
затор; |
|
• |
узел ввода с гналов внешних дискретных датчиков МГР, |
|
обеспеч вающ й гальваническую развязку штатных органов контро- |
||
ля крана- |
ка от цепей блока БОД; |
|
сигнал• |
||
|
узел выходных реле содержит дискретные усилители, три |
|
коммут рующ х реле, переключающие цепи управления и сигнали- |
||
зации крана-тру оукладчика, и самовосстанавливающиеся предохра- |
||
нители для защиты выходных контактов реле; |
||
• |
трубоукладч |
|
|
узел питания, создающий стабилизированные напряжения |
|
для цепей блока БОД и о еспечивающий их гальваническую развязку |
||
от бортовой сети крана-тру оукладчика, а для поддержания инфор- |
||
мации о реальном времени регистрации параметров – автономный ис- |
||
точник напряжения (Алитиевая батарея). |
||
Работа прибора основана на последовательном опросе и преоб- |
||
разовании аналоговых и дискретных сигналов датчиков первичной |
||
|
|
Д |
информации ДНТ, ДУНС, ДУНП и различных концевых выключателей в цифровой код, определении угла наклонаИстрелы и рамы, расчете цифровыми методами величины вылета и величины загрузки кра- на-трубоукладчика с последующим их сравнением с предельнодопустимыми значениями при выбранном режиме работы.
Характеристики допустимой нагрузки на крюке для конкретных типов кранов-трубоукладчиков и режимов их работы (видов оборудования) заложены в виде грузовых характеристик в ЭПЗУ. Эти характеристики используются для информирования машиниста о фактических и предельных значениях нагрузки, а также для автоматического отключения механизмов подъёма крюка и изменения вылета при перегрузках.
152
Для записи калибровочных таблиц и регистрации параметров работы крана-трубоукладчика также используется ЭПЗУ, а для по д- держания информации о реальном времени – таймер (часы реального времени) с автономным источником напряжения (литиевой батареей).
К блоку БОД подключаются датчики ДНТ (ДНТ-У или два ДНТ-Д), и ДУНП, а также в соответствующей модификации может быть подключен АБ для контроля приближения к ЛЭП. Сигналы антенного блока АБ в кодированной форме поступают непосредственно в м кропроцессор БОД.
Расчет параметров грузоподъёмности крана-трубоукладчика и |
||||
степени его загрузки осуществляется в блоке БОД по значениям ин- |
||||
формац онных с гналов датчиков (ДНТ, ДУНС). По результатам |
||||
ДУНС |
|
режимов |
работы крана- |
|
расчета, |
дост жении предельных |
|||
трубоукладч ка (по углу наклона стрелы и грузоподъёмности) или |
||||
предельных положен й стрелы или рамы, блок БОД создает сигналы |
||||
на инд каторы, а |
ра оте крана-трубоукладчика с отдельными |
|||
при |
|
|
||
|
б |
|
|
|
грузами (вне колонны) – управляющие сигналы на реле отключения |
||||
механ змов с нормально открытыми контактами. Эти сигналы в сис- |
||||
тему управления |
крана-тру оукладчика |
выводятся |
через отдельный |
|
соединитель. К другому соединителю подключены аналоговые и дискретные датчики [29].
Для считывания показаний регистратора прибор содержит специальный соединитель, к которому исключен несанкционированный
доступ. |
А |
|
|
Программное обеспечение прибора включает в себя подпро- |
|
грамму тестирования и рабочую подпрограмму. При запуске подпро- |
|
граммы тестирования (при включении прибора) процессор Пр после |
|
|
Д |
режима самоконтроля проверяет исправность цифровых и единичных |
|
|
И |
индикаторов, засвечивая их на 1 – 2 секунды. Кроме того, после подачи напряжения питания и в процессе работы ведется контроль состояния цепей датчиков.
БОД устанавливается в кабине крана-трубоукладчика в удобном для обозрения месте и для улучшения восприятия информации должен быть защищен от засвечивания прямыми солнечными лучами. Он обеспечивает контроль работоспособности прибора как автоматически, так и по запросу машиниста (отключением и повторным включением питания). Управление переключением рабочих режимов и переключением выводимой информации осуществляется с лицевой панели блока БОД группой кнопок, которым в зависимости от режима Калибровка или Работа приданы различные функции.
153
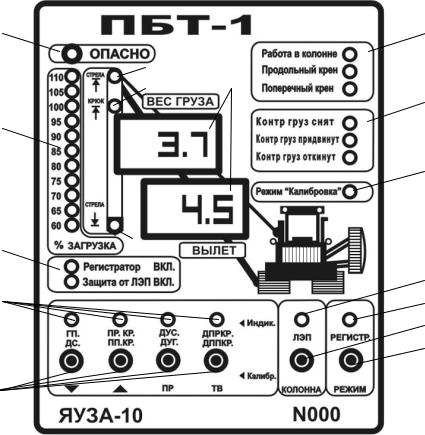
На лицевой панели располагаются также (рис. 5.4) два цифровых индикатора 3, группа точечных индикаторов и кнопки управления прибором с соответствующими им мнемосимволами, которые указывают на двойное назначение кнопок, зависящее от положения
переключателя «Р/К» (режимов Работа или Калибровка) [29]. |
|||
С6 |
|
2 |
|
1 |
|
|
|
|
7 |
3 |
|
|
8 |
|
|
и |
|
4 |
|
|
|
|
|
|
б |
5 |
|
|
|
||
10 |
9 |
|
|
11 |
А |
13 |
|
|
|
||
|
|
14 |
|
|
|
|
15 |
|
|
|
16 |
12Рис. 5.4. Внешний вид переднейБОДпанели ПБТ-1
Врежиме Работа функции кнопок обозначеныИнадписями над кнопками; выбор соответствующей функции подтверждается засвечиванием единичных индикаторов.
Кнопка «ЛЭП/КОЛОННА» 15 обеспечивает путём нажатия с удержанием на 2 с перевод управляющего сигнала прибора в режим ограничителя или в режим индикатора; этой кнопкой при работе кра- на-трубоукладчика в составе колонны оператором задается режим блокирования срабатывания реле перегрузки или предельного угла наклона платформы.
Кнопка «РЕГИСТР/РЕЖИМ» 16 обеспечивает путём последовательного нажатия с удержанием на 2 с ввод положения и соответствующее этому положению переключение грузовой характеристики.
154
Выбранная грузовая характеристика индицируется тремя инди-
каторами 4: |
|
|
|
|
|
|
|
«Контргруз снят»; |
|
|
|
||||
«Контргруз придвинут»; |
|
|
|||||
«Контргруз откинут». |
|
|
|
||||
С |
|
«ПР.КР./ПП.КР.», |
«ДУС./ДУГ.», |
||||
Кнопки |
«ГП./ДС.», |
||||||
«ДПРКР./ДППКР.» 12 обеспечивают переключение информации на |
|||||||
цифровых индикаторах 3 [29]: |
|
|
|
||||
• |
в основном режиме, когда кнопки не нажаты, на верхнем |
||||||
цифровом |
нд каторе отображается вес подвешенного груза в тоннах |
||||||
при |
|
|
|
||||
(усилие на крюке в (тс) при «косой» нагрузке) и вылет в метрах; |
|
||||||
• |
|
|
нажат |
удерживании кнопки «ГП./ДС.» на верхнем |
|||
цифровом |
нд каторе ото ражается текущая грузоподъёмность в |
||||||
крана-трубоукладчика(наклон в сторону груза отображается со зна- |
|||||||
тоннах; |
на н жнем |
ндикаторе высветится текущая длина стрелы в |
|||||
метрах; |
|
|
нажат |
удерживании кнопки «ПР.КР./ПП.КР.» на |
|||
• |
|
|
|||||
верхнем |
нд каторе ото ражается угол продольного наклона крана- |
||||||
трубоукладч |
(подъём при движении машины вперед отображается |
||||||
со знаком плюс), а на нижнем индикаторе – угол поперечного наклона |
|||||||
ком минус). |
|
|
|
|
|
|
|
• |
при нажатии и удерживании кнопки « УС./ |
УГ.» на верх- |
|||||
|
|
|
|
|
ДППКР |
|
|
нем индикаторе отображается текущее напряжение, поступающее от |
|||||||
датчика усилия, в вольтахА; на нижнем индикаторе – напряжение, по- |
|||||||
ступающее от датчика угла наклона стрелы, в вольтах. |
|
|
|||||
• |
при нажатии и удерживании кнопки « ПРКР./ |
.» на |
|||||
верхнем индикаторе отображается текущее напряжение, поступающее |
|||||||
|
|
|
|
|
И |
||
от датчика продольного крена, в вольтах; на нижнем индикаторе – напряжение, поступающее от датчика поперечного крена, в вольтах.
Кнопка «ЛЭП/КОЛОННА» 15 обеспечивает переключение информации и ввод параметров защиты от опасного приближения к ЛЭП. На верхнем цифровом индикаторе высвечивается обозначение LEP, а на нижнем – задаваемый уровень напряжения ЛЭП. При последовательном нажатии кнопки происходит переключение диапазонов чувствительности прибора, начиная с наивысшего (который устанавливается автоматически при первом нажатии). На нижнем индикаторе отображается переключаемый диапазон, начиная с 0,22, затем 6, 35, 110, 500 кВ; после установки диапазона и отпускания кнопки через 5 – 6 с на индикаторах вновь отображается вес груза и вылет[29].
155